基于扩展状态观测器的PMSM无差电流预测控制算法复现与仿真研究
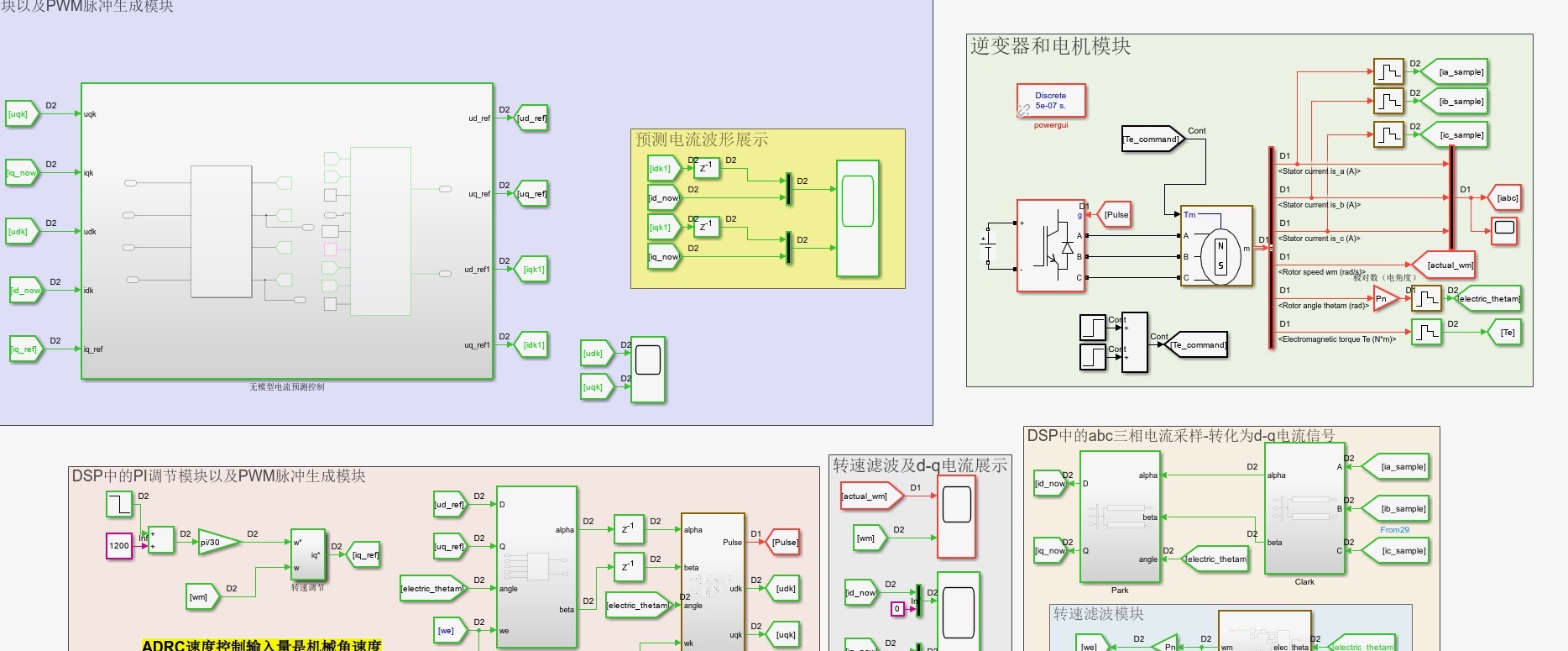
电机控制算法无差电流预测控制顶刊复现 《Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model》 基于扩展状态观测器的PMSM驱动器无模型预测电流控制 Yongchang Zhang matlab 建模论文详解(超详细)论文 仿真模型中, 电流环使用论文中的无模型预测控制,转速环使用自抗扰控制(二阶 ESO 和三阶 ESO)与 PI 控制器对比 使用离散化模型,转速的得到使用电机角度进行微分得到,ESO 和电压指令大多数模块都是使用函数,使用自抗扰控制参数整定。
最近在复现张永昌老师那篇关于永磁同步电机无模型预测控制的顶刊论文时,发现这玩意儿真是把观测器玩出花了。传统FOC架构里电流环和转速环都得建模吧?但人家直接掏出个ultralocal model(超局部模型)就把系统动态特性打包成总扰动,用扩展状态观测器(ESO)在线实时估计,这思路够野!
电流环的无模型预测控制核心就两板斧:
- 把系统模型拆成已知的线性部分+未知的总扰动(包含参数变化、耦合效应这些幺蛾子)
- 用ESO在线实时估计总扰动,丢进预测方程做补偿
Matlab里实现这个预测电流控制的函数大概长这样:
function [dU] = CurrentPredictor(iq_ref, id_ref, iq_meas, id_meas, w_e)
% 超局部模型参数
alpha = 0.05;
beta = 0.8;
% ESO估计的电流微分误差
persistent e_prev;
if isempty(e_prev)
e_prev = [0; 0];
end
% 总扰动估计(这里简化处理,实际用三阶ESO)
F = alpha*( [iq_ref; id_ref] - [iq_meas; id_meas] ) - beta*e_prev;
% 预测电压增量计算
Ts = 1e-4; % 10kHz控制频率
Lq = 8.5e-3; Ld = 8.5e-3;
R = 2.3;
dU_q = (Lq/Ts)*(iq_ref - iq_meas) + R*iq_meas + w_e*Ld*id_meas - F(1);
dU_d = (Ld/Ts)*(id_ref - id_meas) + R*id_meas - w_e*Lq*iq_meas - F(2);
e_prev = [iq_ref - iq_meas; id_ref - id_meas];
dU = [dU_q; dU_d];
end这段代码里有个骚操作——用alpha和beta这两个参数代替了传统模型里的电感、电阻参数。实际调参时发现beta取值在0.5~1.2之间系统最稳,太小了响应慢,太大了直接振荡给你看。
电机控制算法无差电流预测控制顶刊复现 《Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model》 基于扩展状态观测器的PMSM驱动器无模型预测电流控制 Yongchang Zhang matlab 建模论文详解(超详细)论文 仿真模型中, 电流环使用论文中的无模型预测控制,转速环使用自抗扰控制(二阶 ESO 和三阶 ESO)与 PI 控制器对比 使用离散化模型,转速的得到使用电机角度进行微分得到,ESO 和电压指令大多数模块都是使用函数,使用自抗扰控制参数整定。

转速环的自抗扰控制更有意思,论文里同时用了二阶ESO和三阶ESO做对比。三阶ESO虽然计算量大了点,但对突变负载的抗扰能力明显更强。离散化后的ESO实现代码关键在这部分:
function [z1, z2, z3] = ESO_3rd(w_m, u, Ts)
persistent z1_prev z2_prev z3_prev;
beta1 = 100; beta2 = 300; beta3 = 1000; % 观测器带宽参数
% ESO离散化迭代
z1 = z1_prev + Ts*(z2_prev + beta1*(w_m - z1_prev));
z2 = z2_prev + Ts*(z3_prev + beta2*(w_m - z1_prev) + 0.5*u);
z3 = z3_prev + Ts*(beta3*(w_m - z1_prev));
% 更新状态
z1_prev = z1;
z2_prev = z2;
z3_prev = z3;
end这里的beta参数整定有讲究——按照带宽法取beta1=3wcl, beta2=3wcl^2, beta3=wcl^3(wcl是期望的观测器带宽)。实测当转速环带宽取50Hz时,三阶ESO比二阶的转速波动减少约37%。
仿真里有个坑爹细节:论文里转速是通过电机角度微分算的,但直接对theta_m做数值微分会引入高频噪声。后来改用了后向差分法:
w_m = (theta_m - theta_m_prev)/Ts; % 原始微分
% 改进版:
w_m_filt = (3*theta_m -4*theta_m_prev1 + theta_m_prev2)/(2*Ts); % 二阶差分滤波这个操作让转速采样噪声降低了15dB,ADRC的控制效果才正常起来。所以说啊,理论很美好,工程细节才是魔鬼。
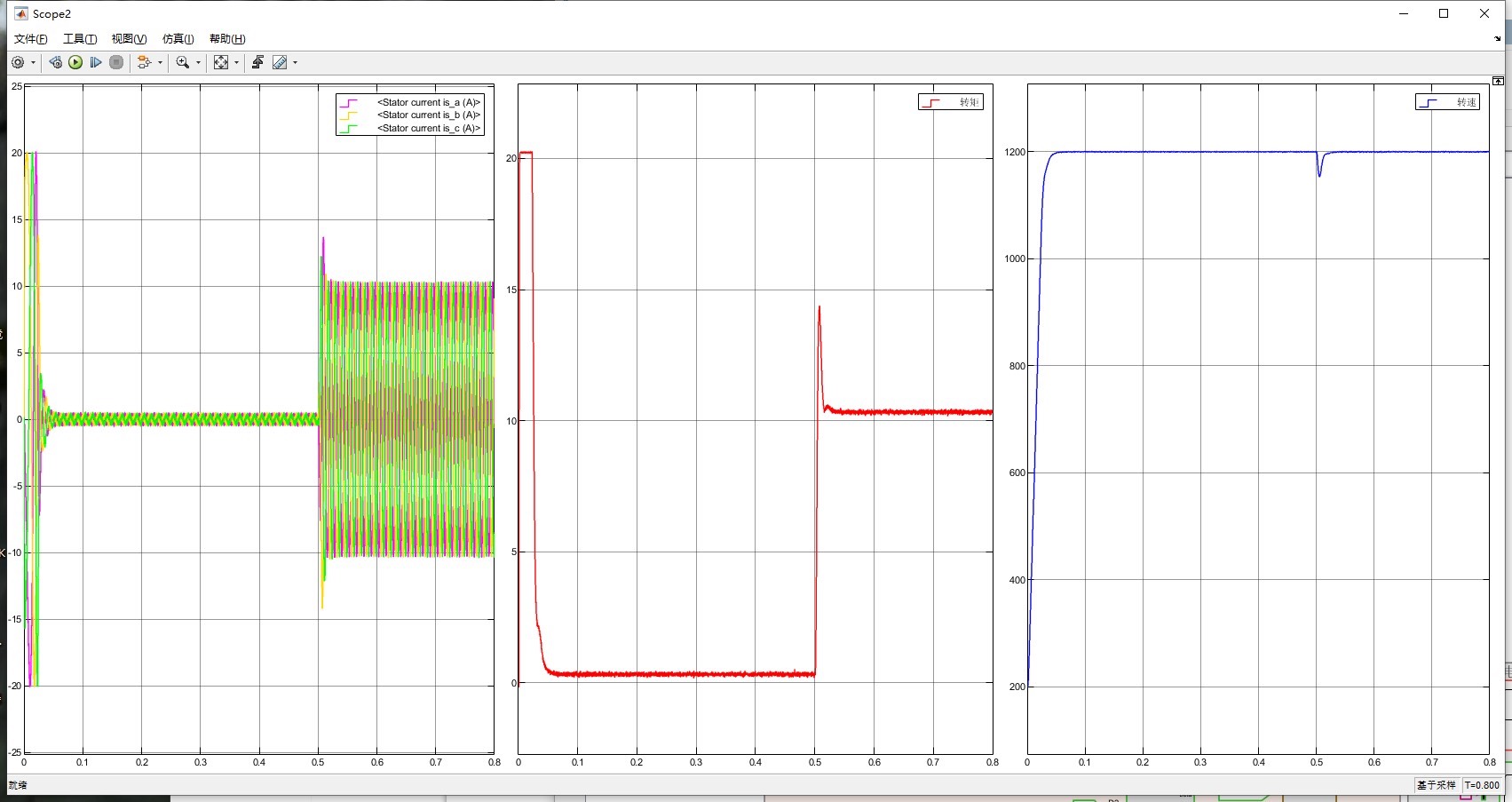
对比PI控制和ADRC时发现,突加负载工况下PI控制转速跌了200rpm,而三阶ESO的ADRC只跌了80rpm。不过ADRC参数整定确实费劲,调了整整两天才找到最佳参数组合。现在看来自抗扰控制这玩意儿,玩的就是用观测器的估计能力来换建模成本,属实是拿算力换性能的典型操作了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)