具身智能中的传感器技术7——感知技术概述1
·
摘要:本体感知是机器人实现自主运动的核心能力,主要包括三大传感系统:IMU(惯性测量单元)负责空间定位与平衡控制,相当于机器人的"前庭系统";关节编码器精确测量肢体位置,构建运动学模型;力矩传感器则实现力觉反馈,支持柔顺控制与人机交互。这些系统共同构成机器人的"小脑"功能,使其具备动态平衡、精准定位和安全交互等关键智能特性,为具身智能奠定感知基础。
本体感知
机器人不仅要“看”世界,首先必须清晰地感知**“自我”**的存在状态。
对于一个自由移动(Floating Base)的人形机器人来说,本体感知系统回答了三个关乎生存的问题:“我是正的还是歪的?”(平衡)、“我的肢体伸到了哪里?”(姿态)、“我接触世界的力道对不对?”(交互)。
本体感知 (Proprioception) —— 机器人的“小脑”与“肌肉”
这一系统构建了机器人的自我意识模型,是底层运动控制(Locomotion & Manipulation)的绝对基石。
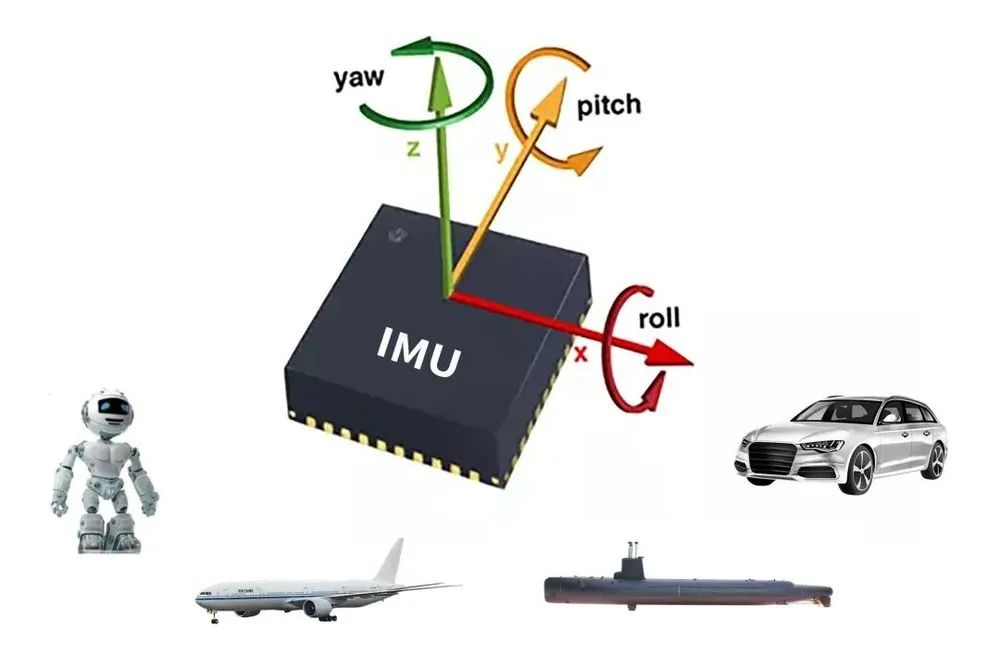
1. IMU (惯性测量单元) —— 机器人的“前庭系统”
- 生物学类比: 人类的内耳前庭(负责平衡感与空间定向)。
- 硬件形态: 工业级/战术级 高精度 MEMS 模组。
- 安装位置: 绝大多数安装在机器人的骨盆(Pelvis)或躯干几何中心。因为对于双足机器人,骨盆是全身运动链的根节点(Root Link),也是质心(CoM)波动最直接的反映点。
- 核心技术机制:
- 姿态解算 (Attitude Estimation): 通过 3轴陀螺仪(角速度)和 3轴加速度计(受力),实时计算躯干相对于重力矢量的倾斜角(Pitch/Roll)。这是防止跌倒的第一道防线。
- 状态观测器 (State Estimation): 在 GPS 失效的室内,单纯靠编码器无法得知机器人整体移动了多快。IMU 数据与腿部运动学数据融合(卡尔曼滤波),可以推算出机器人的奔跑速度和位移。
- 具身智能价值:
- 高动态平衡: 当机器人受到外部冲击(如被人猛推一把)时,IMU 是第一个感知到加速度突变的传感器,毫秒级触发**“迈步策略” (Stepping Strategy)** 来维持平衡,而不是像传统机器人那样直接停机报警。
2. 关节位置传感器 (Encoder) —— 机器人的“肌梭”
- 生物学类比: 肌梭(感受肌肉长度变化的感受器)。
- 硬件形态: 磁编码器(利用霍尔效应,耐脏抗震)或 光编码器(利用光栅衍射,精度极高)。通常集成在关节电机的尾部或减速器的输出端。
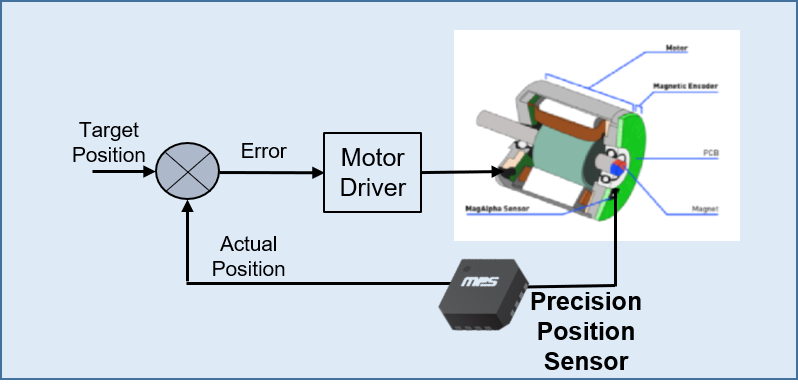
- 核心技术机制:
- 高分辨率反馈: 具身智能要求极高的控制精度,编码器精度通常在 16-20 bit(即一圈被分割成 6万到 100万个刻度)。这意味着指尖微米级的颤动都能被感知。
- 双编码器架构 (Dual Encoder): 高端关节会在电机端和减速器输出端各装一个。
- 电机端:负责 FOC 换向,保证电机转得顺。
- 输出端:负责测量关节最终角度,消除减速器齿轮间隙(Backlash)带来的误差,实现全闭环控制。
- 具身智能价值:
- 正运动学 (Forward Kinematics): 机器人闭着眼也能摸到鼻子,靠的就是读取全身几十个编码器的数值,通过数学公式算出指尖在空间中的 (x, y, z) 坐标。
- 绝对定位: 采用绝对值编码器,机器人开机瞬间就知道自己是什么姿势,不需要像老式打印机那样先“回零”复位。
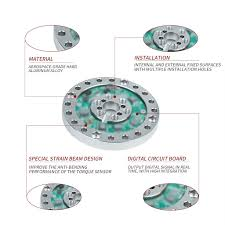
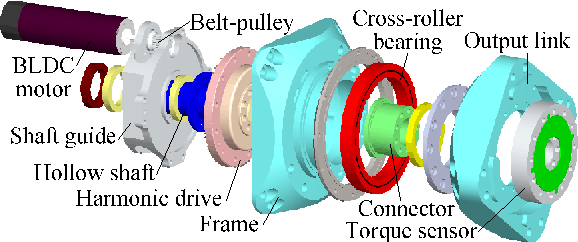
3. 关节力矩传感器 (Joint Torque Sensor) —— 机器人的“高尔基腱器官”
- 生物学类比: 高尔基腱器官(感受肌肉张力变化的感受器)。
- 硬件形态: 基于应变片(Strain Gauge)的弹性体,或电容式传感器。通常呈中空圆环状,安装在减速机与输出法兰之间。
- 核心技术机制:
- 力控 (Force Control): 传统工业机器人是“位置控制”(Position Control),只管走到坐标点,不管阻力多大,容易“硬碰硬”。加入力矩传感器后,机器人能实时感知关节承受的扭矩(牛顿·米)。
- 电流环估算 vs. 真实传感器: 低成本方案通过电机电流估算力矩(误差大);高端具身智能(如 KUKA iiwa, Franka, 宇树 H1)必须使用真实的力矩传感器,灵敏度可达 0.01 Nm。
- 具身智能价值:
- 柔顺控制 (Compliance/Impedance Control): 这是具身智能的灵魂。当人类触摸机器人时,传感器感知到阻力,控制器会模拟“弹簧”系统瞬间降低关节刚度,让手臂顺着人的力运动。
- 安全交互: 使得机器人可以走出铁笼子,与人并肩工作。一旦检测到异常碰撞力,毫秒级内停止输出,确保不伤人。
- 环境适应: 走在松软的草地或坚硬的水泥地上,脚踝感受到的反作用力不同,机器人据此调整落脚轻重。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)