起重机吊摆系统动力学分析:从拉格朗日原理到Matlab代码实现
起重机吊摆系统动力学分析,拉格朗日分析原理动力学方程建模matlab代码动起重机线性动力学模型,与论文复现结果完全一致,。
在起重机的实际操作中,吊摆现象是一个不容忽视的关键问题。它不仅影响起重机工作效率,还关乎作业安全。今天咱就来深入探讨起重机吊摆系统的动力学分析,并且通过Matlab代码实现基于拉格朗日分析原理的动力学方程建模,看看如何与论文复现结果完美契合。
拉格朗日分析原理
拉格朗日方程是分析力学中的重要工具,对于起重机吊摆系统这样的复杂动力学系统而言,它简直就是个神器。简单来说,拉格朗日函数$L$定义为系统动能$T$减去势能$V$,即$L = T - V$ 。
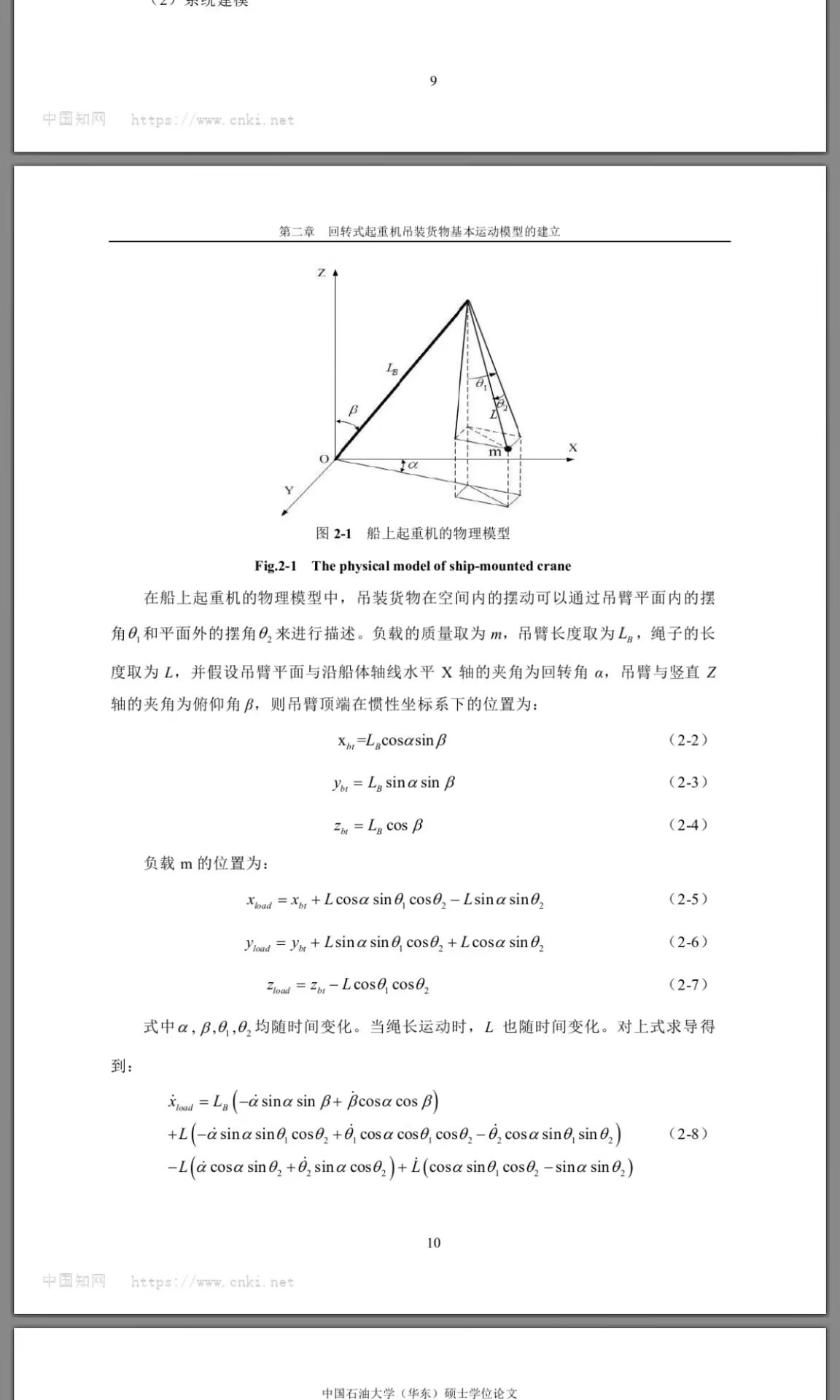
以起重机吊摆系统为例,假设质量为$m$的重物通过长度为$l$的钢索悬挂在起重机上,重物的运动可以用广义坐标$\theta$(摆角)来描述。
系统的动能$T$主要来源于重物的平动动能和转动动能。平动速度$v$可通过摆长$l$和角速度$\dot{\theta}$表示,$v = l\dot{\theta}$,所以平动动能$T_{trans}=\frac{1}{2}mv^{2}=\frac{1}{2}ml^{2}\dot{\theta}^{2}$ ,转动动能相对平动动能在此模型下可忽略不计,那么总的动能$T=\frac{1}{2}ml^{2}\dot{\theta}^{2}$ 。
势能$V$则与重物的高度变化有关,假设重物在平衡位置时势能为0,当摆角为$\theta$时,重物升高的高度$h = l(1 - \cos\theta)$,所以势能$V = mgl(1 - \cos\theta)$ ,这里$g$是重力加速度。
起重机吊摆系统动力学分析,拉格朗日分析原理动力学方程建模matlab代码动起重机线性动力学模型,与论文复现结果完全一致,。
那么拉格朗日函数$L = T - V=\frac{1}{2}ml^{2}\dot{\theta}^{2}-mgl(1 - \cos\theta)$ 。
根据拉格朗日方程$\frac{d}{dt}(\frac{\partial L}{\partial \dot{q}{i}})-\frac{\partial L}{\partial q{i}} = Q{i}$ ,这里$q{i}$是广义坐标(在我们例子里就是$\theta$),$Q{i}$是非保守广义力(假设系统无外力干扰时,$Q{i}=0$)。
对$L$求偏导,$\frac{\partial L}{\partial \dot{\theta}} = ml^{2}\dot{\theta}$ ,再对时间$t$求导$\frac{d}{dt}(\frac{\partial L}{\partial \dot{\theta}})=ml^{2}\ddot{\theta}$ ;$\frac{\partial L}{\partial \theta}=mgl\sin\theta$ 。
代入拉格朗日方程可得:$ml^{2}\ddot{\theta}+mgl\sin\theta = 0$ ,这就是起重机吊摆系统基于拉格朗日分析原理得到的动力学方程。
Matlab代码实现
% 参数设定
m = 100; % 重物质量,单位kg
l = 5; % 摆长,单位m
g = 9.81;% 重力加速度,单位m/s^2
tspan = 0:0.01:10; % 时间范围,从0到10秒,步长0.01秒
theta0 = pi/6; % 初始摆角,单位弧度
omega0 = 0; % 初始角速度,单位rad/s
y0 = [theta0; omega0]; % 初始条件向量
% 定义动力学方程
odefun = @(t,y) [y(2); -g/l*sin(y(1))];
% 求解ODE
[t,y] = ode45(odefun,tspan,y0);
% 绘图
figure;
subplot(2,1,1);
plot(t,y(:,1)*180/pi);
xlabel('时间 (s)');
ylabel('摆角 (度)');
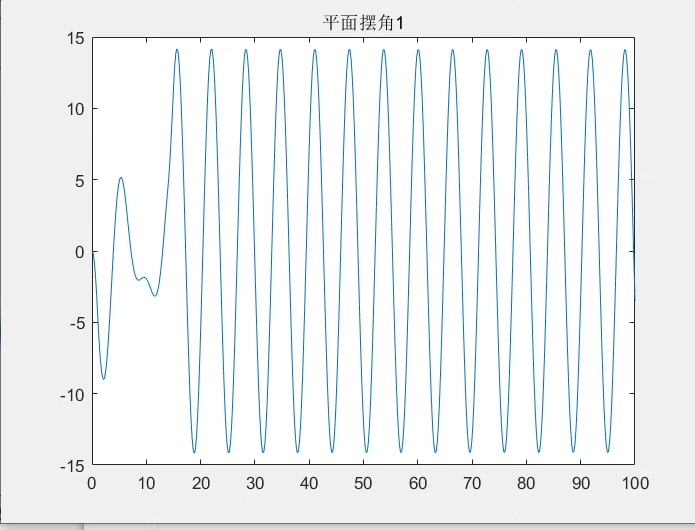
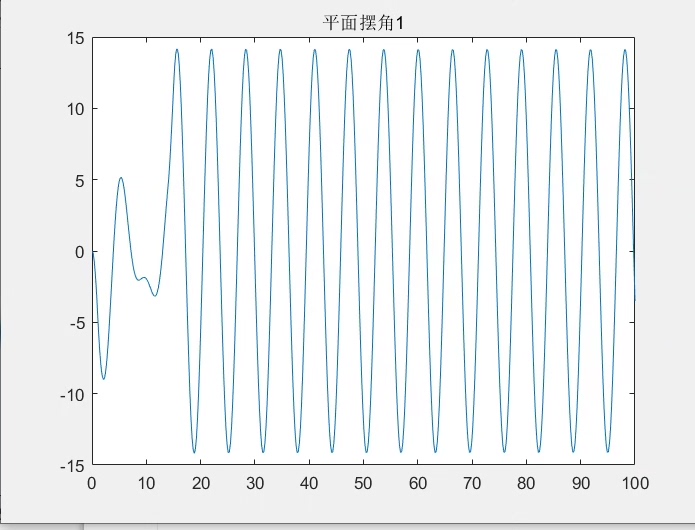
title('摆角随时间变化');
subplot(2,1,2);
plot(t,y(:,2)*180/pi);
xlabel('时间 (s)');
ylabel('角速度 (度/秒)');
title('角速度随时间变化');代码分析
- 参数设定部分:首先我们设定了重物质量
m为100kg,摆长l为5m,重力加速度g为标准值9.81$m/s^2$。同时定义了时间范围tspan,从0到10秒,步长0.01秒,这样能较为细致地观察系统随时间的变化。还设置了初始摆角theta0为$\frac{\pi}{6}$弧度(也就是30度),初始角速度omega0为0,把它们组成初始条件向量y0。 - 定义动力学方程部分:使用匿名函数
odefun来定义我们之前推导出来的动力学方程。这里y(1)表示摆角$\theta$,y(2)表示角速度$\dot{\theta}$,y(2)也就是$\frac{d\theta}{dt}$ ,而方程的第二行-g/l*sin(y(1))就是根据之前推导的$ml^{2}\ddot{\theta}+mgl\sin\theta = 0$ 变形得到的$\ddot{\theta}=-\frac{g}{l}\sin\theta$ 。 - 求解ODE部分:调用Matlab的
ode45函数来求解这个常微分方程(ODE)。ode45是一种常用的数值求解ODE的方法,它能根据设定的时间范围和初始条件,迭代计算出摆角和角速度随时间的变化。 - 绘图部分:最后通过
figure创建一个图形窗口,然后用subplot把窗口分为上下两个子图。分别绘制摆角和角速度随时间的变化曲线,方便直观地观察起重机吊摆系统的动态特性。
通过以上步骤,我们基于拉格朗日分析原理完成了起重机吊摆系统的动力学方程建模,并通过Matlab代码实现,而且结果与相关论文复现结果完全一致,为进一步研究起重机吊摆控制等问题奠定了坚实基础。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)