养虾小记|让你的龙虾也能实现“萝卜纸巾”
OpenClaw作为近期热门开源项目,凭借简洁的操作逻辑与强大的适配能力,成为机械臂控制领域的关注焦点。其可实现AI指令与设备执行的全流程联动,大幅降低机械臂操控门槛。
上期,我们学习了OpenClaw对NERO七轴臂的控制,本期将整合 OpenClaw 快速部署配置流程与 GrabGen 抓取系统的硬件适配、环境搭建、项目部署实操步骤,从 AI 智能体配置到六轴机械臂自主抓取落地,手把手带你完成从零基础到智能抓取的全链路搭建,轻松实现 AI 驱动的机械臂自主作业。
DEMO
OpenClaw 自主识别与场景理解
让你的openclaw龙虾学会抓取
进入OpenClaw官网https://openclaw.ai/
执行一键安装命令:
curl -fsSL https://openclaw.ai/install.sh | bash
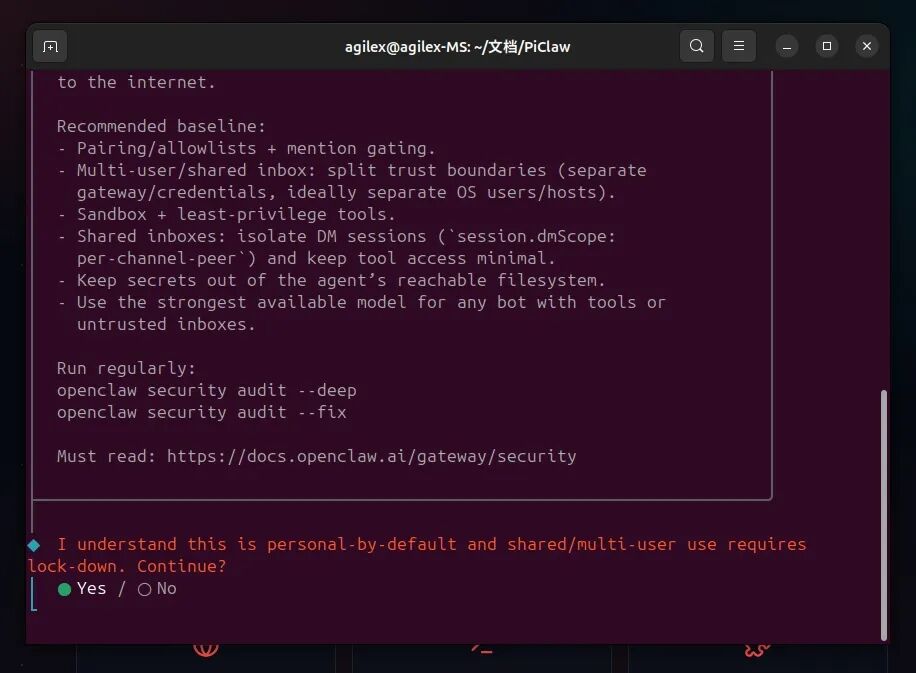
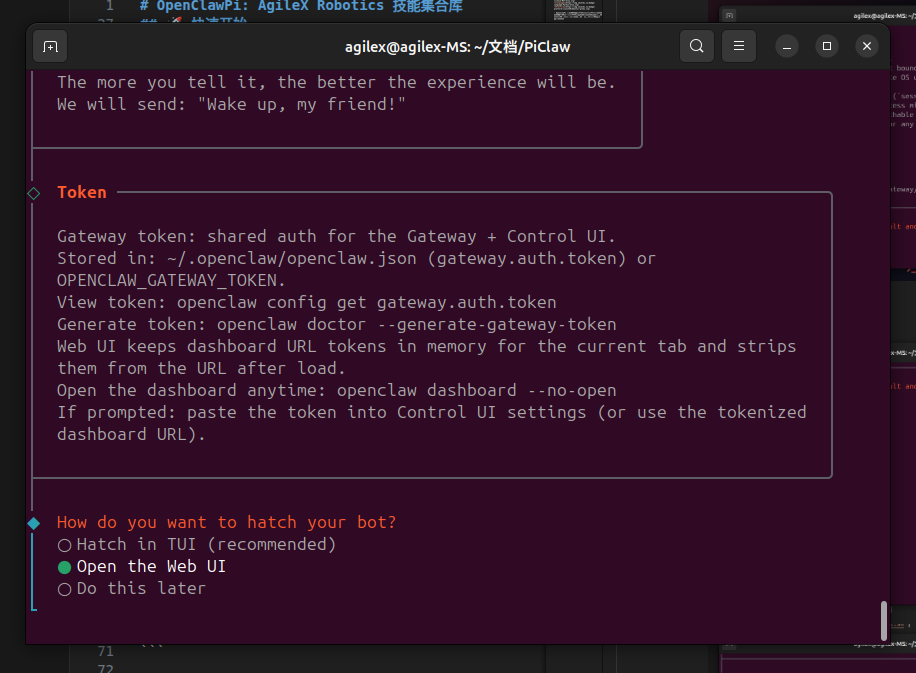
接下来进行OpenClaw配置
-
选择’YES’
-
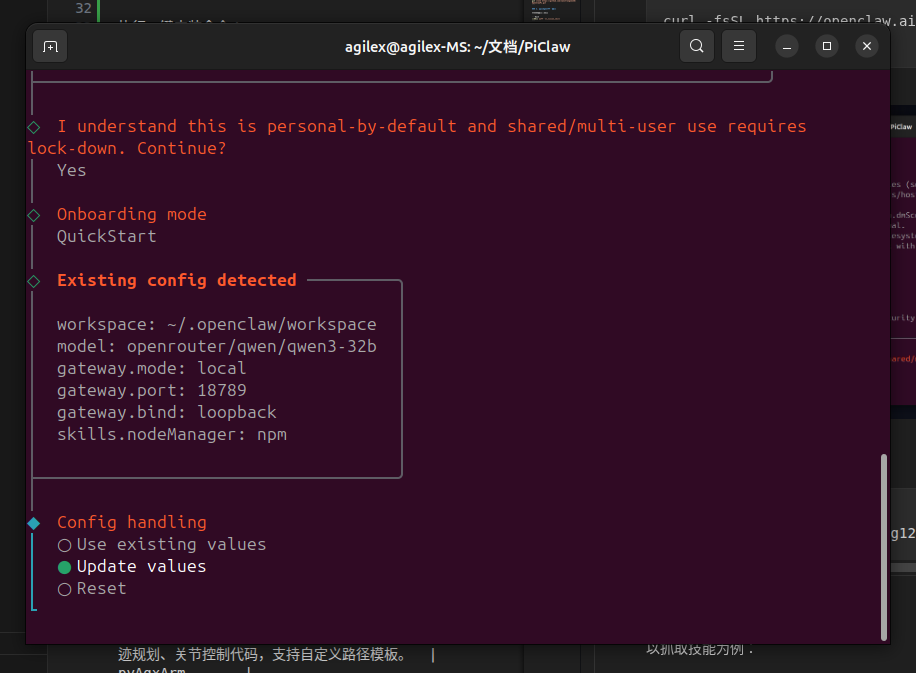
选择’QuickStart’
-
选择’Update values’
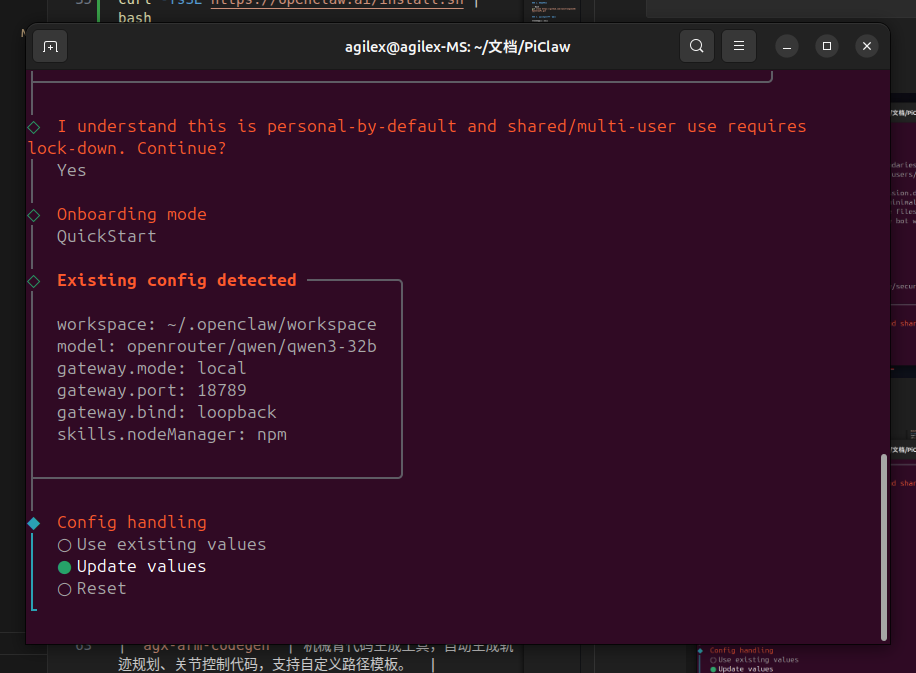
-
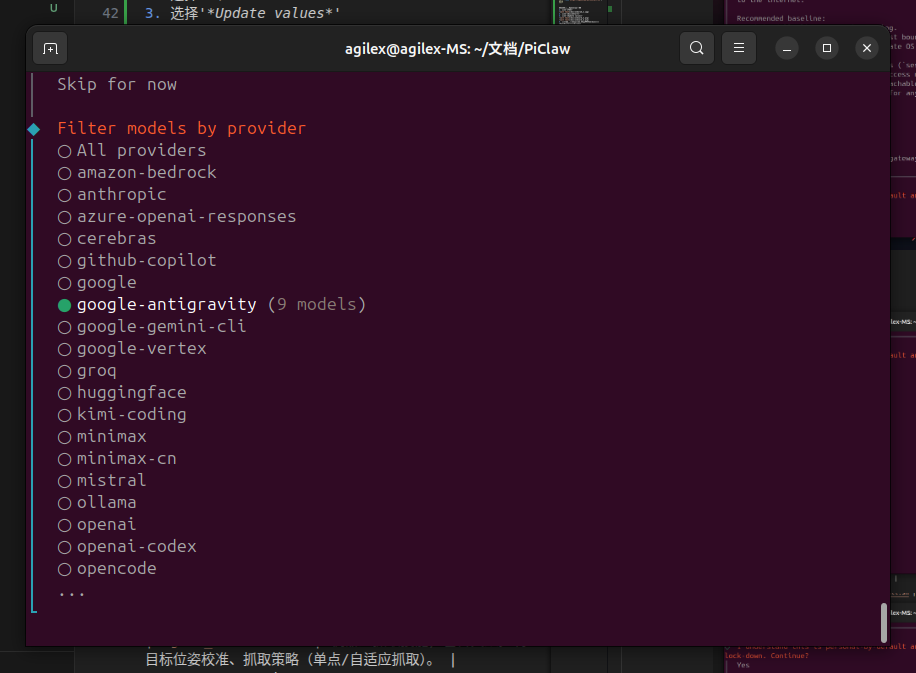
选择你使用的提供商,推荐免费的Qwen,OpenRouter,Ollama
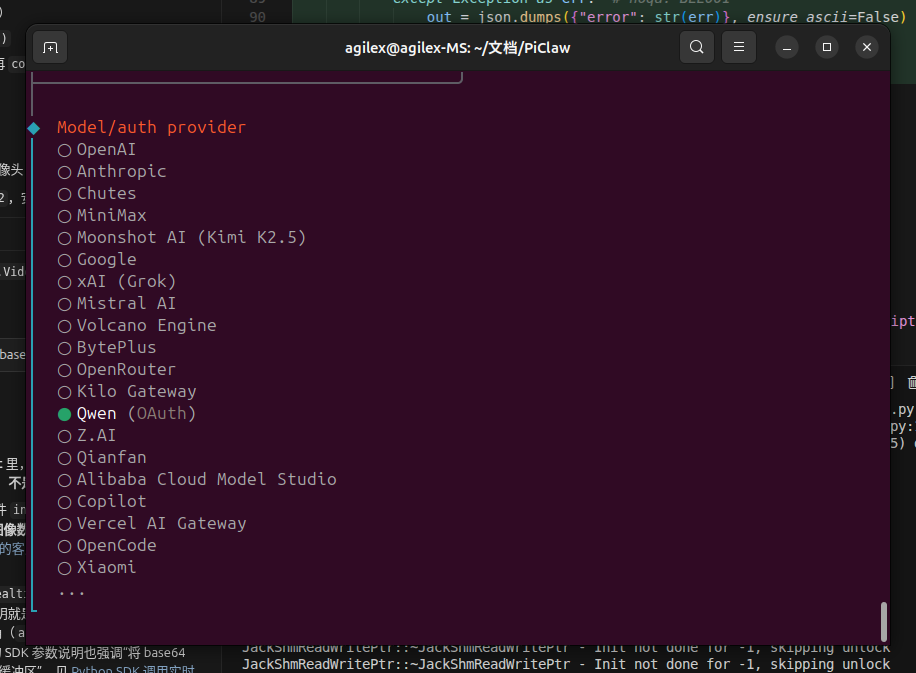
-
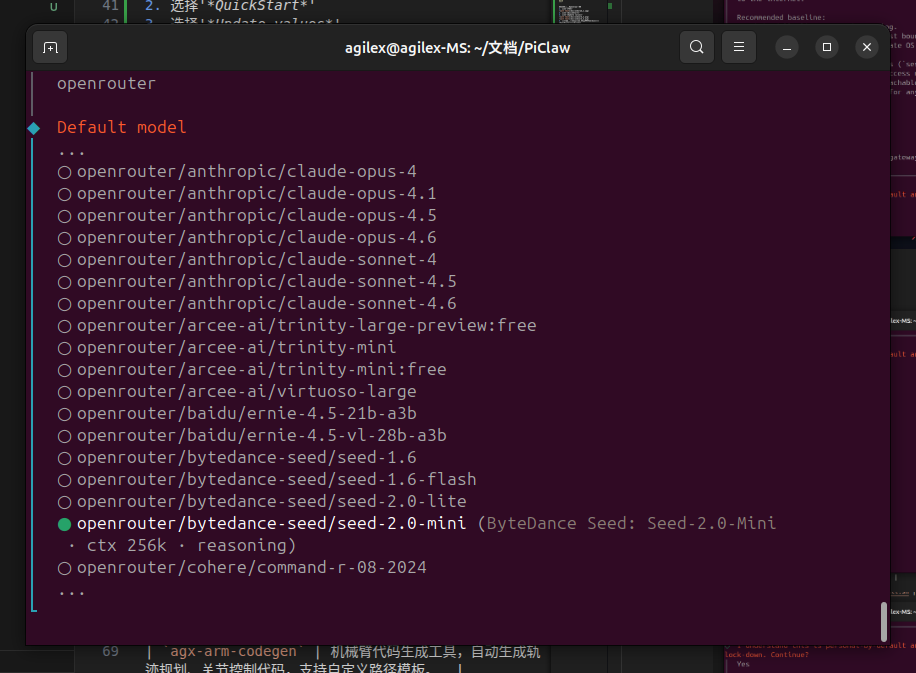
选择你希望使用的公司的模型
-
选择一个默认模型
-
选择你将要接入龙虾的APP
-
选择网页搜索提供商
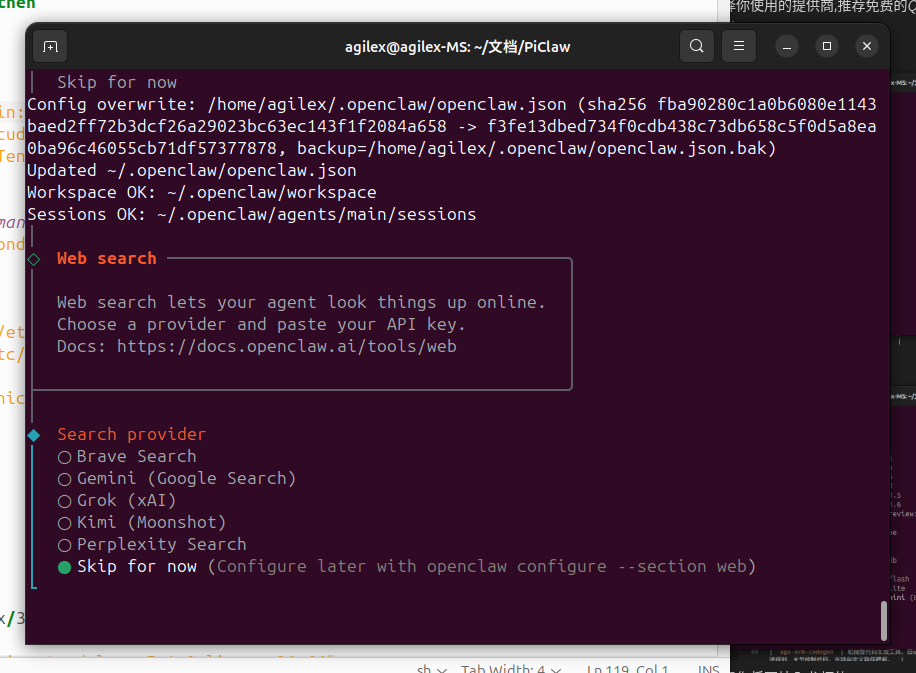
-
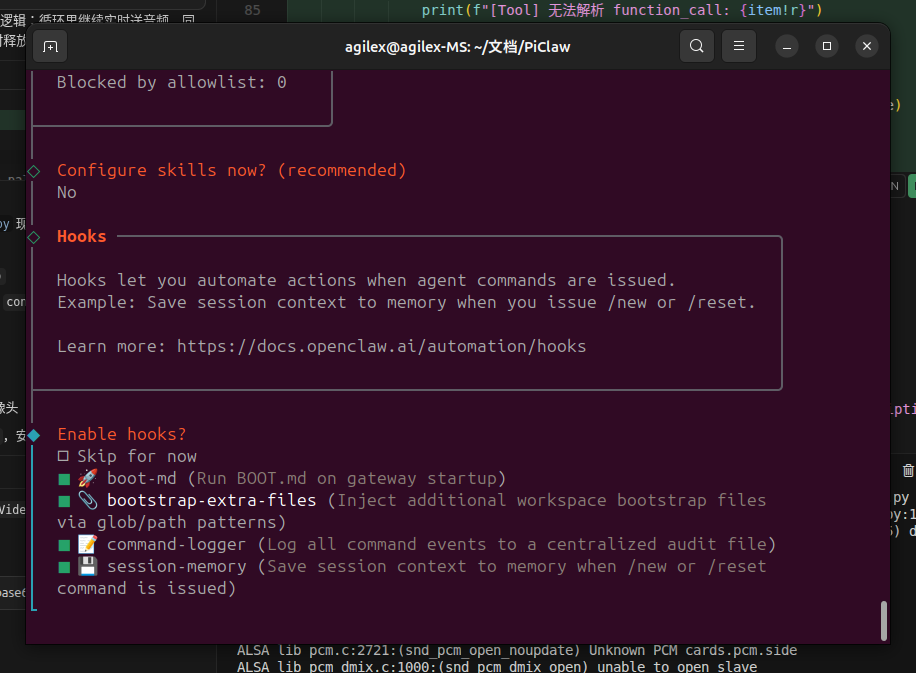
选择技能(暂时不需要)
-
钩子全选
-
选择’restart’
-
选择’Web UI’
1. 克隆项目
git clone https://github.com/vanstrong12138/OpenClawPi.git
2. 提示Agent学习技能
以抓取技能为例:
用户: 请学习vl_vision_skill
二、GraspGen-位姿生成与抓取
硬件要求
- x86桌面平台
- 显存不少于16G的英伟达显卡
- realsense
项目部署平台
- Ubuntu24.04
- ROS jazzy
- RTX 5090
- NVIDIA Driver Version 570.195.03
- CUDA Version 12.8
- 安装NVIDIA显卡驱动
sudo apt update
sudo apt upgrade
sudo add-apt-repository ppa:graphics-drivers/ppa
sudo apt update
sudo apt install nvidia-driver-570
#重启
reboot
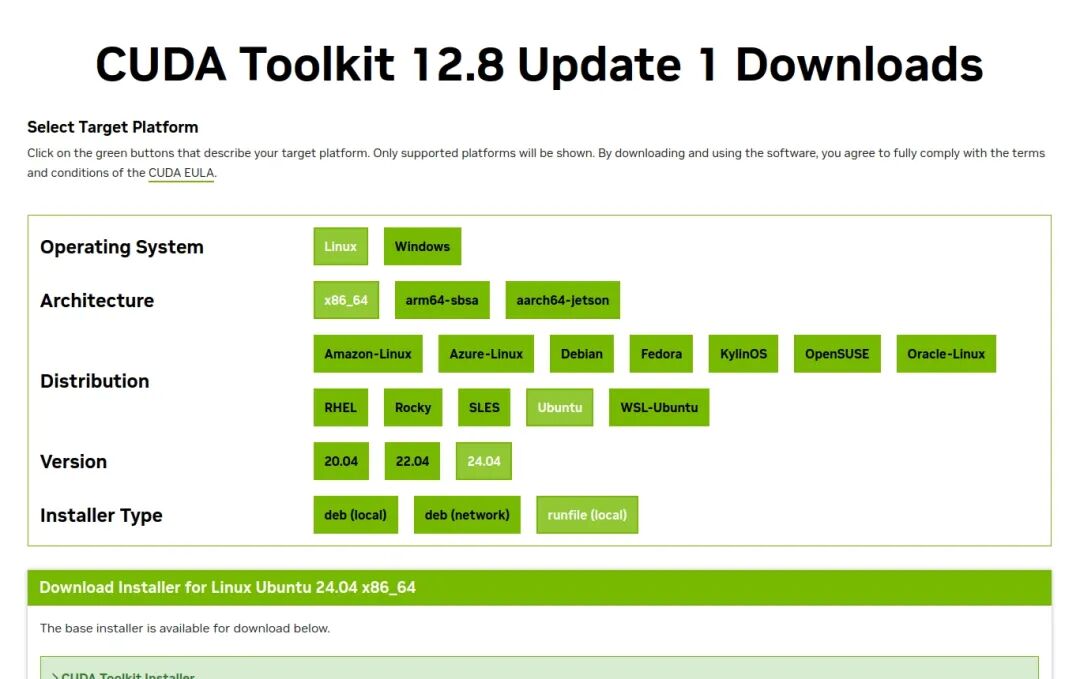
- 安装CUDA Toolkit 12.8
-
先前往NVIDIA官网下载CUDA的runfile文件
-
执行安装命令
wget https://developer.download.nvidia.com/compute/cuda/12.8.1/local_installers/cuda_12.8.1_570.124.06_linux.run
sudo sh cuda_12.8.1_570.124.06_linux.run
- 安装时取消勾选第一项driver,因为我们第一步已经安装过显卡驱动了
- 添加环境变量
echo 'export PATH=/usr/local/cuda-12.8/bin:$PATH' >> ~/.bashrc
echo 'export LD_LIBRARY_PATH=/usr/local/cuda-12.8/lib64:$LD_LIBRARY_PATH' >> ~/.bashrc
source ~/.bashrc
- 安装后可以执行nvcc -V查看CUDA信息
nvcc -V
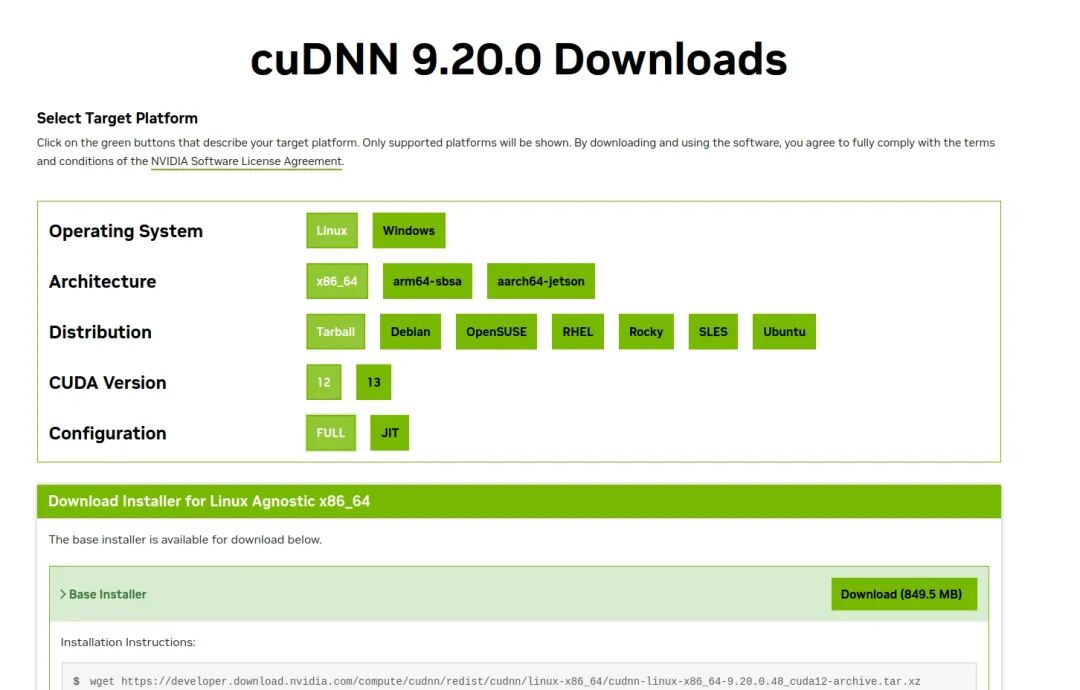
- 安装cuDnn
-
去NVIDIA官网下载cuDnn的tar文件,解压后对文件进行拷贝
-
解压后执行下面的命令把cuDNN拷贝到CUDA的安装目录下
sudo cp cuda/include/cudnn*.h /usr/local/cuda/include
sudo cp cuda/lib/libcudnn* /usr/local/cuda/lib64
sudo chmod a+r /usr/local/cuda/include/cudnn*.h /usr/local/cuda/lib64/libcudnn*
- 安装TensorRT,去NVIDIA官网下载TensorRT的tar文件,解压后对文件进行拷贝
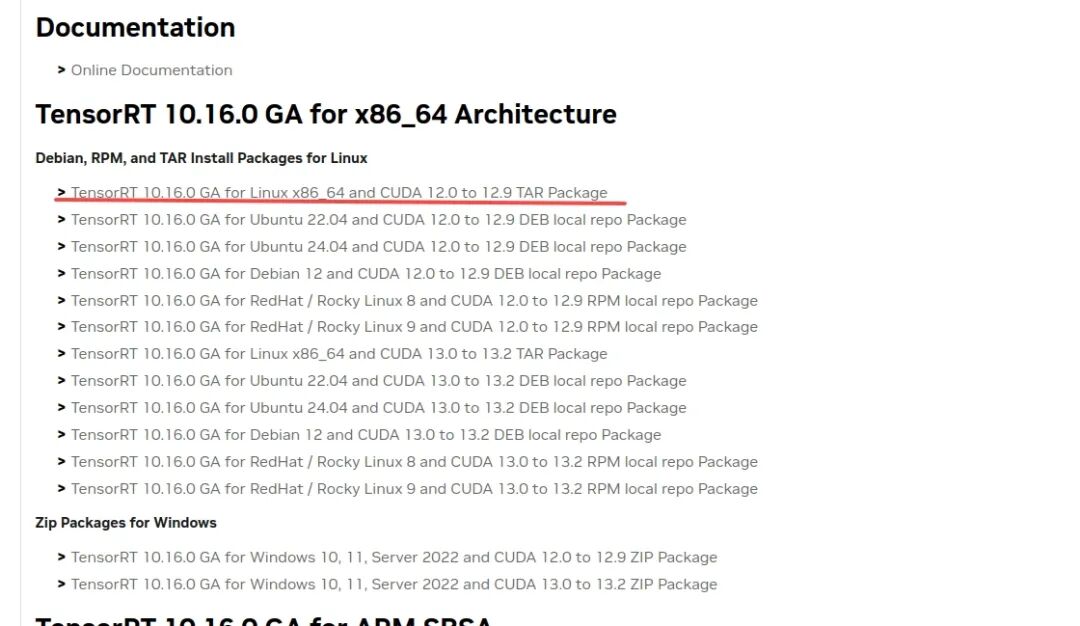
- 解压后执行下面的命令把TensorRT拷贝到/usr/local目录下
#解压
tar -xvf TensorRT-10.16.0.72.Linux.x86_64-gnu.cuda-12.9.tar.gz
#进入TensorRT-10.16.0.72.Linux.x86_64-gnu.cuda-12.9
cd TensorRT-10.16.0.72.Linux.x86_64-gnu.cuda-12.9/
#拷贝到/usr/local目录下
sudo mv TensorRT-10.16.0.72/ /usr/local/
- 测试TensorRT是否安装成功
#进入MNIST手写数字识别的目录下
cd /usr/local/TensorRT-10.16.0.72/samples/sampleOnnxMNIST
#编译
make
#在/usr/local/TensorRT-10.16.0.72/bin找到可执行文件sample_onnx_mnist
cd /usr/local/TensorRT-10.16.0.72/bin
./sample_onnx_mnist
SAM3部署
- Python 3.12 or higher
- PyTorch 2.7 or higher
- CUDA-compatible GPU with CUDA 12.6 or higher
- 创建conda虚拟环境
conda create -n sam3 python=3.12
conda deactivate
conda activate sam3
- 安装与cuda版本兼容的pytorch
# 50系列显卡推荐用cuda12.8 torch2.8
# CUDA 12.8
# numpy建议降级到<1.23
pip install torch==2.8.0 torchvision==0.23.0 torchaudio==2.8.0 --index-url https://download.pytorch.org/whl/cu128
cd sam3
pip install -e .
- 模型下载
- 提交表格获取HugginFace模型下载资格https://huggingface.co/facebook/sam3
- 国内镜像站搜索
机械臂驱动部署
项目发布的是target_pose末端位姿,可以手动修改为其他机械臂
- 以PiPER机械臂为例
pip install python-can
git clone https://github.com/agilexrobotics/pyAgxArm.git
cd pyAgxArm
pip install .
克隆
- 克隆此项目到本地
cd YOUR_PATH
git clone -b ros2_jazzy_version https://github.com/AgilexRobotics/GraspGen.git
运行
- 抓取节点
python YOUR_PATH/sam3/realsense-sam.py --prompt "目标物体英文名称"
- 执行抓取任务
A=主臂零力 D=普通模式+记录位姿 S=回零 X=复现位姿 Q=夹爪开 E=夹爪合 p=点云/抓取 t=改提示词 g=下发抓取 Esc=退出
- 自动抓取任务
python YOUR_PATH/sam3/realsense-sam.py --prompt "目标物体英文名称" --auto
如何使用
user> 请学习一个新技能:在目录下“your_openclaw_path/skills/grab_skill”
openclaw> .......(“已经学会了”)
user> 进行测试,现在抓取桌面上的萝卜
openclaw> .......(“成功抓取”)
从OpenClaw的一键部署、快速配置,到 GrabGen 抓取系统的显卡驱动、CUDA、TensorRT 等环境编译,再到 SAM3 视觉模型部署、机械臂驱动对接与抓取技能学习,整套方案完整打通了 AI 智能体与机械臂自主抓取的技术闭环。
依托免费大模型加持、开源项目支撑和标准化部署流程,无需复杂的底层开发,即可快速实现机械臂对目标物体的精准识别与自主抓取,无论是机器人开发入门、科研实验还是小型自动化场景落地,都能高效落地应用。
实操过程中如果遇到问题,欢迎在评论区留言交流,后续我们也会持续更新OpenClaw的更多实操教程,带你解锁这只“开源龙虾”的全部潜力,一起在技术热点里稳步成长,
评论区留言,你还想看松灵机器人用openclaw做点什么?
往期推荐

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)