四旋翼飞行器UAV_MPC模型预测轨迹跟踪控制matlab仿真
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、四旋翼飞行器的特点与控制挑战
-
四旋翼飞行器特点:四旋翼飞行器作为一种典型的欠驱动系统,具有结构简单、机动性强等特点。它通过四个旋翼产生的升力实现飞行,四个旋翼两两对转,以抵消扭矩。这种结构使得四旋翼飞行器能够在狭小空间内灵活起降和悬停,广泛应用于航拍、物流配送、环境监测等领域。
-
控制挑战:然而,四旋翼飞行器的动力学特性高度非线性且各自由度之间强耦合。其六个自由度(三个平移和三个旋转)的运动相互影响,例如改变一个旋翼的转速,不仅会影响飞行器的垂直升力,还会因反扭矩和升力不平衡导致飞行器姿态发生变化。此外,飞行过程中还受到外界环境如气流、阵风等干扰,以及自身模型参数不确定性的影响,这使得精确控制其飞行轨迹极具挑战性。传统的线性控制方法难以应对这些复杂特性,因此需要更先进的控制策略。
二、模型预测控制(MPC)基本原理
-
模型预测控制核心思想:模型预测控制是一种基于模型的先进控制策略,广泛应用于各类复杂系统。其核心在于利用系统的预测模型,在每个采样时刻预测系统未来一段时间(预测时域)内的输出。通过求解一个有限时域的优化问题,得到当前时刻的最优控制输入,使系统输出尽可能接近期望值,同时满足一系列约束条件,如输入输出约束、状态约束等。在每个新的采样时刻,基于最新的系统状态信息,重复上述过程,滚动优化控制输入。
-
MPC 优势:MPC 的优势在于它能够处理多变量、非线性以及具有约束条件的系统。它通过考虑系统未来的动态行为来计算控制输入,而不是仅仅基于当前的误差,这使得它在应对复杂系统和变化的环境时表现出色。对于四旋翼飞行器,MPC 可以在考虑其非线性动力学特性、外界干扰以及执行机构限制(如旋翼转速限制)的情况下,仍能实现精确的轨迹跟踪控制。
三、四旋翼飞行器 UAV_MPC 模型预测轨迹跟踪控制原理
-
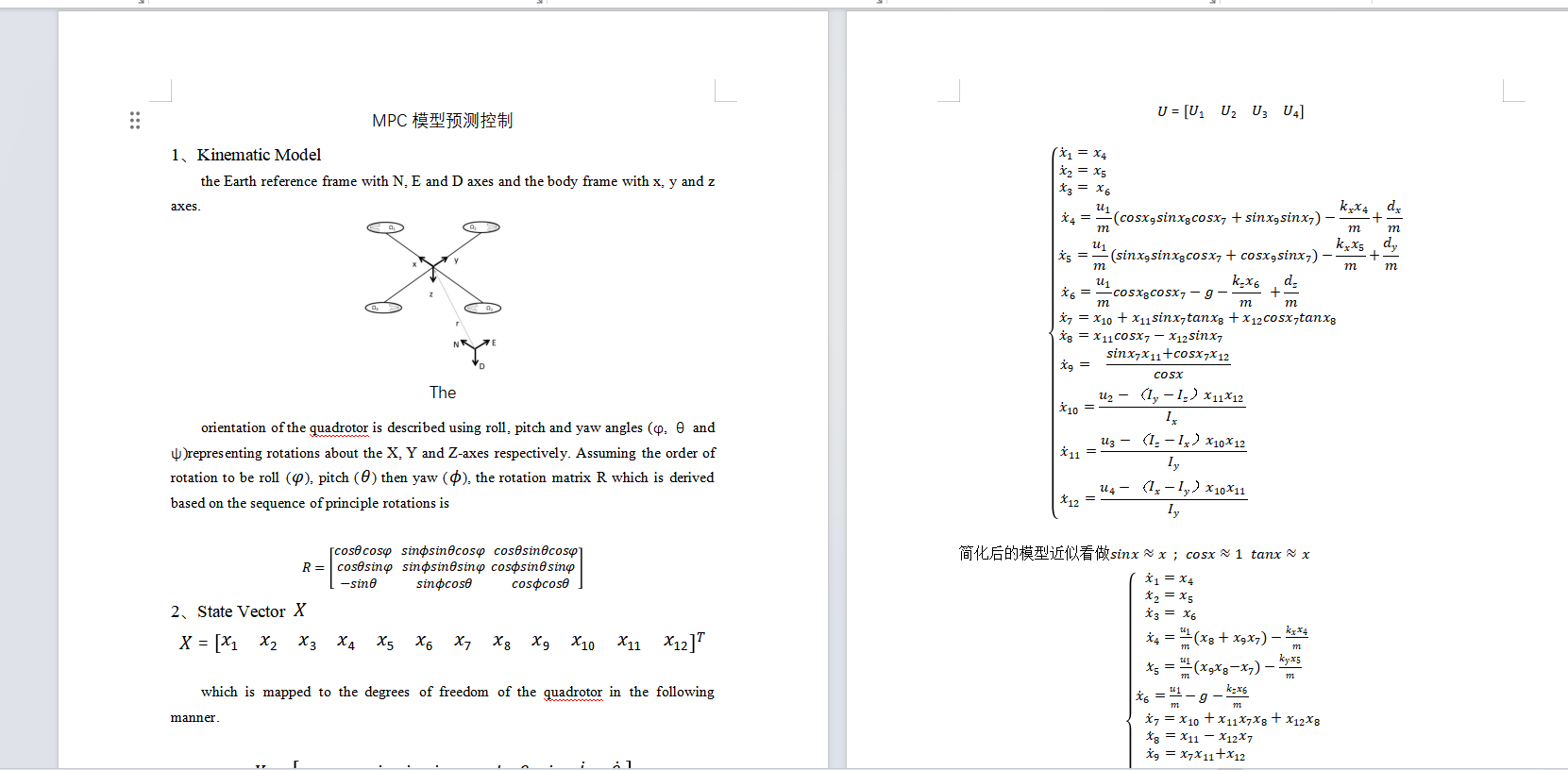
系统建模:首先需要建立四旋翼飞行器精确的非线性动力学模型。基于牛顿 - 欧拉方程,考虑飞行器的质量、转动惯量、旋翼升力和扭矩系数等参数,描述其在三维空间中的运动。这个模型将作为 MPC 中的预测模型,用于预测飞行器未来的状态。例如,模型可以描述飞行器在不同旋翼转速下,其位置、速度、姿态等状态变量随时间的变化。
-
轨迹预测:在每个采样时刻,MPC 利用建立的动力学模型,根据当前飞行器的状态和未来一段时间内的控制输入(假设值),预测飞行器在预测时域内的轨迹。例如,预测在未来几个采样周期内,飞行器的位置和姿态将如何变化。
-
优化求解:MPC 通过求解一个优化问题来确定当前时刻的最优控制输入。优化目标通常是使预测轨迹尽可能接近期望轨迹,同时满足飞行器的各种约束条件。例如,旋翼的转速不能超过其物理极限,飞行器的姿态变化也应在安全范围内。通过调整控制输入(即四个旋翼的转速),使得预测轨迹与期望轨迹之间的误差最小化。这个优化问题通常可以转化为二次规划问题,利用成熟的求解算法进行求解。
-
滚动优化:得到当前时刻的最优控制输入后,将其应用于四旋翼飞行器。在下一个采样时刻,获取飞行器的最新状态信息,重新进行轨迹预测和优化求解,更新控制输入。通过不断滚动优化,MPC 能够实时调整控制策略,以适应飞行器的动态变化和外界干扰,实现精确的轨迹跟踪。
![]()
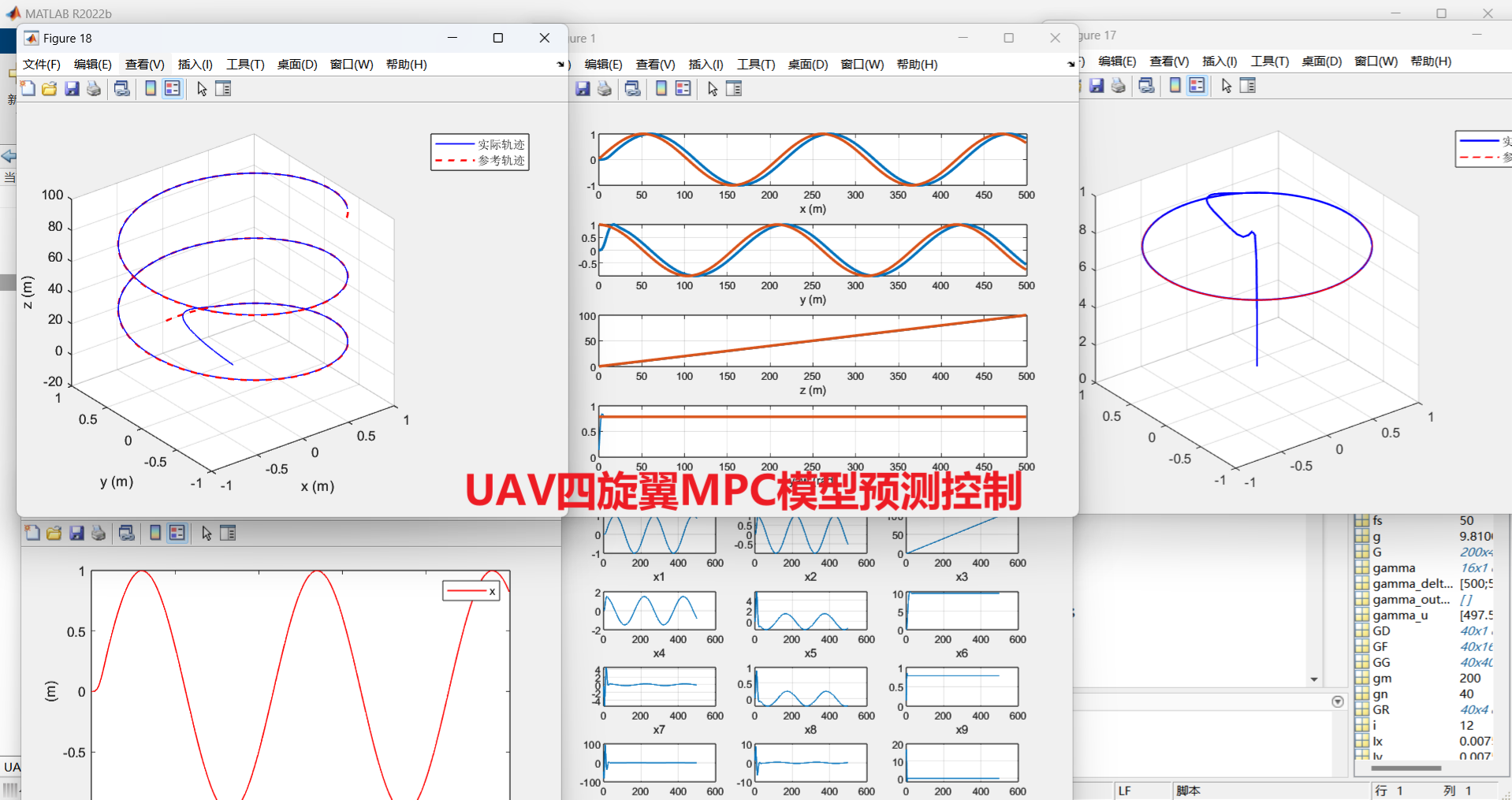
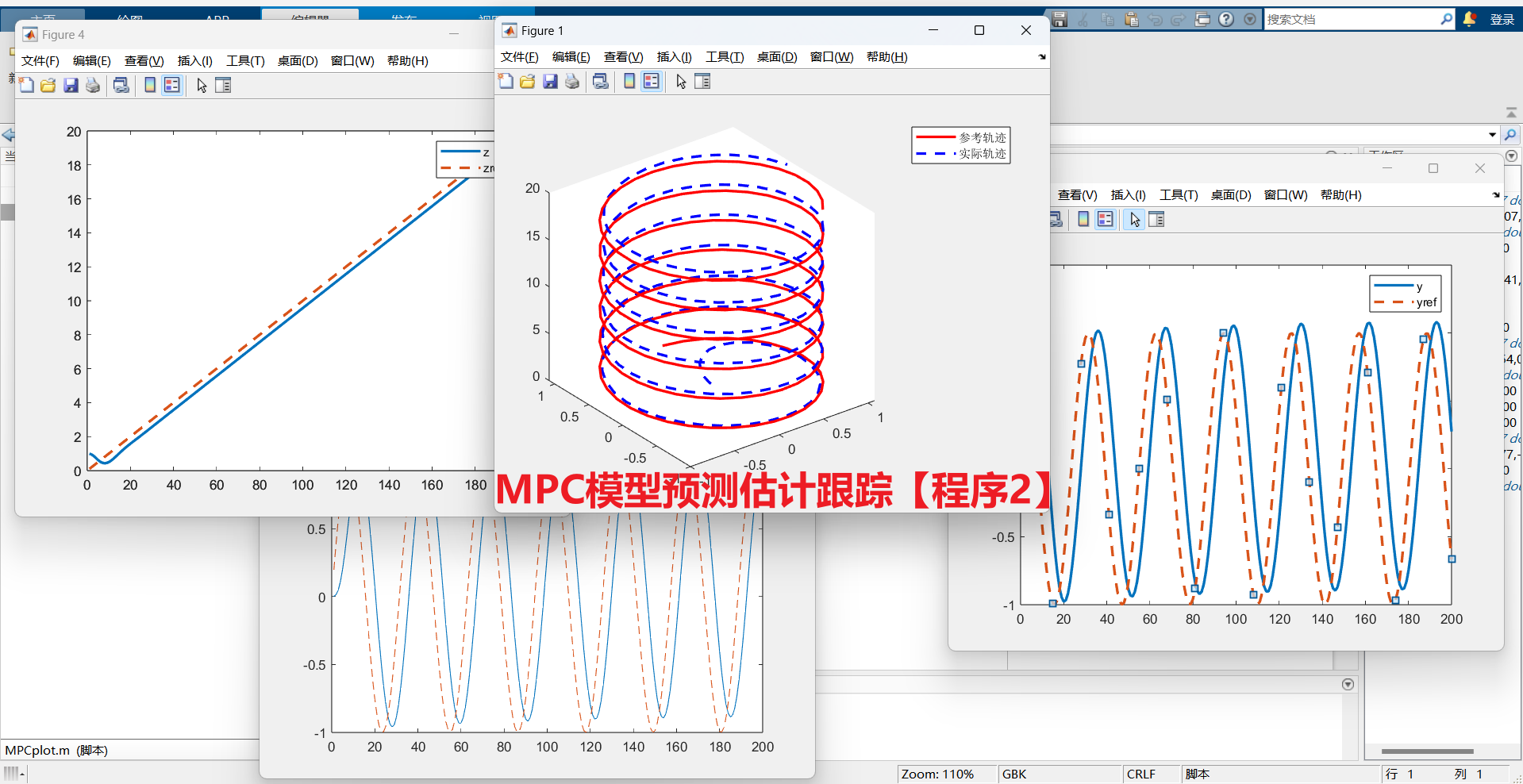
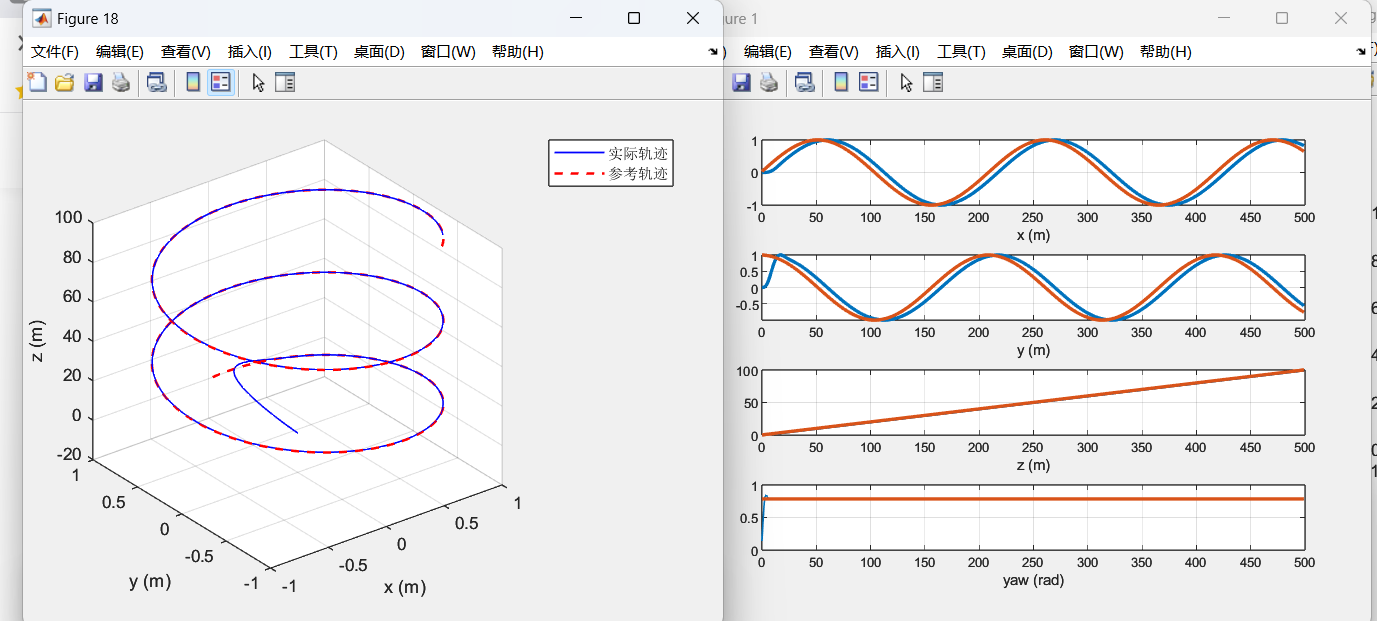
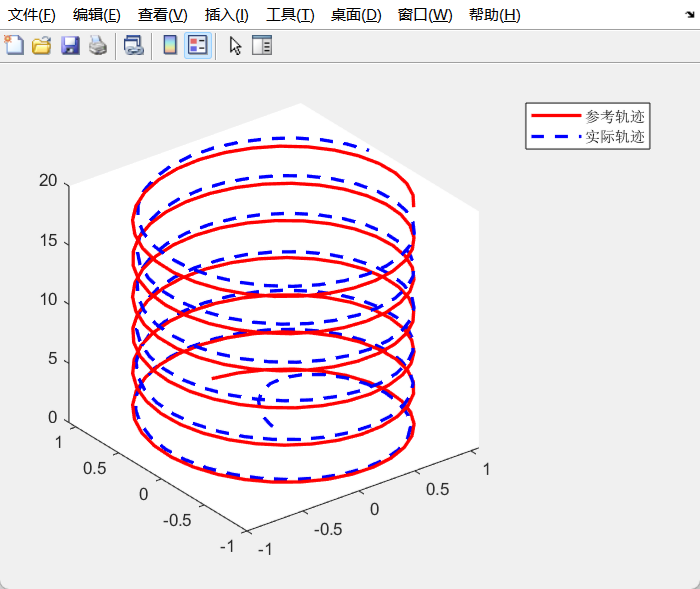
⛳️ 运行结果
![]()
📣 部分代码
![]()
🔗 参考文献
![]()
🍅往期回顾扫扫下方二维码
![]()
- END -
![]()

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献65条内容
已为社区贡献65条内容

所有评论(0)