滑模控制在双向 Buck - Boost 升降压斩波电路中的探索
滑模控制双向Buck_Boost升降压斩波电路,cuk电路,开环闭环,matlab/simulink模型,隔离,非隔离双向Buck~Boost电路,采用单相半桥形式,电流内环,电压外环
在电力电子领域,双向 Buck - Boost 升降压斩波电路是一种极为重要的拓扑结构,它能够实现灵活的电压升降转换,在众多场合都有着广泛应用。今天咱就聊聊滑模控制在这电路里的门道,顺便再提提 Cuk 电路以及相关的开环闭环控制,还有 Matlab/Simulink 模型的搭建。
双向 Buck - Boost 电路的基本形式
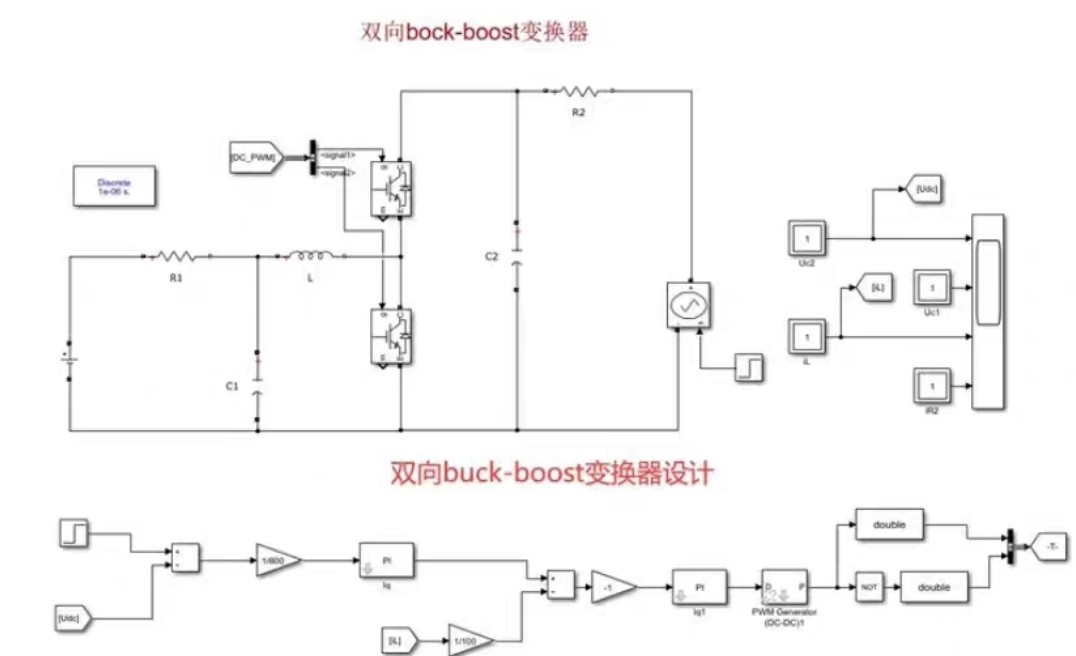
双向 Buck - Boost 电路有隔离与非隔离之分。咱这儿采用的是单相半桥形式的非隔离双向 Buck - Boost 电路。它的一大特点就是可以根据需求灵活地将输入电压升高或降低输出。
简单来讲,当开关管导通时,电感储存能量;开关管关断时,电感释放能量给负载。下面来段简单的代码示意一下基本的开关控制逻辑(以 Python 为例,虽然实际硬件控制可能用汇编、C 等语言,但逻辑类似):
# 假设这里有一个开关状态变量,1 表示导通,0 表示关断
switch_status = 1
if switch_status == 1:
print("开关导通,电感储存能量")
else:
print("开关关断,电感释放能量")这段代码简单模拟了开关管的两种状态,通过控制 switch_status 变量来决定电感是处于储能还是释能阶段。在实际电路中,这个开关状态是由复杂的控制算法来决定的。
滑模控制策略
滑模控制在双向 Buck - Boost 电路中发挥着关键作用。它能让系统在面对参数变化和外界干扰时,依然保持良好的性能。滑模控制的核心思想就是让系统状态沿着预先设定的“滑动面”运动,从而达到稳定控制的目的。
下面是一个简单的滑模控制算法的伪代码框架:
// 定义控制变量和参数
float k; // 控制增益
float s; // 滑动面变量
float x1, x2; // 系统状态变量
// 初始化变量
x1 = initial_value1;
x2 = initial_value2;
k = gain_value;
while (true) {
// 计算滑动面
s = x1 + k * x2;
if (s > 0) {
// 控制动作 1,比如开关管导通
control_action = ON;
} else {
// 控制动作 2,比如开关管关断
control_action = OFF;
}
// 更新系统状态变量
x1 = update_x1(x1, x2, control_action);
x2 = update_x2(x1, x2, control_action);
}在这个伪代码里,通过不断计算滑动面 s 的值,根据其正负来决定控制动作(开关管的导通或关断),同时更新系统状态变量,使得系统沿着滑动面稳定运行。
电流内环与电压外环控制
为了进一步提升双向 Buck - Boost 电路的性能,常常采用电流内环和电压外环的双环控制结构。电压外环主要负责稳定输出电压,电流内环则对电流进行快速跟踪和调节,以提高系统的动态响应。
滑模控制双向Buck_Boost升降压斩波电路,cuk电路,开环闭环,matlab/simulink模型,隔离,非隔离双向Buck~Boost电路,采用单相半桥形式,电流内环,电压外环
比如说,在 Matlab/Simulink 中搭建双环控制模型时,电压外环的输出作为电流内环的参考值。代码方面,以 Matlab 代码简单示意一下电压外环的比例积分(PI)控制算法:
% 定义参数
kp = 0.5; % 比例系数
ki = 0.1; % 积分系数
error_sum = 0;
prev_error = 0;
% 假设这里有一个参考电压和实际输出电压
ref_voltage = 12;
actual_voltage = 10;
for i = 1:num_steps
error = ref_voltage - actual_voltage;
error_sum = error_sum + error;
control_signal = kp * error + ki * error_sum;
% 根据控制信号调整电路参数,这里简单示意,实际需与电路模型结合
actual_voltage = adjust_voltage(actual_voltage, control_signal);
prev_error = error;
end这段 Matlab 代码实现了一个简单的电压外环 PI 控制,通过不断计算误差并调整控制信号,来使得实际输出电压接近参考电压。
Cuk 电路的关联
Cuk 电路也是一种重要的 DC - DC 变换电路,它和双向 Buck - Boost 电路有相似之处,都能实现升降压功能。不过 Cuk 电路的优势在于其输入输出电流连续,纹波较小。在某些对电流稳定性要求较高的场合,Cuk 电路可能会是更好的选择。但双向 Buck - Boost 电路在灵活性和结构复杂度上又有其独特的优势。
Matlab/Simulink 模型搭建
在 Matlab/Simulink 中搭建双向 Buck - Boost 电路模型是验证控制策略的重要手段。我们可以利用 Simulink 中的各种模块来搭建电路拓扑,比如电源模块、开关模块、电感电容模块等。同时,将前面提到的滑模控制算法以及电流内环电压外环控制策略以 S 函数或者模块的形式嵌入到模型中。通过设置不同的参数和输入条件,观察输出结果,分析系统的性能。
比如搭建一个简单的开环双向 Buck - Boost 电路模型,只需连接好电源、开关、电感、电容和负载等基本模块,设置好参数就能运行。而闭环模型则需要加入反馈环节,将输出电压和电流反馈到控制模块,实现对电路的精确控制。
总之,滑模控制在双向 Buck - Boost 升降压斩波电路中的应用,结合电流内环电压外环控制策略,通过 Matlab/Simulink 模型的辅助分析,为我们设计高效稳定的电力电子变换系统提供了有力的工具和方法。无论是在新能源发电、电动汽车充电还是其他相关领域,这些技术都有着广阔的应用前景。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 12
12 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)