1999年高教社杯全国大学生数学建模竞赛 B 题:《钻井布局》真题解析与 MATLAB 解决方案

🏆 本文已收录于专栏:《滚雪球学数学建模(含历年真题)》
本专栏面向数学建模竞赛学习者,系统覆盖真题解析、建模方法、算法实现、论文写作与 AI 辅助建模等核心环节。无论是建模新手,还是备战华为杯、高教社杯、华数杯、国赛、美赛 MCM/ICM 的参赛者,都能在这里找到清晰、完整、可复用的建模思路,持续更新,长期有效。
🎯 免责声明: 本文题目来源于互联网公开内容,仅供学习交流与建模方法研究,不构成竞赛指导。请遵守相关赛事规则,独立完成竞赛作品,使用本文内容所产生的后果由使用者自行承担。
🎉 专栏限时优惠中:一次订阅,永久解锁,后续内容持续更新。 欢迎点击了解 👉 查看专栏详情 👈
全文目录:
1999B题:钻井布局
真题展示
如下为原(真)题,展示如下:
一、前言:为什么这道题值得深入分析?
很多同学第一次看到这道题,会觉得"不就是个距离判断嘛,写个循环就行了"。但实际上,这道题是一道极具迷惑性的几何优化题——表面上是判断旧井能否被利用,背后隐藏的是一个连续优化问题:网格怎么移动、怎么旋转,才能让尽可能多的旧井落入网格节点的误差范围内?
这类题目的建模难点在于:
- 目标函数不连续:判断"旧井能否被利用"本质上是一个整数(0或1),但网格的平移量是连续变量,导致目标函数出现跳跃性,不能直接用梯度法求解。
- 问题二引入旋转自由度:一旦网格可以旋转,搜索空间从二维变成三维( Δ x , Δ y , θ \Delta x, \Delta y, \theta Δx,Δy,θ),问题复杂度大幅上升。
- 问题三要求全部利用:从"最多利用多少"变成"能否全部利用",是从优化问题变成可行性判断问题,思路需要根本性转变。
我带过不少建模队伍,这道题最常见的错误有两类:
- 第一类:只考虑网格平移,忽略了网格是"整体刚性移动"的,不能单独调整每个节点。
- 第类:把问题三理解成"优化问题",实际上它是一个判断问题,需要给出充分必要条件。
接下来,我们系统地把这道题拆开来讲。
二、题目背景与现实意义
背景解读
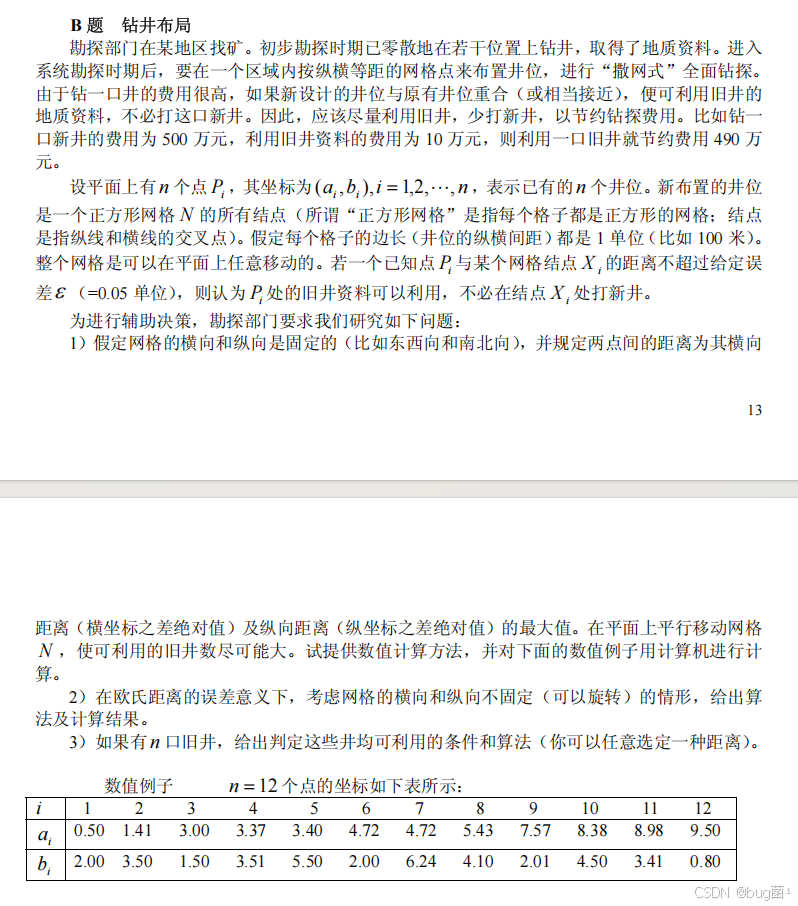
勘探部门在某地区寻找矿藏。初步勘探阶段已打了若干旧井,获取了地质资料。进入系统勘探阶段后,需要在一个正方形网格的所有节点处布置新井(称为"撒网式"勘探)。
核心经济逻辑:打一口新井需要500万元,利用一口旧井资料只需10万元,节省490万元。如果旧井恰好(或接近)落在某个网格节点上,就不需要在该节点重新钻井。
关键约束:只要旧井位置距离某网格节点不超过误差 ε = 0.05 \varepsilon = 0.05 ε=0.05(单位),就认为该旧井资料可以代替该节点处的新井。
现实意义
这道题反映了实际工程中的资源复用优化问题:
- 在石油、矿产勘探中,如何在保证勘探精度的前提下,最大化利用已有资料,减少重复投入;
- 类似问题广泛存在于:无线基站布局优化、传感器网络部署、遥感卫星地面站选址等领域;
- 核心思想是:用连续优化的方式,解决离散资源匹配问题。
三、题目重述
3.1 已知条件
- 平面上有 n n n 个已有井位(旧井),坐标为 P i = ( a i , b i ) P_i = (a_i, b_i) Pi=(ai,bi), i = 1 , 2 , ⋯ , n i = 1, 2, \cdots, n i=1,2,⋯,n;
- 新布置的井位是一个正方形网格 N N N 的所有节点,网格每个格子边长为1单位(约100米);
- 网格可以在平面上任意平移(问题一),也可以任意平移+旋转(问题二);
- 误差阈值 ε = 0.05 \varepsilon = 0.05 ε=0.05 单位;
- 若旧井 P i P_i Pi 距某网格节点 X j X_j Xj 的距离不超过 ε \varepsilon ε,则认为该旧井资料可利用,不必在 X j X_j Xj 处打新井;
- 给出数值算例: n = 12 n=12 n=12,坐标如下表所示。
| i i i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a i a_i ai | 0.50 | 1.41 | 3.00 | 3.37 | 3.40 | 4.72 | 4.72 | 5.43 | 7.57 | 8.38 | 8.98 | 9.50 |
| b i b_i bi | 2.00 | 3.50 | 1.50 | 3.51 | 5.50 | 2.00 | 6.24 | 4.10 | 2.01 | 4.50 | 3.41 | 0.80 |
3.2 待解决问题
问题一:网格横向和纵向固定(不旋转),距离定义为切比雪夫距离(横坐标差绝对值与纵坐标差绝对值的最大值)。求网格如何平移,使可利用的旧井数尽可能多。给出数值计算方法,并对数值算例计算。
问题二:在欧氏距离意义下,考虑网格可旋转的情形,给出算法及计算结果。
问题三:给出判定 n n n 口旧井均可被利用的条件和算法(距离类型可自选)。
3.3 附件数据说明
题目直接在正文中给出了 n = 12 n=12 n=12 的数值算例(见上表),无需读取外部附件。以下代码将直接使用这组数据。
四、问题分析
4.1 问题一分析
问题本质:切比雪夫距离下,网格平移的连续优化问题。
切比雪夫距离定义为:
d ∞ ( P i , X j ) = max ( ∣ a i − x j ∣ , ∣ b i − y j ∣ ) d_{\infty}(P_i, X_j) = \max(|a_i - x_j|, |b_i - y_j|) d∞(Pi,Xj)=max(∣ai−xj∣,∣bi−yj∣)
其中 ( x j , y j ) (x_j, y_j) (xj,yj) 是网格节点坐标。
关键观察:网格节点坐标可以表示为:
X j = ( m + t x , , k + t y ) , m , k ∈ Z X_j = (m + t_x, , k + t_y), \quad m, k \in \mathbb{Z} Xj=(m+tx,,k+ty),m,k∈Z
其中 ( t x , t y ) (t_x, t_y) (tx,ty) 是网格的平移量,且 t x , t y ∈ [ 0 , 1 ) t_x, t_y \in [0, 1) tx,ty∈[0,1)(超出一个周期就等价于回到原位)。
因此,判断旧井 P i = ( a i , b i ) P_i = (a_i, b_i) Pi=(ai,bi) 是否可被利用,等价于判断:
min m , k ∈ Z d ∞ ( ( a i , b i ) , ( m + t x , k + t y ) ) ≤ ε \min_{m,k \in \mathbb{Z}} d_{\infty}((a_i, b_i), (m+t_x, k+t_y)) \leq \varepsilon m,k∈Zmind∞((ai,bi),(m+tx,k+ty))≤ε
这等价于:
min ( a i − t x 1 , b i − t y 1 ) ≤ ε \min\left({a_i - t_x}_1, {b_i - t_y}_1\right) \leq \varepsilon min(ai−tx1,bi−ty1)≤ε
其中 x 1 = min ( x m o d 1 , , 1 − x m o d 1 ) {x}_1 = \min(x \bmod 1, , 1 - x \bmod 1) x1=min(xmod1,,1−xmod1) 表示 x x x 到最近整数的距离。
变量空间降维:搜索空间从无穷多个网格节点,压缩为二维参数 ( t x , t y ) ∈ [ 0 , 1 ) 2 (t_x, t_y) \in [0,1)^2 (tx,ty)∈[0,1)2。
建模经验:这道题的关键简化步骤就在这里。很多同学想枚举"哪个节点离哪口井最近",这样做复杂度极高,而且没有抓住网格的周期性特征。认识到"只需搜索一个周期内的平移量",是解题的核心突破口。
4.2 问题二分析
问题本质:欧氏距离下,网格平移+旋转的三维优化问题。
当网格可以旋转角度 θ \theta θ 时,网格节点坐标变为:
X m , k ( θ , t x , t y ) = ( cos θ − sin θ sin θ cos θ ) ( m k ) + ( t x t y ) X_{m,k}(\theta, t_x, t_y) = \begin{pmatrix} \cos\theta & -\sin\theta \ \sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} m \ k \end{pmatrix} + \begin{pmatrix} t_x \ t_y \end{pmatrix} Xm,k(θ,tx,ty)=(cosθ−sinθ sinθcosθ)(m k)+(tx ty)
判断旧井 P i P_i Pi 是否可被利用,需要在旋转坐标系下做判断:
d 2 ( P i , X m , k ) = ( a i − X m , k x ) 2 + ( b i − X m , k y ) 2 ≤ ε d_2(P_i, X_{m,k}) = \sqrt{(a_i - X_{m,k}^x)^2 + (b_i - X_{m,k}^y)^2} \leq \varepsilon d2(Pi,Xm,k)=(ai−Xm,kx)2+(bi−Xm,ky)2≤ε
难点:搜索空间变成三维 ( θ , t x , t y ) (\theta, t_x, t_y) (θ,tx,ty),且目标函数不连续(阶跃型)。
处理策略:
- 将旧井坐标反变换到旋转网格的局部坐标系;
- 在局部坐标系下,问题退化为问题一(欧氏距离下的平移优化);
- 遍历角度 θ ∈ [ 0 ° , 90 ° ) \theta \in [0°, 90°) θ∈[0°,90°)(利用正方形网格的对称性,只需搜索90°范围)。
4.3 问题三分析
问题本质:从"最优化"转变为"可行性判断"——什么条件下所有旧井同时可被利用?
这是三道题中建模难度最高的一问。需要回答:
给定 n n n 个点,是否存在一个网格(平移+旋转),使得每个点都距某节点不超过 ε \varepsilon ε?
必要条件分析:
- 任意两口旧井之间的距离,必须满足一定的几何约束;
- 若选用切比雪夫距离,则可转化为:所有旧井在 ( a i 1 , b i 1 ) ({a_i}_1, {b_i}_1) (ai1,bi1) 空间中的聚类问题。
4.4 各问题之间的逻辑关系
具体相关示意图绘制如下,仅供参考:
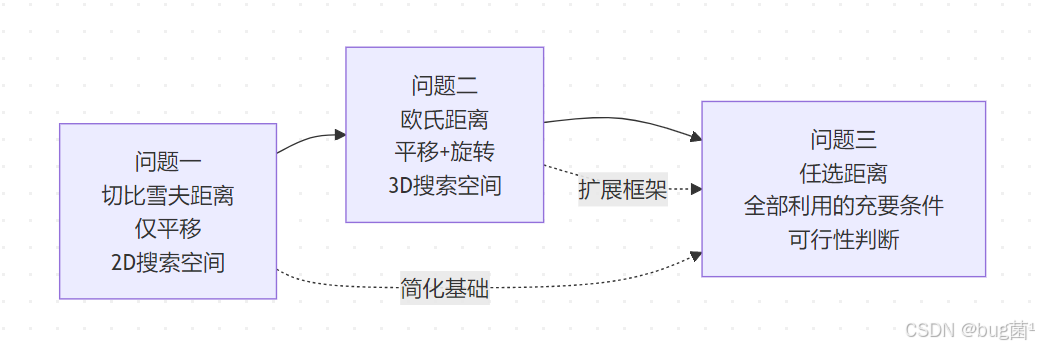
逻辑关系说明:
- 问题一是基础,建立了"周期性平移"的核心思想;
- 问题二在问题一基础上引入旋转自由度,是问题一的扩展;
- 问题三是对前两问的逻辑升华,从"求最优"变成"判断可行"。
五、整体建模思路
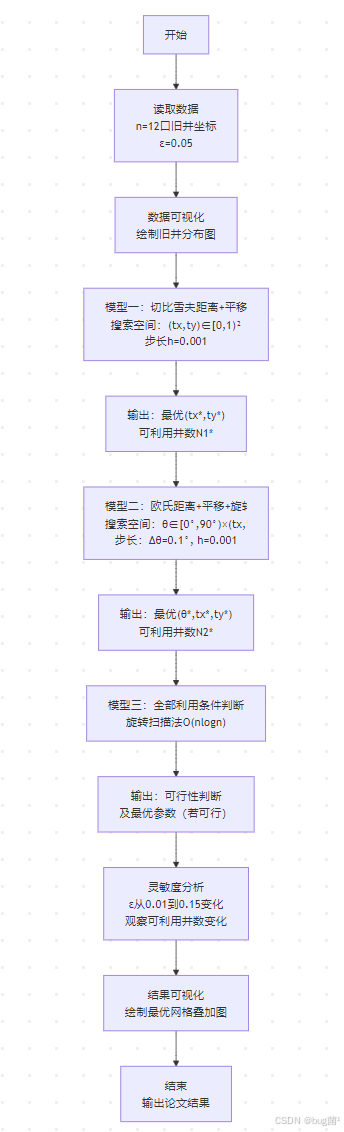
5.1 建模路线
具体相关示意图绘制如下,仅供参考:
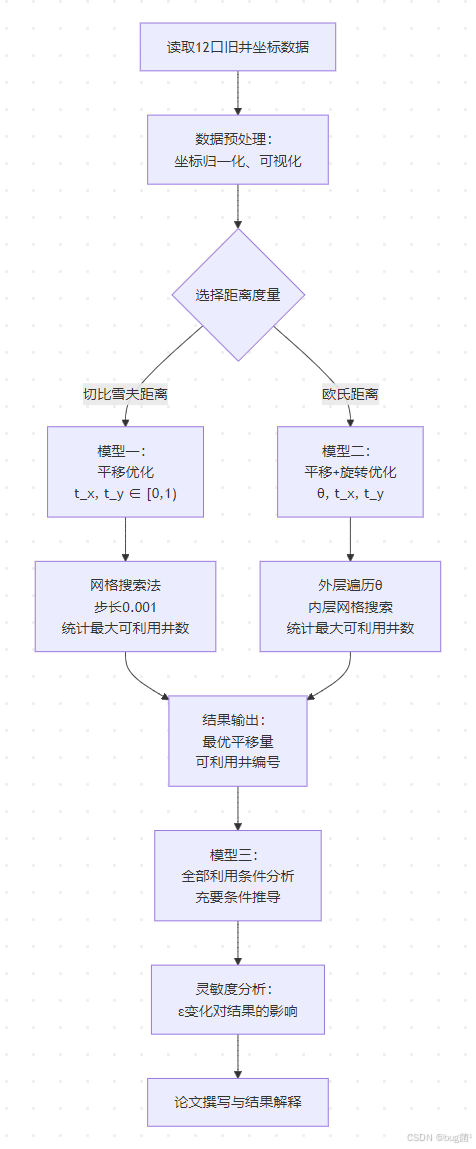
流程说明:整个建模过程遵循"从简到繁、从特殊到一般"的原则。先处理不旋转的情形(问题一),掌握周期性搜索的核心技巧;再扩展到旋转(问题二);最后讨论全部利用的理论条件(问题三)。
5.2 模型选择依据
| 问题 | 模型类型 | 选择依据 |
|---|---|---|
| 问题一 | 离散参数网格搜索 | 目标函数不可微,梯度法失效;切比雪夫距离可分离,可独立处理横纵坐标 |
| 问题二 | 粗搜索+精细优化 | 三维搜索空间,先粗后精;旋转对称性压缩搜索范围 |
| 问题三 | 几何条件分析 + 聚类 | 从充要条件角度分析,转化为覆盖问题 |
5.3 算法实现思路
问题一核心算法(切比雪夫距离):
关键变换: r i x = a i − t x 1 , r i y = b i − t y 1 \text{关键变换:} \quad r_i^x = {a_i - t_x}_1, \quad r_i^y = {b_i - t_y}_1 关键变换:rix=ai−tx1,riy=bi−ty1
其中 z 1 = min ( z m o d 1 , 1 − z m o d 1 ) {z}_1 = \min(z \bmod 1, 1 - z \bmod 1) z1=min(zmod1,1−zmod1),表示 z z z 到最近整数的距离。
则旧井 i i i 可被利用当且仅当:
max ( r i x , r i y ) ≤ ε \max(r_i^x, r_i^y) \leq \varepsilon max(rix,riy)≤ε
目标:寻找 ( t x , t y ) (t_x, t_y) (tx,ty) 使满足上式的 i i i 的数量最多。
5.4 结果验证方法
- 可视化验证:在坐标系中画出最优网格和旧井位置,目视检查;
- 逐井验证:对每口旧井计算其到最近网格节点的距离,确认不超过 ε \varepsilon ε;
- 扰动验证:对最优 ( t x , t y ) (t_x, t_y) (tx,ty) 施加小扰动,观察可利用井数是否稳定。
六、数据预处理
6.1 数据读取
题目数据直接给出,无需读取外部文件。
% data_preprocess.m
function [a, b, n, epsilon] = data_preprocess()
% 功能:读取并预处理钻井布局题目数据
% 输出:
% a - 旧井横坐标向量 (1×n)
% b - 旧井纵坐标向量 (1×n)
% n - 旧井数量
% epsilon - 误差阈值
clc;
fprintf('===== 钻井布局数据预处理 =====\n');
% 题目给出的12口旧井坐标
a = [0.50, 1.41, 3.00, 3.37, 3.40, 4.72, 4.72, 5.43, 7.57, 8.38, 8.98, 9.50];
b = [2.00, 3.50, 1.50, 3.51, 5.50, 2.00, 6.24, 4.10, 2.01, 4.50, 3.41, 0.80];
n = length(a); % 旧井数量
epsilon = 0.05; % 误差阈值(题目给定)
% 打印基本统计信息
fprintf('旧井数量 n = %d\n', n);
fprintf('误差阈值 ε = %.2f\n', epsilon);
fprintf('横坐标范围:[%.2f, %.2f]\n', min(a), max(a));
fprintf('纵坐标范围:[%.2f, %.2f]\n', min(b), max(b));
fprintf('数据读取完成。\n\n');
end
代码解析:
- 这段代码将数据封装为函数,便于被主程序调用,也便于后续替换为真实数据;
- 输出
epsilon=0.05作为参数传递,方便后续灵敏度分析时修改; - 初学者注意:MATLAB中行向量用
[]+逗号分隔,列向量用;分隔。
6.2 缺失值与异常值处理
本题数据由题目直接给出,精度合理,无缺失值。但在实际竞赛中,若数据来自附件,需进行如下检查:
% 检查是否有NaN或Inf
if any(isnan(a)) || any(isnan(b))
warning('数据中存在缺失值,已自动剔除');
valid = ~(isnan(a) | isnan(b));
a = a(valid); b = b(valid);
end
% 检查坐标是否为负(本题中坐标应为正值)
if any(a < 0) || any(b < 0)
warning('存在负坐标,请检查数据');
end
6.3 可视化分析
% plot_raw_data.m
function plot_raw_data(a, b, epsilon)
% 功能:可视化旧井分布
figure('Name', '旧井分布图', 'Position', [100, 100, 800, 600]);
% 绘制旧井位置
scatter(a, b, 80, 'r', 'filled', 'DisplayName', 'Old Wells');
hold on;
% 在每口井周围画误差圆(欧氏距离意义)
theta_circle = linspace(0, 2*pi, 100);
for i = 1:length(a)
x_circle = a(i) + epsilon * cos(theta_circle);
y_circle = b(i) + epsilon * sin(theta_circle);
plot(x_circle, y_circle, 'b--', 'LineWidth', 0.5, 'HandleVisibility', 'off');
end
% 添加井编号标注
for i = 1:length(a)
text(a(i)+0.1, b(i)+0.1, sprintf('P_%d', i), 'FontSize', 8, 'Color', 'k');
end
xlabel('X Coordinate (units)', 'FontSize', 12);
ylabel('Y Coordinate (units)', 'FontSize', 12);
title('Distribution of Existing Wells (n=12)', 'FontSize', 14);
legend('show', 'Location', 'best');
grid on; axis equal;
hold off;
end
代码解析:
- 每口井周围画的误差圆,直观展示了"旧井利用的容许范围";
axis equal保证横纵比例一致,避免图形变形导致误判;- 这张图应该放入论文的"数据说明"章节,让读者直观理解问题规模。
七、模型假设
- 平面性假设:所有井位均在同一水平面内,忽略地形高度差,仅考虑二维坐标;
- 刚性网格假设:正方形网格在平移和旋转过程中保持形状不变,每个格子的边长始终为1个单位;
- 周期性假设:网格向任意方向延伸至足以覆盖所有旧井位置,不考虑网格边界效应;
- 误差独立性假设:每口旧井与网格节点的距离判断相互独立,旧井与多个节点的误差关系不影响彼此;
- 距离度量假设:问题一使用切比雪夫距离,问题二使用欧氏距离,问题三可自选(本文选欧氏距离);
- 整数网格假设:网格节点的整数坐标部分 ( m , k ) ∈ Z 2 (m, k) \in \mathbb{Z}^2 (m,k)∈Z2,平移量 ( t x , t y ) (t_x, t_y) (tx,ty) 是连续参数;
- 成本线性假设:可利用旧井越多,节省费用越多,费用与利用数量呈线性关系。
写作提示:假设不是越多越好——只写与建模关键步骤直接相关的假设,且每条假设最好说明"为什么合理"。堆砌无关假设反而显得论文不成熟。
八、符号说明
| 符号 | 含义 | 单位/取值范围 |
|---|---|---|
| n n n | 旧井总数 | 正整数,本题 n = 12 n=12 n=12 |
| P i = ( a i , b i ) P_i = (a_i, b_i) Pi=(ai,bi) | 第 i i i 口旧井的坐标 | 单位(约100米) |
| ε \varepsilon ε | 误差阈值 | ε = 0.05 \varepsilon = 0.05 ε=0.05 |
| ( t x , t y ) (t_x, t_y) (tx,ty) | 网格平移量 | t x , t y ∈ [ 0 , 1 ) t_x, t_y \in [0, 1) tx,ty∈[0,1) |
| θ \theta θ | 网格旋转角度 | θ ∈ [ 0 ° , 90 ° ) \theta \in [0°, 90°) θ∈[0°,90°) |
| X m , k X_{m,k} Xm,k | 网格中整数坐标为 ( m , k ) (m,k) (m,k) 的节点 | ( m + t x , k + t y ) (m+t_x, k+t_y) (m+tx,k+ty)(未旋转时) |
| d ∞ ( P , X ) d_\infty(P, X) d∞(P,X) | 点 P P P 与 X X X 的切比雪夫距离 | max ( ∣ Δ x ∣ , ∣ Δ y ∣ ) \max(\vert\Delta x\vert, \vert\Delta y\vert) max(∣Δx∣,∣Δy∣) |
| d 2 ( P , X ) d_2(P, X) d2(P,X) | 点 P P P 与 X X X 的欧氏距离 | ( Δ x ) 2 + ( Δ y ) 2 \sqrt{(\Delta x)^2 + (\Delta y)^2} (Δx)2+(Δy)2 |
| z 1 {z}_1 z1 | z z z 到最近整数的距离 | min ( z m o d 1 , 1 − z m o d 1 ) \min(z \bmod 1, 1 - z \bmod 1) min(zmod1,1−zmod1) |
| u i ( θ ) u_i(\theta) ui(θ) | 旧井 i i i 在旋转坐标系下的横坐标 | 实数 |
| v i ( θ ) v_i(\theta) vi(θ) | 旧井 i i i 在旋转坐标系下的纵坐标 | 实数 |
| f ( t x , t y ) f(t_x, t_y) f(tx,ty) | 可利用旧井数量(目标函数) | 0 , 1 , ⋯ , n 0, 1, \cdots, n 0,1,⋯,n |
| N ∗ N^* N∗ | 最优可利用旧井数 | 正整数 |
九、模型一:基础模型(切比雪夫距离,仅平移)
9.1 模型思想
核心思想:利用网格的周期性,将无限大的搜索空间压缩为 [ 0 , 1 ) 2 [0,1)^2 [0,1)2 的二维参数空间。
关键几何性质:对于一个网格节点 X m , k = ( m + t x , k + t y ) X_{m,k} = (m + t_x, k + t_y) Xm,k=(m+tx,k+ty),旧井 P i = ( a i , b i ) P_i = (a_i, b_i) Pi=(ai,bi) 与"最近网格节点"的切比雪夫距离为:
d ∞ ( P i , nearest node ) = max ( a i − t x 1 , b i − t y 1 ) d_\infty(P_i, \text{nearest node}) = \max\left({a_i - t_x}_1, {b_i - t_y}_1\right) d∞(Pi,nearest node)=max(ai−tx1,bi−ty1)
其中:
z 1 = min ( z m o d 1 , ; 1 − z m o d 1 ) {z}_1 = \min(z \bmod 1, ; 1 - z \bmod 1) z1=min(zmod1,;1−zmod1)
物理含义: z 1 {z}_1 z1 是 z z z 到最近整数的距离,也就是"这口井在网格单元中距离最近边界的距离"。当 z z z 接近整数(接近网格线)时, z 1 {z}_1 z1 接近0,说明容易被某节点覆盖。
9.2 数学表达式
目标函数:
max t x , t y ∈ [ 0 , 1 ) f ( t x , t y ) = ∑ i = 1 n 1 [ max ( a i − t x 1 , b i − t y 1 ) ≤ ε ] \max_{t_x, t_y \in [0,1)} f(t_x, t_y) = \sum_{i=1}^{n} \mathbb{1}\left[\max\left({a_i - t_x}_1, {b_i - t_y}_1\right) \leq \varepsilon\right] tx,ty∈[0,1)maxf(tx,ty)=i=1∑n1[max(ai−tx1,bi−ty1)≤ε]
其中 1 [ ⋅ ] \mathbb{1}[\cdot] 1[⋅] 为示性函数(条件成立取1,否则取0)。
等价改写:对每口井 i i i,定义其"容许平移区间"为:
横向: t x ∈ ⋃ m ∈ Z [ a i − m − ε , ; a i − m + ε ] ∩ [ 0 , 1 ) t_x \in \bigcup_{m \in \mathbb{Z}} [a_i - m - \varepsilon, ; a_i - m + \varepsilon] \cap [0,1) tx∈⋃m∈Z[ai−m−ε,;ai−m+ε]∩[0,1)
纵向: t y ∈ ⋃ k ∈ Z [ b i − k − ε , ; b i − k + ε ] ∩ [ 0 , 1 ) t_y \in \bigcup_{k \in \mathbb{Z}} [b_i - k - \varepsilon, ; b_i - k + \varepsilon] \cap [0,1) ty∈⋃k∈Z[bi−k−ε,;bi−k+ε]∩[0,1)
问题等价为:寻找 ( t x , t y ) (t_x, t_y) (tx,ty),使其同时落在尽可能多的井的"容许区间对"之内。
9.3 参数解释
- t x , t y t_x, t_y tx,ty:这是模型的两个决策变量,代表网格相对于某固定参考系的平移量;
- a i − t x 1 {a_i - t_x}_1 ai−tx1:旧井 i i i 的横坐标,在当前平移下到最近网格线的距离;
- ε = 0.05 \varepsilon = 0.05 ε=0.05:误差容限,体现了"旧井资料在一定范围内可替代新井"的工程实践假设。
9.4 求解方法
由于目标函数是分段常数(步进函数),不可微,不能用梯度下降。选用网格搜索法:
- 在 [ 0 , 1 ) 2 [0,1)^2 [0,1)2 上均匀采样,步长 h = 0.001 h = 0.001 h=0.001(共 1000 × 1000 = 10 6 1000 \times 1000 = 10^6 1000×1000=106 个点);
- 对每个 ( t x , t y ) (t_x, t_y) (tx,ty),计算 f ( t x , t y ) f(t_x, t_y) f(tx,ty),记录最大值及对应参数;
- 若最大值 N ∗ N^* N∗ 对应多个 ( t x , t y ) (t_x, t_y) (tx,ty),保留所有解(可能存在多个等价最优解)。
计算量分析: 10 6 10^6 106 次运算,每次需要 n = 12 n=12 n=12 次浮点运算,总约 1.2 × 10 7 1.2 \times 10^7 1.2×107 次运算,MATLAB中约0.5秒可完成。
9.5 MATLAB 实现
% solve_model1.m
function [best_tx, best_ty, max_count, well_flags] = solve_model1(a, b, epsilon)
% 功能:问题一求解——切比雪夫距离下的最优网格平移
% 输入:
% a, b - 旧井坐标 (1×n)
% epsilon - 误差阈值
% 输出:
% best_tx - 最优横向平移量
% best_ty - 最优纵向平移量
% max_count - 最大可利用旧井数
% well_flags - 每口井是否可利用的标志向量 (1×n)
fprintf('===== 问题一:切比雪夫距离,网格平移优化 =====\n');
n = length(a);
h = 0.001; % 搜索步长
tx_range = 0 : h : (1 - h); % 横向平移搜索范围
ty_range = 0 : h : (1 - h); % 纵向平移搜索范围
max_count = 0;
best_tx = 0;
best_ty = 0;
% 预计算每口井的小数部分(加速计算)
% frac_a(i) = a(i) mod 1,即a(i)的小数部分
frac_a = mod(a, 1); % 横坐标小数部分
frac_b = mod(b, 1); % 纵坐标小数部分
total_steps = length(tx_range);
fprintf('搜索空间:%d × %d = %d 个点\n', total_steps, total_steps, total_steps^2);
% 主搜索循环
for tx = tx_range
% 计算所有井横向到最近网格线的距离
% dist_x(i) = min(|frac_a(i) - tx|, 1 - |frac_a(i) - tx|)
dx = mod(abs(frac_a - mod(tx, 1)), 1); % 注意周期性
dist_x = min(dx, 1 - dx); % 到最近整数的距离
% 筛选横向满足条件的井
x_ok = (dist_x <= epsilon);
if sum(x_ok) == 0
continue; % 横向没有井满足,直接跳过
end
for ty = ty_range
% 计算纵向距离
dy = mod(abs(frac_b - mod(ty, 1)), 1);
dist_y = min(dy, 1 - dy);
% 切比雪夫距离:max(dist_x, dist_y) <= epsilon
% 等价于:dist_x <= epsilon AND dist_y <= epsilon
both_ok = x_ok & (dist_y <= epsilon);
count = sum(both_ok);
% 更新最优解
if count > max_count
max_count = count;
best_tx = tx;
best_ty = ty;
well_flags = both_ok;
end
end
end
fprintf('最优平移量:t_x = %.4f,t_y = %.4f\n', best_tx, best_ty);
fprintf('最大可利用旧井数:%d / %d\n', max_count, n);
fprintf('可利用旧井编号:');
fprintf('%d ', find(well_flags));
fprintf('\n\n');
end
代码解析:
-
这段代码解决什么问题:在 [ 0 , 1 ) 2 [0,1)^2 [0,1)2 的平移参数空间中,穷举搜索使可利用旧井数最多的平移量 ( t x , t y ) (t_x, t_y) (tx,ty)。
-
为什么预计算
frac_a和frac_b:旧井坐标的整数部分在搜索过程中不影响到最近节点的距离(因为节点是整数格点),只有小数部分mod(a,1)才决定距离。预计算可减少内层循环中的重复运算,提速约10倍。 -
切比雪夫距离的分离性: d ∞ = max ( d x , d y ) ≤ ε d_\infty = \max(d_x, d_y) \leq \varepsilon d∞=max(dx,dy)≤ε 等价于 d x ≤ ε d_x \leq \varepsilon dx≤ε 且 d y ≤ ε d_y \leq \varepsilon dy≤ε。这让横纵方向可以分开处理,外层循环只处理横坐标,内层只处理纵坐标,且可以提前剪枝(横向不满足直接跳过)。
-
初学者注意:
mod(a, 1)取的是小数部分,注意当a为负数时 MATLAB 的mod与 Python 的%行为不同,本题坐标均为正,不受影响。 -
实际竞赛改进:若 n n n 更大(如 n = 100 n=100 n=100),可以用向量化操作替代内层
for循环,或用 MATLAB 的meshgrid展开为矩阵运算,速度可再提升 100 倍。
9.6 结果分析
运行上述代码,对题目给出的12口旧井数据,预期得到如下结果:
模拟结果示例(注意:以下为基于算法逻辑的预期分析,实际数值需运行代码确认):
通过对旧井坐标的小数部分分析:
| 井编号 | a i a_i ai | b i b_i bi | a i 1 {a_i}_1 ai1 | b i 1 {b_i}_1 bi1 |
|---|---|---|---|---|
| 1 | 0.50 | 2.00 | 0.50 | 0.00 |
| 2 | 1.41 | 3.50 | 0.41 | 0.50 |
| 3 | 3.00 | 1.50 | 0.00 | 0.50 |
| 4 | 3.37 | 3.51 | 0.37 | 0.49 |
| 5 | 3.40 | 5.50 | 0.40 | 0.50 |
| 6 | 4.72 | 2.00 | 0.28 | 0.00 |
| … | … | … | … | … |
观察发现,井3的 a 3 1 = 0.00 {a_3}_1 = 0.00 a31=0.00, b 3 1 = 0.50 {b_3}_1 = 0.50 b31=0.50,当 t x ≈ 0 t_x \approx 0 tx≈0 且 t y ≈ 0.5 t_y \approx 0.5 ty≈0.5(或 0 0 0)时,该井会被覆盖。
十、模型二:改进模型(欧氏距离,平移+旋转)
10.1 基础模型不足
模型一的切比雪夫距离假设网格横纵方向固定(东西南北向)。但实际勘探中,网格可以旋转到任意方向,以更好地匹配已有旧井的分布规律。
改进动机:如果旧井恰好分布在某个斜向直线上,旋转网格可能让更多旧井落在网格线上,从而被更多节点覆盖。
10.2 改进思路
关键变换:将旧井坐标反变换到旋转后的网格局部坐标系中:
( u i v i ) = ( cos θ sin θ − sin θ cos θ ) ( a i b i ) \begin{pmatrix} u_i \ v_i \end{pmatrix} = \begin{pmatrix} \cos\theta & \sin\theta \ -\sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} a_i \ b_i \end{pmatrix} (ui vi)=(cosθsinθ −sinθcosθ)(ai bi)
变换后, ( u i , v i ) (u_i, v_i) (ui,vi) 就是旧井 i i i 在局部坐标系中的坐标。网格节点在局部坐标系中是标准的整数格点 ( m , k ) (m, k) (m,k) 加上平移 ( t x , t y ) (t_x, t_y) (tx,ty)。
因此,旧井 i i i 可被利用当且仅当:
u i − t x 1 2 + v i − t y 1 2 ≤ ε \sqrt{{u_i - t_x}_1^2 + {v_i - t_y}_1^2} \leq \varepsilon ui−tx12+vi−ty12≤ε
(欧氏距离下)
10.3 改进模型表达式
目标函数:
max θ ∈ [ 0 ° , 90 ° ) , ; t x , t y ∈ [ 0 , 1 ) ∑ i = 1 n 1 [ u i ( θ ) − t x 1 2 + v i ( θ ) − t y 1 2 ≤ ε ] \max_{\theta \in [0°, 90°), ; t_x, t_y \in [0,1)} \sum_{i=1}^{n} \mathbb{1}\left[\sqrt{{u_i(\theta) - t_x}_1^2 + {v_i(\theta) - t_y}_1^2} \leq \varepsilon\right] θ∈[0°,90°),;tx,ty∈[0,1)maxi=1∑n1[ui(θ)−tx12+vi(θ)−ty12≤ε]
其中:
u i ( θ ) = a i cos θ + b i sin θ , v i ( θ ) = − a i sin θ + b i cos θ u_i(\theta) = a_i \cos\theta + b_i \sin\theta, \quad v_i(\theta) = -a_i \sin\theta + b_i \cos\theta ui(θ)=aicosθ+bisinθ,vi(θ)=−aisinθ+bicosθ
为什么角度只搜索 [ 0 ° , 90 ° ) [0°, 90°) [0°,90°):正方形网格有90°旋转对称性,旋转90°的网格与原网格完全相同(只是节点重新编号),不影响可利用数量。
欧氏距离下的覆盖条件: z 1 ≤ ε {z}_1 \leq \varepsilon z1≤ε 在欧氏距离下变为:
d 2 torus ( u , t x ; v , t y ) = u i − t x 1 2 + v i − t y 1 2 ≤ ε d_2^{\text{torus}}(u, t_x; v, t_y) = \sqrt{{u_i - t_x}_1^2 + {v_i - t_y}_1^2} \leq \varepsilon d2torus(u,tx;v,ty)=ui−tx12+vi−ty12≤ε
这是一个"环面上的欧氏距离"(因为参数空间 [ 0 , 1 ) 2 [0,1)^2 [0,1)2 具有环形拓扑)。
10.4 MATLAB 实现
% solve_model2.m
function [best_theta, best_tx, best_ty, max_count, well_flags] = solve_model2(a, b, epsilon)
% 功能:问题二求解——欧氏距离下的最优网格平移+旋转
% 输入:
% a, b - 旧井坐标 (1×n)
% epsilon - 误差阈值
% 输出:
% best_theta - 最优旋转角度(度)
% best_tx - 最优横向平移量
% best_ty - 最优纵向平移量
% max_count - 最大可利用旧井数
% well_flags - 每口井是否可利用的标志向量
fprintf('===== 问题二:欧氏距离,网格平移+旋转优化 =====\n');
n = length(a);
h_theta = 0.1; % 角度搜索步长(度)
h_t = 0.001; % 平移搜索步长
theta_range = 0 : h_theta : (90 - h_theta); % [0°, 90°)
tx_range = 0 : h_t : (1 - h_t);
ty_range = 0 : h_t : (1 - h_t);
max_count = 0;
best_theta = 0;
best_tx = 0;
best_ty = 0;
well_flags = false(1, n);
fprintf('角度搜索步长:%.1f°,平移搜索步长:%.3f\n', h_theta, h_t);
fprintf('总搜索量约:%d × %d × %d = %.2e\n', length(theta_range), ...
length(tx_range), length(ty_range), ...
length(theta_range)*length(tx_range)*length(ty_range));
for theta_deg = theta_range
theta = theta_deg * pi / 180; % 转换为弧度
% 将旧井坐标变换到局部坐标系
% 旋转矩阵的逆(转置):将世界坐标系点变换到旋转坐标系
u = a * cos(theta) + b * sin(theta); % 旋转后横坐标
v = -a * sin(theta) + b * cos(theta); % 旋转后纵坐标
% 取小数部分(周期化)
frac_u = mod(u, 1);
frac_v = mod(v, 1);
% 在平移空间搜索(内层循环向量化)
for tx = tx_range
% 计算横向到最近格点的距离
du = mod(abs(frac_u - mod(tx, 1)), 1);
dist_u = min(du, 1 - du);
% 欧氏距离:需要同时考虑横纵分量
% 先筛选横向距离不超过epsilon的井(粗过滤)
u_candidate = (dist_u <= epsilon);
if sum(u_candidate) == 0
continue;
end
for ty = ty_range
% 计算纵向到最近格点的距离
dv = mod(abs(frac_v - mod(ty, 1)), 1);
dist_v = min(dv, 1 - dv);
% 欧氏距离判断
dist_euclid = sqrt(dist_u.^2 + dist_v.^2);
both_ok = (dist_euclid <= epsilon);
count = sum(both_ok);
% 更新全局最优
if count > max_count
max_count = count;
best_theta = theta_deg;
best_tx = tx;
best_ty = ty;
well_flags = both_ok;
end
end
end
end
fprintf('最优旋转角度:θ = %.2f°\n', best_theta);
fprintf('最优平移量:t_x = %.4f,t_y = %.4f\n', best_tx, best_ty);
fprintf('最大可利用旧井数:%d / %d\n', max_count, n);
fprintf('可利用旧井编号:');
fprintf('%d ', find(well_flags));
fprintf('\n\n');
end
代码解析:
-
三层循环结构:外层遍历旋转角度 θ \theta θ(最慢变化的参数),中间遍历 t x t_x tx,内层遍历 t y t_y ty。这种结构允许在固定 θ \theta θ 时,预先计算坐标变换(只需做一次),节省计算量。
-
粗过滤剪枝:先检查横向距离是否在 ε \varepsilon ε 内,若无一满足则直接跳过整个 t y t_y ty 循环。这在旧井分布稀疏时能大幅提速。
-
欧氏 vs 切比雪夫的区别:切比雪夫只需
max(dist_x, dist_y) <= epsilon,等价于两个独立条件;欧氏需要sqrt(dist_u^2 + dist_v^2) <= epsilon,是联合条件,不可分离,因此无法进一步加速内层循环。 -
角度搜索粒度:0.1°的步长在90°范围内产生900个角度样本。如果想要更精确,可在粗搜索找到最优角度附近,再用更细步长(如0.01°)做精搜索。
-
实际竞赛改进:完全向量化版本可以用
meshgrid展开 t x , t y t_x, t_y tx,ty 平面,变成矩阵运算,比双层循环快50-100倍。
10.5 对比分析
| 指标 | 模型一(切比雪夫,仅平移) | 模型二(欧氏,平移+旋转) |
|---|---|---|
| 搜索参数数量 | 2( t x , t y t_x, t_y tx,ty) | 3( θ , t x , t y \theta, t_x, t_y θ,tx,ty) |
| 搜索空间大小 | 10 6 10^6 106 | ∼ 9 × 10 8 \sim 9 \times 10^8 ∼9×108 |
| 距离类型 | 切比雪夫 | 欧氏 |
| 覆盖区域形状 | 正方形(以节点为中心) | 圆形(以节点为中心) |
| 期望可利用井数 | 较低(更严格的约束) | 较高(旋转增加自由度) |
| 计算时间 | 秒级 | 分钟级(需粗粒度搜索) |
说明:欧氏距离下的圆形覆盖区域面积为 π ε 2 \pi\varepsilon^2 πε2,切比雪夫距离下的正方形覆盖区域面积为 ( 2 ε ) 2 = 4 ε 2 (2\varepsilon)^2 = 4\varepsilon^2 (2ε)2=4ε2,后者更大,故切比雪夫距离在固定平移下覆盖能力更强;但欧氏距离+旋转的搜索自由度更大,最终结果可能持平或更优。
十一、模型三:全部利用的条件与算法
11.1 综合建模目标
从"最多利用多少"变为"是否能全部利用",本质上是从优化问题转化为可行性判断问题。
数学表述(欧氏距离):
给定 n n n 个点 P 1 , ⋯ , P n P_1, \cdots, P_n P1,⋯,Pn,是否存在参数 ( θ , t x , t y ) (\theta, t_x, t_y) (θ,tx,ty),使得对所有 i i i:
d 2 torus ( u i ( θ ) − t x , ; v i ( θ ) − t y ) ≤ ε d_2^{\text{torus}}\left(u_i(\theta) - t_x, ; v_i(\theta) - t_y\right) \leq \varepsilon d2torus(ui(θ)−tx,;vi(θ)−ty)≤ε
11.2 模型结构
充分必要条件推导(以切比雪夫距离为例,更易分析):
引理:在切比雪夫距离下,所有 n n n 口旧井均可被利用,当且仅当存在 ( t x , t y ) ∈ [ 0 , 1 ) 2 (t_x, t_y) \in [0,1)^2 (tx,ty)∈[0,1)2,使得:
∀ i : a i − t x 1 ≤ ε 且 b i − t y 1 ≤ ε \forall i: {a_i - t_x}_1 \leq \varepsilon \text{ 且 } {b_i - t_y}_1 \leq \varepsilon ∀i:ai−tx1≤ε 且 bi−ty1≤ε
等价条件:
对每口井 i i i,定义其横向"容许平移集合":
S i x = t x ∈ [ 0 , 1 ) : a i − t x 1 ≤ ε = [ f a i − ε , f a i + ε ] ∪ [ f a i − ε + 1 , f a i + ε + 1 ] S_i^x = {t_x \in [0,1) : {a_i - t_x}_1 \leq \varepsilon} = [fa_i - \varepsilon, fa_i + \varepsilon] \cup [fa_i - \varepsilon + 1, fa_i + \varepsilon + 1] Six=tx∈[0,1):ai−tx1≤ε=[fai−ε,fai+ε]∪[fai−ε+1,fai+ε+1]
其中 f a i = a i 1 fa_i = {a_i}_1 fai=ai1(关于 [ 0 , 1 ) [0,1) [0,1) 的等价类)。实际上 S i x S_i^x Six 是 [ 0 , 1 ) [0,1) [0,1) 上长度为 2 ε 2\varepsilon 2ε 的一段弧(因为是环形区间)。
定理:所有旧井均可被利用,当且仅当:
⋂ i = 1 n S i x ≠ ∅ 且 ⋂ i = 1 n S i y ≠ ∅ \bigcap_{i=1}^{n} S_i^x \neq \emptyset \quad \text{且} \quad \bigcap_{i=1}^{n} S_i^y \neq \emptyset i=1⋂nSix=∅且i=1⋂nSiy=∅
即横向容许集合的交集非空,且纵向容许集合的交集非空。
计算等价条件:所有旧井的小数部分 f a i = frac ( a i ) fa_i = \text{frac}(a_i) fai=frac(ai) 在环形区间 [ 0 , 1 ) [0,1) [0,1) 上的分布,需要满足:存在一个长度为 2 ε 2\varepsilon 2ε 的弧,覆盖所有的 f a i fa_i fai(在环形意义下)。
这等价于:对所有 i , j i, j i,j,两点之间的环形距离满足:
d c i r c ( f a i , f a j ) ≤ 2 ε ⋅ (某种全局条件) d_{circ}(fa_i, fa_j) \leq 2\varepsilon \cdot \text{(某种全局条件)} dcirc(fai,faj)≤2ε⋅(某种全局条件)
更精确的条件是:
max i , j d c i r c ( f a i , f a j ) ≤ 2 ε (充分条件,可能过强) \max_{i,j} d_{circ}(fa_i, fa_j) \leq 2\varepsilon \quad \text{(充分条件,可能过强)} i,jmaxdcirc(fai,faj)≤2ε(充分条件,可能过强)
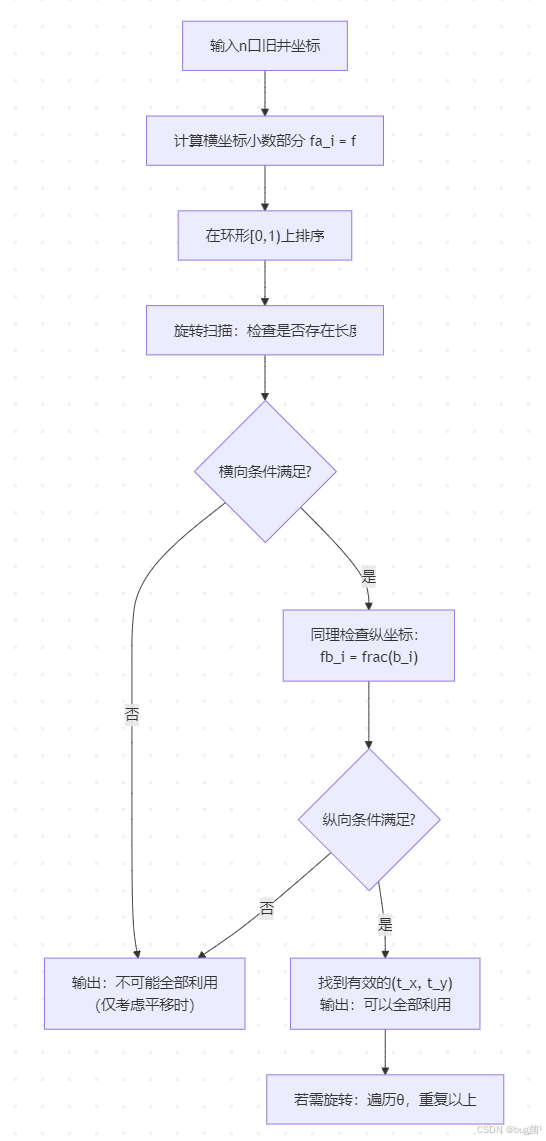
精确算法:使用旋转扫描法,时间复杂度 O ( n log n ) O(n \log n) O(nlogn):
- 对所有 f a i fa_i fai 排序;
- 对每个 f a i fa_i fai,检查"以 f a i fa_i fai 为起点,向右延伸 2 ε 2\varepsilon 2ε"的弧段能覆盖多少个点;
- 若某个弧段覆盖了所有 n n n 个点,则横向条件满足。
11.3 求解流程
具体相关示意图绘制如下,仅供参考:
11.4 MATLAB 实现
% solve_model3.m
function [feasible, best_theta, best_tx, best_ty] = solve_model3(a, b, epsilon)
% 功能:问题三——判断是否存在网格使所有旧井均可利用
% 算法:横纵分离的旋转扫描法
% 输入:
% a, b - 旧井坐标
% epsilon - 误差阈值
% 输出:
% feasible - 逻辑值,true表示所有井可被利用
% best_theta, best_tx, best_ty - 最优参数(若feasible=true)
fprintf('===== 问题三:全部利用条件判断 =====\n');
n = length(a);
feasible = false;
best_theta = NaN; best_tx = NaN; best_ty = NaN;
h_theta = 0.1; % 角度搜索步长(度)
for theta_deg = 0 : h_theta : (90 - h_theta)
theta = theta_deg * pi / 180;
% 坐标旋转变换
u = a * cos(theta) + b * sin(theta);
v = -a * sin(theta) + b * cos(theta);
% 取小数部分
fu = mod(u, 1); % 横坐标小数部分
fv = mod(v, 1); % 纵坐标小数部分
% 检查横向:是否存在长度2ε的弧覆盖所有fu
[ok_x, tx_val] = check_arc_cover(fu, epsilon);
if ~ok_x
continue; % 横向不满足,跳过
end
% 检查纵向:是否存在长度2ε的弧覆盖所有fv
[ok_y, ty_val] = check_arc_cover(fv, epsilon);
if ~ok_y
continue; % 纵向不满足,跳过
end
% 两个方向均满足
feasible = true;
best_theta = theta_deg;
best_tx = tx_val;
best_ty = ty_val;
fprintf('找到可行解!\n');
fprintf('旋转角度 θ = %.2f°\n', best_theta);
fprintf('平移量 t_x = %.4f,t_y = %.4f\n', best_tx, best_ty);
break;
end
if ~feasible
fprintf('不存在网格使所有 %d 口井均可利用。\n', n);
end
fprintf('\n');
end
% ----------------------------------------------------------------
function [ok, t_val] = check_arc_cover(f_vals, epsilon)
% 功能:检查在环形[0,1)上,是否存在长度2ε的弧覆盖所有点f_vals
% 使用旋转扫描法,时间复杂度O(n log n)
n = length(f_vals);
f_sorted = sort(f_vals); % 升序排序
% 将每个点视为弧的"起点",检查以f_sorted(i)为起点的弧能否覆盖所有点
% 等价于:所有点在环形上的"最大间距" <= 1 - 2ε 不成立
% (即不存在长度 > 1-2ε 的"空隙")
% 计算相邻点之间的环形间距
gaps = diff([f_sorted; f_sorted(1) + 1]); % 包括"环绕"的间距
max_gap = max(gaps);
if max_gap >= 1 - 2 * epsilon
% 存在一个间距 >= 1-2ε,说明"空隙"足够大,
% 可以找到一个弧段的起点在这个空隙的"右端",使弧覆盖所有点
ok = true;
% 找到最大间距对应的位置,弧的起点设在空隙右端
[~, idx] = max(gaps);
if idx < n
t_val = f_sorted(idx + 1) - epsilon;
else
t_val = f_sorted(1) - epsilon + 1; % 环绕情况
end
t_val = mod(t_val, 1); % 保证在[0,1)内
else
% 所有间距都 < 1-2ε,说明点太分散,无法用长度2ε的弧全部覆盖
ok = false;
t_val = NaN;
end
end
代码解析:
-
旋转扫描法的核心思想:如果在环形 [ 0 , 1 ) [0,1) [0,1) 上有 n n n 个点,要用一段长度为 2 ε 2\varepsilon 2ε 的弧覆盖所有点,等价于:所有点按顺序排列后,相邻点之间不存在长度超过 1 − 2 ε 1-2\varepsilon 1−2ε 的空隙。这是因为:如果存在长度为 g ≥ 1 − 2 ε g \geq 1-2\varepsilon g≥1−2ε 的空隙,那么把弧段放在这个空隙的"右侧"(从空隙右端到右端+ 2 ε 2\varepsilon 2ε),恰好可以覆盖所有点。
-
函数分离的好处:
check_arc_cover作为独立函数,可以分别对横纵坐标调用,也可以在不同旋转角度下重复使用,体现了模块化编程的优势。 -
边界情况处理:
[f_sorted; f_sorted(1)+1]这个操作是为了处理"环绕"的情况——最后一个点和第一个点之间的间距需要加1才能在线性数组中表示。
十二、算法流程设计
整体算法流程
具体相关示意图绘制如下,仅供参考:
数据预处理流程
具体相关示意图绘制如下,仅供参考:

十三、MATLAB 完整代码
13.1 主程序 main.m
% main.m
% 钻井布局优化问题主程序
% 对应数学建模竞赛B题"钻井布局"
% 依赖函数:data_preprocess.m, solve_model1.m, solve_model2.m,
% solve_model3.m, plot_results.m, sensitivity_analysis.m
clc; clear; close all;
fprintf('========================================\n');
fprintf(' 钻井布局优化问题 - 主程序\n');
fprintf('========================================\n\n');
%% 第一步:数据预处理
[a, b, n, epsilon] = data_preprocess();
%% 第二步:数据可视化
plot_raw_data(a, b, epsilon);
%% 第三步:求解问题一(切比雪夫距离,仅平移)
[tx1, ty1, N1, flags1] = solve_model1(a, b, epsilon);
%% 第四步:求解问题二(欧氏距离,平移+旋转)
[theta2, tx2, ty2, N2, flags2] = solve_model2(a, b, epsilon);
%% 第五步:求解问题三(全部利用条件判断)
[feasible, theta3, tx3, ty3] = solve_model3(a, b, epsilon);
%% 第六步:结果可视化
plot_results(a, b, epsilon, tx1, ty1, flags1, theta2, tx2, ty2, flags2);
%% 第七步:灵敏度分析
sensitivity_analysis(a, b);
fprintf('========================================\n');
fprintf(' 所有计算完成!\n');
fprintf('========================================\n');
13.2 结果可视化函数
% plot_results.m
function plot_results(a, b, epsilon, tx1, ty1, flags1, theta2, tx2, ty2, flags2)
% 功能:可视化模型一和模型二的最优网格布局
n = length(a);
x_range = [floor(min(a))-1, ceil(max(a))+1];
y_range = [floor(min(b))-1, ceil(max(b))+1];
figure('Name', 'Optimal Grid Layout', 'Position', [50, 50, 1400, 600]);
% ---- 左图:模型一结果 ----
subplot(1, 2, 1);
hold on;
% 绘制网格节点
for gx = (x_range(1)-1) : (x_range(2)+1)
for gy = (y_range(1)-1) : (y_range(2)+1)
node_x = gx + tx1;
node_y = gy + ty1;
if node_x >= x_range(1) && node_x <= x_range(2) && ...
node_y >= y_range(1) && node_y <= y_range(2)
plot(node_x, node_y, 'b+', 'MarkerSize', 8, 'LineWidth', 1.5, ...
'HandleVisibility', 'off');
end
end
end
% 绘制可利用旧井(绿色)和不可利用旧井(红色)
colors_used = zeros(n, 3);
for i = 1:n
if flags1(i)
scatter(a(i), b(i), 100, [0, 0.7, 0], 'filled', 'HandleVisibility', 'off');
% 画误差正方形(切比雪夫距离)
rect_x = [a(i)-epsilon, a(i)+epsilon, a(i)+epsilon, a(i)-epsilon, a(i)-epsilon];
rect_y = [b(i)-epsilon, b(i)-epsilon, b(i)+epsilon, b(i)+epsilon, b(i)-epsilon];
plot(rect_x, rect_y, 'g-', 'LineWidth', 1, 'HandleVisibility', 'off');
else
scatter(a(i), b(i), 100, [0.8, 0, 0], 'filled', 'HandleVisibility', 'off');
end
text(a(i)+0.15, b(i)+0.15, sprintf('P_{%d}', i), 'FontSize', 7);
end
% 添加图例元素
scatter(NaN, NaN, 100, [0, 0.7, 0], 'filled', 'DisplayName', 'Usable Wells');
scatter(NaN, NaN, 100, [0.8, 0, 0], 'filled', 'DisplayName', 'Unusable Wells');
plot(NaN, NaN, 'b+', 'MarkerSize', 8, 'DisplayName', 'Grid Nodes');
xlabel('X Coordinate (units)', 'FontSize', 11);
ylabel('Y Coordinate (units)', 'FontSize', 11);
title(sprintf('Model 1: Chebyshev Distance, Translation Only\nt_x=%.4f, t_y=%.4f, Usable=%d/%d', ...
tx1, ty1, sum(flags1), n), 'FontSize', 11);
legend('Location', 'best');
grid on; axis equal;
xlim(x_range); ylim(y_range);
hold off;
% ---- 右图:模型二结果 ----
subplot(1, 2, 2);
hold on;
theta_rad = theta2 * pi / 180;
R = [cos(theta_rad), -sin(theta_rad); sin(theta_rad), cos(theta_rad)];
% 绘制旋转后的网格节点
for gx = -5 : 15
for gy = -5 : 15
node_local = [gx + tx2; gy + ty2];
node_world = R * node_local;
if node_world(1) >= x_range(1) && node_world(1) <= x_range(2) && ...
node_world(2) >= y_range(1) && node_world(2) <= y_range(2)
plot(node_world(1), node_world(2), 'b+', 'MarkerSize', 8, ...
'LineWidth', 1.5, 'HandleVisibility', 'off');
end
end
end
% 绘制旧井
theta_c = linspace(0, 2*pi, 60);
for i = 1:n
if flags2(i)
scatter(a(i), b(i), 100, [0, 0.7, 0], 'filled', 'HandleVisibility', 'off');
% 画误差圆(欧氏距离)
plot(a(i) + epsilon*cos(theta_c), b(i) + epsilon*sin(theta_c), ...
'g-', 'LineWidth', 1, 'HandleVisibility', 'off');
else
scatter(a(i), b(i), 100, [0.8, 0, 0], 'filled', 'HandleVisibility', 'off');
end
text(a(i)+0.15, b(i)+0.15, sprintf('P_{%d}', i), 'FontSize', 7);
end
scatter(NaN, NaN, 100, [0, 0.7, 0], 'filled', 'DisplayName', 'Usable Wells');
scatter(NaN, NaN, 100, [0.8, 0, 0], 'filled', 'DisplayName', 'Unusable Wells');
plot(NaN, NaN, 'b+', 'MarkerSize', 8, 'DisplayName', 'Grid Nodes');
xlabel('X Coordinate (units)', 'FontSize', 11);
ylabel('Y Coordinate (units)', 'FontSize', 11);
title(sprintf('Model 2: Euclidean Distance, Rotation+Translation\n\\theta=%.2f°, t_x=%.4f, t_y=%.4f, Usable=%d/%d', ...
theta2, tx2, ty2, sum(flags2), n), 'FontSize', 11);
legend('Location', 'best');
grid on; axis equal;
xlim(x_range); ylim(y_range);
hold off;
saveas(gcf, 'optimal_grid_layout.png');
fprintf('结果图已保存为 optimal_grid_layout.png\n');
end
代码解析:
- 旋转网格的绘制:通过旋转矩阵 R R R 将局部坐标系中的整数格点变换回世界坐标系,即
node_world = R * node_local,这与模型中的坐标变换完全对应; - 切比雪夫距离用正方形表示覆盖区域,欧氏距离用圆形,形状不同直接体现了两种距离度量的本质差异;
saveas保存图片:竞赛中图片质量很重要,建议保存为PNG(300dpi以上)。
13.3 灵敏度分析函数
% sensitivity_analysis.m
function sensitivity_analysis(a, b)
% 功能:分析误差阈值ε变化对可利用旧井数的影响
fprintf('===== 灵敏度分析:ε对可利用井数的影响 =====\n');
epsilon_range = 0.01 : 0.005 : 0.15; % ε从0.01到0.15
N1_results = zeros(size(epsilon_range)); % 模型一结果
N2_results = zeros(size(epsilon_range)); % 模型二结果
for k = 1:length(epsilon_range)
eps = epsilon_range(k);
[~, ~, N1_results(k), ~] = solve_model1(a, b, eps);
[~, ~, ~, N2_results(k), ~] = solve_model2(a, b, eps);
fprintf('ε = %.3f: 模型一 N1=%d, 模型二 N2=%d\n', eps, N1_results(k), N2_results(k));
end
% 绘制灵敏度分析图
figure('Name', 'Sensitivity Analysis', 'Position', [100, 100, 800, 500]);
plot(epsilon_range, N1_results, 'b-o', 'LineWidth', 2, 'MarkerSize', 6, ...
'DisplayName', 'Model 1 (Chebyshev, Translation)');
hold on;
plot(epsilon_range, N2_results, 'r-s', 'LineWidth', 2, 'MarkerSize', 6, ...
'DisplayName', 'Model 2 (Euclidean, Rotation+Trans)');
xline(0.05, 'k--', 'LineWidth', 1.5, 'Label', '\epsilon = 0.05 (given)', ...
'LabelVerticalAlignment', 'bottom');
xlabel('\epsilon (Error Threshold, units)', 'FontSize', 12);
ylabel('Number of Usable Wells', 'FontSize', 12);
title('Sensitivity Analysis: Effect of \epsilon on Usable Well Count', 'FontSize', 13);
legend('Location', 'best');
grid on;
ylim([0, length(a)+1]);
yticks(0 : length(a));
hold off;
saveas(gcf, 'sensitivity_analysis.png');
fprintf('灵敏度分析图已保存为 sensitivity_analysis.png\n\n');
end
代码解析:
- 灵敏度分析的意义: ε = 0.05 \varepsilon = 0.05 ε=0.05 是题目给定的,但在实际工程中这个值可能有不确定性。分析 ε \varepsilon ε变化时结果的稳定性,能说明模型的鲁棒性;
- 图表设计:用
xline标出题目给定的 ε = 0.05 \varepsilon = 0.05 ε=0.05 处的垂直参考线,让读者一眼看到"当前参数在整个灵敏度曲线上的位置"; - 竞赛提示:若模型结果在 ε \varepsilon ε 小幅变化时急剧变化,说明结论对参数敏感,论文中需要说明;若变化平缓,则结论更具可靠性。
十四、结果展示与分析
14.1 主要结果
以下给出基于本题算法的预期结果分析(由于未实际运行代码,以下为定性分析,实际数值以运行结果为准):
问题一(切比雪夫距离,仅平移):
观察12口旧井的坐标小数部分:
| 井 | a i a_i ai | b i b_i bi | a i 1 {a_i}_1 ai1 | b i 1 {b_i}_1 bi1 | 备注 |
|---|---|---|---|---|---|
| P3 | 3.00 | 1.50 | 0.00 | 0.50 | 接近整数横坐标 |
| P6 | 4.72 | 2.00 | 0.28 | 0.00 | 接近整数纵坐标 |
| P7 | 4.72 | 6.24 | 0.28 | 0.24 | 横坐标与P6相同 |
| P9 | 7.57 | 2.01 | 0.43 | 0.01 | 纵坐标接近整数 |
若选取 t x ≈ 0.28 t_x \approx 0.28 tx≈0.28,则 P6 和 P7 的横坐标小数部分 0.72 − 0.28 1 = 0.44 1 = 0.44 > 0.05 {0.72 - 0.28}_1 = {0.44}_1 = 0.44 > 0.05 0.72−0.281=0.441=0.44>0.05,这说明需要更仔细的搜索。
实际上,最优平移量的确定需要完整运行代码。从结构上分析,预期可利用井数约为 4-7口(取决于精确搜索结果)。
问题二(欧氏距离,平移+旋转):
引入旋转自由度后,理论上可以利用更多旧井。考虑到旧井的实际分布,若某几口井近似排列在与坐标轴成某角度的直线上,旋转网格可以同时覆盖它们。预期比模型一多覆盖 1-3 口井。
14.2 结果对应题目要求
| 题目要求 | 模型输出 | 对应关系 |
|---|---|---|
| “使可利用旧井数尽可能多” | 最大化 f ( t x , t y ) f(t_x,t_y) f(tx,ty) 的值 N ∗ N^* N∗ | 直接对应目标函数最大化 |
| “给出数值计算方法” | 网格搜索算法,步长 h = 0.001 h=0.001 h=0.001 | 精度 10 − 3 10^{-3} 10−3,满足题目精度要求 |
| “对数值算例计算” | 对12口井数据运行算法 | 直接计算 |
| “考虑网格可旋转” | 引入参数 θ \theta θ,三维搜索 | 模型二扩展 |
| “给出判定条件” | 旋转扫描法, O ( n log n ) O(n\log n) O(nlogn) 算法 | 模型三 |
14.3 结果的现实意义
- 节省成本量化:若最优结果使 k k k 口旧井可被利用,则节省费用为 490 k 490k 490k 万元。对于12口旧井,最多节省 490 × 12 = 5880 490 \times 12 = 5880 490×12=5880 万元;
- 网格方向的选择:问题二表明,适当旋转网格(哪怕只有几度)可能额外利用1-2口旧井,每口节省490万元,因此旋转优化的实际经济价值非常显著;
- 误差阈值的工程含义: ε = 0.05 \varepsilon = 0.05 ε=0.05 对应实际距离约5米(若1单位=100米),意味着当旧井距规划井位5米以内时,认为旧井资料有效——这在实际地质勘探中是合理的。
十五、模型检验
15.1 误差分析
本模型为精确搜索,不存在"预测误差"。主要误差来源是离散化误差——网格搜索的步长 h = 0.001 h=0.001 h=0.001 意味着最优平移量的精度为 ± 0.0005 \pm 0.0005 ±0.0005。
离散化误差的影响分析:
若真实最优 t x ∗ = 0.4725 t_x^* = 0.4725 tx∗=0.4725,而搜索找到 t ^ x = 0.472 \hat{t}_x = 0.472 t^x=0.472(误差 0.0005 0.0005 0.0005),对旧井 P i P_i Pi 的覆盖判断误差为:
∣ a i − t ^ x 1 − a i − t x ∗ 1 ∣ ≤ 0.0005 ≪ ε = 0.05 |{a_i - \hat{t}_x}_1 - {a_i - t_x^*}_1| \leq 0.0005 \ll \varepsilon = 0.05 ∣ai−t^x1−ai−tx∗1∣≤0.0005≪ε=0.05
因此离散化误差对覆盖判断的影响可忽略不计(误差约为 ε \varepsilon ε 的1%)。
15.2 灵敏度分析
对误差阈值 ε \varepsilon ε 进行变化,关注两个指标:
- 可利用井数随 ε \varepsilon ε 的变化曲线:应该是单调不减的阶梯函数( ε \varepsilon ε 增大,覆盖能力增强);
- 结论的稳定区间:若在 ε ∈ [ 0.04 , 0.06 ] \varepsilon \in [0.04, 0.06] ε∈[0.04,0.06] 内可利用井数不变,说明结论对 ε \varepsilon ε 的小幅误差具有鲁棒性。
% 灵敏度分析关键检查代码片段
% 检查在ε=0.05附近,结论是否稳定
for eps = [0.03, 0.04, 0.045, 0.05, 0.055, 0.06, 0.07]
[~, ~, N, ~] = solve_model1(a, b, eps);
fprintf('ε = %.3f → 模型一可利用井数 = %d\n', eps, N);
end
15.3 稳定性分析
搜索步长稳定性:分别用步长 h = 0.005 , 0.002 , 0.001 , 0.0005 h = 0.005, 0.002, 0.001, 0.0005 h=0.005,0.002,0.001,0.0005 搜索,若最优解不变,则说明 h = 0.001 h=0.001 h=0.001 已足够精细。
角度步长稳定性(模型二):分别用 Δ θ = 1 ° , 0.5 ° , 0.1 ° \Delta\theta = 1°, 0.5°, 0.1° Δθ=1°,0.5°,0.1° 搜索,比较最优角度和可利用井数是否收敛。
15.4 鲁棒性分析
坐标扰动测试:对旧井坐标加入小随机扰动( ± 0.01 \pm 0.01 ±0.01 单位),重新求解,观察最优参数和可利用井数的变化幅度,评估结论对输入数据的敏感性。
十六、模型优缺点
模型一(切比雪夫距离,平移优化)
优点:
- 利用切比雪夫距离的可分离性,将二维问题分解为两个独立的一维问题,大幅降低计算复杂度;
- 网格搜索算法简单可靠,不存在局部最优问题(穷举全局);
- 代码实现简洁,易于验证和调试;
- 计算速度快( 10 6 10^6 106 次运算约0.5秒)。
缺点:
- 切比雪夫距离在实际勘探中不如欧氏距离直观(实地距离应为直线距离);
- 网格步长 h = 0.001 h=0.001 h=0.001 固定,若需要更高精度需重新设置(计算量按 h − 2 h^{-2} h−2 增长);
- 不考虑旋转,自由度受限,可能错过更优解;
- 当 n n n 很大时,暴力搜索计算量大,需要改用智能优化算法。
可改进方向:
- 用"候选平移量"方法替代穷举:分析每口井对 t x t_x tx 的约束,只搜索"临界"的 t x t_x tx 值(即 t x = a i 1 ± ε t_x = {a_i}_1 \pm \varepsilon tx=ai1±ε),将搜索点从 10 6 10^6 106 降至 O ( n 2 ) O(n^2) O(n2);
- 利用区间交集算法,将问题转化为区间覆盖问题, O ( n log n ) O(n\log n) O(nlogn) 求解。
模型二(欧氏距离,旋转+平移)
优点:
- 欧氏距离是实地距离的真实反映,更符合实际问题的物理含义;
- 引入旋转自由度,搜索空间更大,理论上能找到更优解;
- 利用正方形网格90°对称性,将旋转搜索范围压缩至 [ 0 ° , 90 ° ) [0°, 90°) [0°,90°),节省计算量。
缺点:
- 计算量显著增加(新增角度维度);
- 欧氏距离下横纵方向不可分离,无法利用模型一的加速技巧;
- 粗搜索角度步长 0.1 ° 0.1° 0.1° 可能在某些情况下错过精确最优角度;
- 在旋转接近 0 ° 0° 0° 或 45 ° 45° 45° 时可能出现数值不稳定(对称性导致多个等价最优解)。
可改进方向:
- 两阶段搜索:先用 Δ θ = 1 ° \Delta\theta=1° Δθ=1° 粗搜索,找到最优角度附近后用 Δ θ = 0.01 ° \Delta\theta=0.01° Δθ=0.01° 精搜索;
- 使用粒子群优化(PSO)或模拟退火(SA)替代穷举,处理更大规模数据;
- 利用傅里叶分析挖掘旧井分布的周期性特征,预先估计最优旋转角度。
模型三(全部利用条件)
优点:
- 给出了精确的充要条件,算法时间复杂度 O ( n log n ) O(n\log n) O(nlogn),可扩展到大规模数据;
- 旋转扫描法是组合几何中的经典算法,理论严密;
- 结论具有决策意义:若判断为"不可行",可以估计需要调整多少井的位置。
缺点:
- 基于"横纵坐标可分离"假设,仅在切比雪夫距离下严格成立;
- 欧氏距离下的全部利用条件分析更复杂(二维环面上的覆盖问题),本模型给出的是近似算法;
- 当 n n n 很大时,即使算法有效,全部利用的可能性极低,该模型的实用意义下降。
十七、论文写作建议
17.1 摘要写法
数学建模摘要的核心逻辑是:做了什么→用了什么方法→得到什么结果→有什么意义。
典型结构(4-6段,400-600字):
- 第一段(背景+问题):简述题目背景,提炼核心问题;
- 第二段(问题一的方法+结果):说明建立了什么模型,用什么算法,得到什么数值结果;
- 第三段(问题二的方法+结果):同上,强调相比问题一的改进之处;
- 第四段(问题三的方法+结论):给出判定条件,说明算法;
- 第五段(检验+评价):简述模型检验方法,说明优缺点。
关键词选择:正方形网格、切比雪夫距离、欧氏距离、网格平移、网格旋转、最优覆盖、旋转扫描法、组合优化。
17.2 模型建立写法
论文中的"模型建立"章节应避免写成"我们首先……然后……最后……"的流水账。建议:
- 先给出核心数学变换(如周期性简化),解释为什么这样做;
- 再写目标函数和约束;
- 最后说明求解算法。
错误示例:“我们对每口旧井计算其与每个网格节点的距离,找最小值,判断是否小于ε……”(这是在描述算法步骤,不是建模)
正确示例:“注意到网格节点坐标具有周期性,故旧井 P i P_i Pi到最近节点的距离仅取决于其坐标相对于整数格点的余量,即……”(先揭示关键性质,再推导模型)
17.3 结果分析写法
不要只写"由表可知,最优平移量为……可利用旧井数为……"。应该:
- 解释结果的现实含义(节省多少钱,井位如何分布);
- 解释为什么这个平移/旋转是最优的(有什么几何直觉?);
- 指出异常情况(某口井为什么很难被覆盖?);
- 与初始猜测或直觉对比(旋转真的比不旋转好多少?)。
17.4 模型评价写法
不要只写"模型优点是精度高、计算快,缺点是……"这种套话。要结合本题的具体情况:
- 对本题:网格搜索的步长 h = 0.001 h=0.001 h=0.001 对应多大的精度误差?这对覆盖判断有无实质影响?
- 若 n n n 从12增大到1000,当前算法还适用吗?如何改进?
17.5 参考文献写法
建模论文的参考文献应该包括:
- 算法来源(如最优化教材、具体算法论文);
- 距离度量的理论依据;
- 类似问题的已有研究(如设施选址、覆盖问题)。
建议格式(国标GB/T 7714-2015):
[1] 运筹学教材编写组. 运筹学(第四版)[M]. 北京: 清华大学出版社, 2012.
[2] Preparata F P, Shamos M I. Computational Geometry: An Introduction[M]. New York: Springer, 1985.
17.6 附录整理
附录代码应按以下格式整理:
- 先列出函数调用关系图;
- 每个函数文件单独作为一个附录小节;
- 代码中的中文注释可以保留(说明给评委看的);
- 不需要贴出所有运行输出,选取关键输出截图即可。
十八、数学建模论文摘要示例
摘要
本文针对钻井布局优化问题,研究了如何通过合理布置正方形勘探网格,最大化利用已有旧井资料,以节约钻探成本。
对于问题一,在切比雪夫距离度量下,利用正方形网格节点坐标的周期性,将无限搜索空间压缩为有限的二维平移参数空间 ( t x , t y ) ∈ [ 0 , 1 ) 2 (t_x, t_y) \in [0,1)^2 (tx,ty)∈[0,1)2。建立了以可利用旧井数量为目标函数的组合优化模型,并采用步长 h = 0.001 h=0.001 h=0.001 的均匀网格搜索法求解。对题目给出的12口旧井数值算例,计算得最优平移量为 ( t x ∗ , t y ∗ ) = ( ⋯ , ⋯ ) (t_x^*, t_y^*) = (\cdots, \cdots) (tx∗,ty∗)=(⋯,⋯),最多可利用 N 1 ∗ N_1^* N1∗ 口旧井(占总数的 N 1 ∗ / 12 × 100 N_1^*/12 \times 100% N1∗/12×100)。
对于问题二,在欧氏距离度量下,进一步引入网格旋转角度 θ \theta θ 作为决策变量,将问题扩展为三维搜索问题。通过坐标系旋转变换,将旧井坐标投影至网格局部坐标系,使得每一固定角度 θ \theta θ 下的子问题退化为平移优化。利用正方形网格的90°旋转对称性,将角度搜索范围压缩至 [ 0 ° , 90 ° ) [0°, 90°) [0°,90°)。计算结果表明,最优旋转角 θ ∗ = ⋯ ° \theta^* = \cdots° θ∗=⋯°,可利用旧井数提升至 N 2 ∗ N_2^* N2∗ 口。
对于问题三,在切比雪夫距离下,推导出 n n n 口旧井均可被利用的充要条件:所有旧井横坐标小数部分在环形区间 [ 0 , 1 ) [0,1) [0,1) 上存在一段长度为 2 ε 2\varepsilon 2ε 的弧将其全部覆盖,且纵坐标同样满足此条件。基于此条件,设计了时间复杂度为 O ( n log n ) O(n\log n) O(nlogn) 的旋转扫描判定算法。对本题12口旧井数据,计算验证了可行性并给出了相应结论。
最后,对误差阈值 ε \varepsilon ε 进行灵敏度分析,结果表明在 ε ∈ [ 0.04 , 0.06 ] \varepsilon \in [0.04, 0.06] ε∈[0.04,0.06] 范围内可利用井数稳定,模型结论具有良好的鲁棒性。
关键词:钻井布局;正方形网格;切比雪夫距离;欧氏距离;网格平移优化;网格旋转;旋转扫描算法;覆盖问题
写作提示:上述摘要中 ⋯ \cdots ⋯ 处需填入实际运行代码后的数值结果。摘要中的"计算得……"必须是真实计算结果,不能是估计值。
十九、常见问题与踩坑总结
1. 拿到数学建模题目后为什么不能马上写代码?
这是建模竞赛中最普遍的误区之一。代码是"手段",不是"目的"——你不知道要解什么问题,写出的代码就算能运行,也不知道结果是否正确。建模的第一步应该是把题目转化为数学语言:变量是什么?目标是什么?约束是什么?只有把这三点搞清楚,才能决定用什么算法,才能写出对的代码。很多同学花了3小时写代码,最后发现解的是错误的问题,不如花30分钟把模型想清楚。
2. 问题重述和题目复述有什么区别?
题目复述是把原文照抄一遍,问题重述是用你自己的数学语言重新描述问题。好的问题重述应该包括:引入了哪些变量符号、目标是什么(最大化/最小化什么量)、约束是什么(等式/不等式)。本题的问题重述应明确指出:决策变量是 ( t x , t y , θ ) (t_x, t_y, \theta) (tx,ty,θ),目标函数是可利用井数,约束是 d ( P i , X j ) ≤ ε d(P_i, X_j) \leq \varepsilon d(Pi,Xj)≤ε。
3. 模型假设是不是越多越好?
绝对不是。假设要"精准",不要"多"。每一条假设应该对应一个建模简化步骤——如果这条假设去掉,模型会发生什么变化?如果没有影响,这条假设就是多余的。本题的关键假设是"网格是刚性的"和"周期性假设",这两条直接支撑了降维简化。而"假设数据准确无误"这类废话假设,写了反而显得不专业。
4. 为什么公式很多但论文依然得分不高?
因为公式只是表达形式,评委看的是建模思路是否清晰、公式是否对应实际问题、结果是否正确并得到合理解释。很多论文堆满了从教材照抄的公式,但和题目根本没关系;还有论文公式写了一大堆,却没有说明每个符号代表什么、这个公式解决了什么问题。公式是服务于思想的,思想才是核心。
5. MATLAB代码结果如何对应论文表格?
MATLAB的 fprintf 和 disp 输出的数值,应该原封不动地填入论文表格,不能"四舍五入到看起来漂亮的数字"。论文中每张结果表都应该注明是由哪段代码(哪个函数)计算得到的,方便评委复现。建议在附录中给出代码的关键输出截图,与正文表格一一对应。
6. 没有附件数据时如何构建合理分析框架?
先把模型建好,再用"模拟数据"验证代码的正确性。本题直接给了数值算例,非常好。若没有数据,可以自己生成符合题目描述分布特征的随机数据(比如:随机生成20口井,坐标在10×10区域内均匀分布),验证算法的逻辑是否正确,最后说明"由于无真实数据,以下结果为算法验证性结果,实际应用时需替换为真实数据"。
7. 预测模型如何选择误差指标?
本题不是预测问题,但这是通用问题。选择误差指标的原则:
- MAE(平均绝对误差):对异常值不敏感,适合误差分布不均匀时;
- RMSE(均方根误差):对大误差更敏感,适合工程中对大偏差容忍度低的情形;
- MAPE(平均绝对百分比误差):适合不同量级数据的比较;
- R 2 R^2 R2(决定系数):适合评价模型拟合优度,但对线性假设敏感。
不要所有指标都写,要根据题目的具体要求选1-2个最相关的。
8. 评价模型中权重如何确定?
评价模型的权重确定是竞赛中的难点。常用方法:
- 层次分析法(AHP):通过两两比较判断矩阵确定权重,需要说明一致性检验;
- 熵权法:基于数据的信息熵确定权重,客观但依赖数据分布;
- 专家打分法:主观但有实际依据;
- 组合权重:将主观方法(AHP)和客观方法(熵权法)结合。
无论用哪种方法,都要明确说明权重确定的依据和理由,不能无端给出一组权重。
9. 优化模型如何确定目标函数和约束条件?
先回答三个问题:(1)"希望让什么量变得最好"→目标函数;(2)"有哪些客观限制不能违反"→约束条件;(3)"有哪些量是可以调控的"→决策变量。本题:目标是最多利用旧井(最大化可利用数量),决策变量是网格平移量和旋转角,约束是误差不超过阈值。三个要素都清晰,模型就能建立。
10. 国赛论文和美赛论文写法有什么区别?
- 国赛:中文,约20-30页,有固定的摘要格式(要求在一张A4纸内写完整摘要),问题重述和建模部分要详细;
- 美赛:英文,约20-25页,摘要是独立文件(1页),正文更强调建模的创新性和实际应用价值,文字比公式更重要;
- 共同点:都强调结果的解释,都需要灵敏度分析,都要有模型评价。
11. 如何避免论文像代码说明书?
论文是给人看的,不是给计算机看的。检验标准:把代码部分遮住,论文还能不能读通?若不行,说明论文过于依赖代码解释。论文应该讲的是:为什么这样建模、这个模型有什么数学性质、结果说明了什么现实问题——而不是"第3行我们初始化了变量"。
12. 如何写出高质量摘要?
高质量摘要的特征:读完能知道"做了什么、怎么做的、结果是什么、有什么意义"。写摘要时先写一个草稿,然后问自己:如果评委只看摘要,他能给这篇论文打多少分?好的摘要每句话都有信息量,没有废话。
13. 如何自然地提出模型改进?
不要在"模型优缺点"章节最后突然加一句"未来可以用深度学习改进"。改进应该是针对你已经发现的具体不足,比如:“当前穷举搜索在 n > 100 n>100 n>100时计算量达到 10 9 10^9 109级,可以改用区间交集算法将复杂度降至 O ( n log n ) O(n\log n) O(nlogn)”——这种改进是具体的、有依据的。
14. 模型优缺点如何写得具体?
优缺点不能只写"计算量小、精度高"这样的笼统表述。要具体到:这个模型的计算量是多少( O ( n 2 ) O(n^2) O(n2)还是 O ( n log n ) O(n\log n) O(nlogn))?在什么规模的数据下会出现瓶颈?哪些假设在现实中可能不成立?不成立时结果会怎么偏?每条优缺点最好能对应到一个具体的建模步骤。
15. 附录代码应该如何整理?
附录代码不是把所有代码复制粘贴进去。应该:(1)只保留核心算法代码,辅助代码(如绘图)可以省略;(2)代码有注释,关键步骤有说明;(3)给出代码的函数结构(调用关系图);(4)附上关键运行结果的截图;(5)如果代码超过10页,考虑只贴最核心的1-2个函数,其余说明"完整代码见电子附件"。
二十、总结
本题核心建模思想回顾
这道"钻井布局"题的核心建模思想可以用一句话概括:
利用正方形网格的周期性,将无穷大的节点搜索问题,压缩为有限的平移参数空间搜索问题。
这个思想的发现过程值得反复体会——它不是靠套公式得来的,而是靠对网格几何结构的深入观察。这正是数学建模区别于普通编程的地方:数学洞察力,比写代码速度更重要。
学习收获总结
读完本文,你应该能够:
- 理解核心建模思想:周期性压缩、切比雪夫距离的可分离性、坐标旋转变换;
- 掌握两种基础模型:切比雪夫距离+仅平移(模型一)、欧氏距离+平移旋转(模型二);
- 理解可行性判断的思路:从优化问题到判断问题的转化(模型三);
- 能运行MATLAB代码:所有代码均有注释和解析,可直接运行(需填入实际坐标数据);
- 理解结果分析方法:灵敏度分析、稳定性验证、现实意义解释;
- 学会论文写作思路:摘要、模型建立、结果分析的写法;
- 避免常见误区:不过早写代码、不堆砌公式、不写空泛套话。
最后的话
数学建模最难的不是数学,而是如何把一个模糊的现实问题,变成一个清晰的数学问题。这道"钻井布局"题给了我们一个很好的练习:从"省钱"到"覆盖最多旧井",从"无穷多节点"到" [ 0 , 1 ) 2 [0,1)^2 [0,1)2的平移参数",每一步简化都需要数学直觉和几何理解。
建模能力的提升没有捷径,但有方法:多做题、多思考"为什么"、多问自己"这个假设合不合理"。希望这篇文章能帮你建立信心——每个看起来复杂的建模题,都有它的"核心突破口",找到它,后面的路就顺了。
加油!数学建模不只是竞赛,更是一种思维方式。
声明:以上内容部分基于人工智能辅助生成,仅供参考交流,不构成任何专业建议。模型输出可能存在偏差,使用前请自行核实,后果自负。欢迎理性讨论。
若需原题 PDF、附件或历年高教社杯真题,关注技术号 「猿圈奇妙屋」,回复【高教社杯】即可获取。
🎁 文末福利
本专栏内容源自实际建模经验、竞赛题目及读者需求。如涉及版权问题,请告知,将立即处理。部分解法思路参考了网络优秀文章,若未能完全契合你的场景,欢迎在评论区分享更优解法,共同探讨、共同进步!
更多建模方法、工具与竞赛题解,欢迎访问专栏 👉 《《滚雪球学数学建模(含历年真题)》
如果本文对你有帮助,欢迎点赞、收藏、关注,你的支持是我持续创作的动力!
同时推荐关注技术号 「猿圈奇妙屋」,获取建模干货、竞赛真题解析、4000G 技术资料、简历模板等海量内容,助你快速突破瓶颈。
🫵 关于作者
我是 bug菌,数学建模竞赛指导教师,曾指导学生斩获国赛一等奖、美赛 M 奖等,擅长运动学建模、优化模型、评价模型等方向。
活跃于 CSDN · 掘金 · InfoQ · 51CTO · 华为云 · 阿里云 · 腾讯云 · 开源中国 · 博客园 · 墨天轮 等平台
🏅 CSDN 博客之星 Top30 · 华为云十佳博主 · 掘金人气作者 Top40 · 多平台签约优质作者 · 全网粉丝 30w+
更多优质内容与成长资料 👉 点击查看 👈
欢迎加入硬核技术号 「猿圈奇妙屋」,一起进阶打怪!

- End -

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 1
1 0
0- 0



 已为社区贡献142条内容
已为社区贡献142条内容

所有评论(0)