基于Cruise和Simulink的整车动力经济性仿真与动力系统参数匹配研究
整车动力经济性仿真 纯电动汽车,混合动力汽车,动力系统参数匹配,动力经济仿真,制动能量回收控制策略开发 纯电动汽车动力经济性仿真,Cruise和Simulink联合仿真,提供Cruise整车模型和simuink策略模型,策略主要为BMS、再生制动和电机驱动策略,内含注释模型和详细解析文档,可运行 Cruise、MATLAB/siumlink联合仿真,整车仿真模型,增程式混合动力汽车(串联式混动构型) 可运行ece,nedc,ftp75等工况。 部分仿真图如下。 咸鱼现存模型几乎都没有模块注释 1.基于Cruise平台搭建整车部件等动力学模型,基于MATLAB/Simulink平台完成整车控制策略的建模,策略模型具备再生制动,行车驱动等功能,实现增程式构型车辆全部工作模式; 2.采用DLL联合仿真方式,完全采用正向建模思维,仿真模型具备较高精度; 3.可进行循环工况油耗,等速油耗,加速性能,爬坡性能,最高车速等动力性经济性计算仿真,cruise模型与Simulink策略不懂随时交流; Cruise 动力性,经济性仿真 动力系统参数匹配 纯电动汽车,混合动力汽车,双电机汽车 simulink控制策略开发,制动能量回收,转矩分配 联合仿真 Matlab/simulink模型,车辆工程纯电动汽车 Matlab/simulink模型,车辆工程 纯电动汽车 汽车动力学仿真 整车仿真,可进行动能回收 内含我录制的手把手使用和视频,有不懂的地方找我开腾讯会议教你修改成你需要的 包括PI控制的驾驶员子模型、刹车子模型、简易的双电机模型、轮子模型、电池模型、转矩分配策略 其中转矩分配策略为优先单电机运行 可以得到整车续航里程与耗电量,某工况下的速度拟合曲线 电动汽车动力系统匹配计算模型:输入整车参数及性能要求,一键生成驱动系统的扭矩功率峰值转速等参数。 2、整车动力经济性计算模型:包含NEDC/WLTC/CLTC工况,输入整车参数可生成工况电耗、百公里电耗、匀速工况续航、百公里电耗等信息。 实际项目中使用的计算仿真模型.
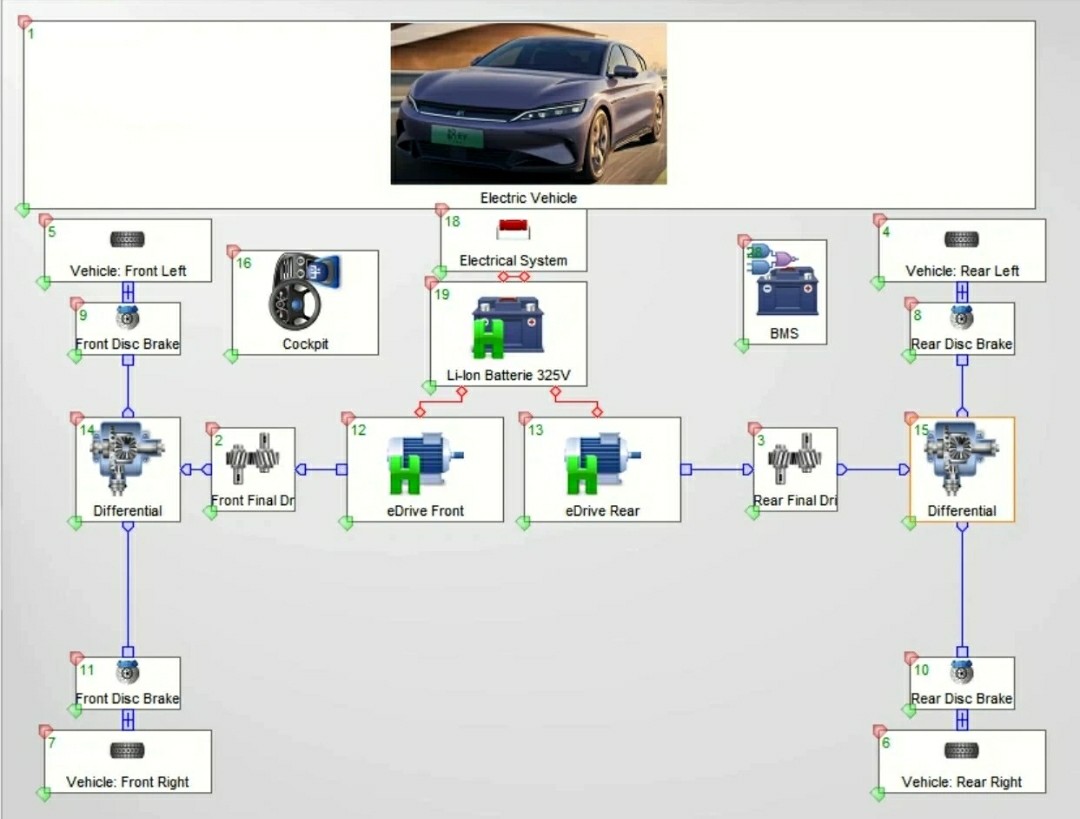
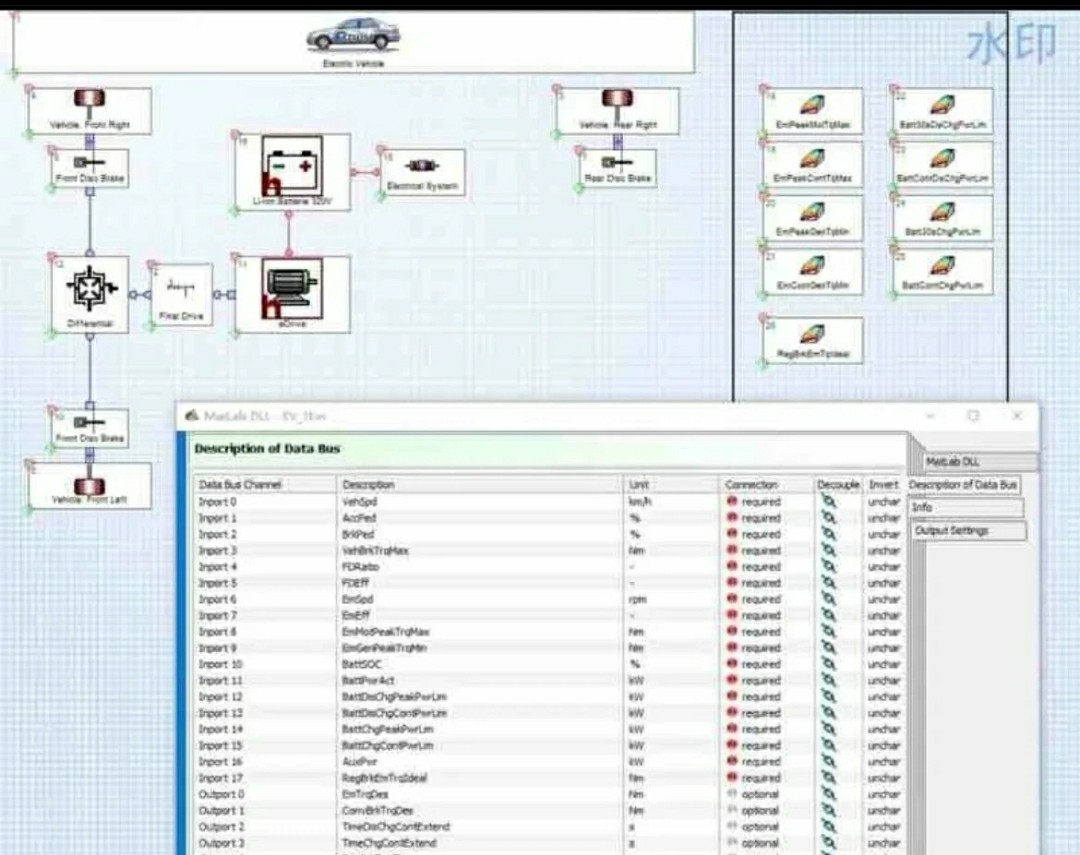
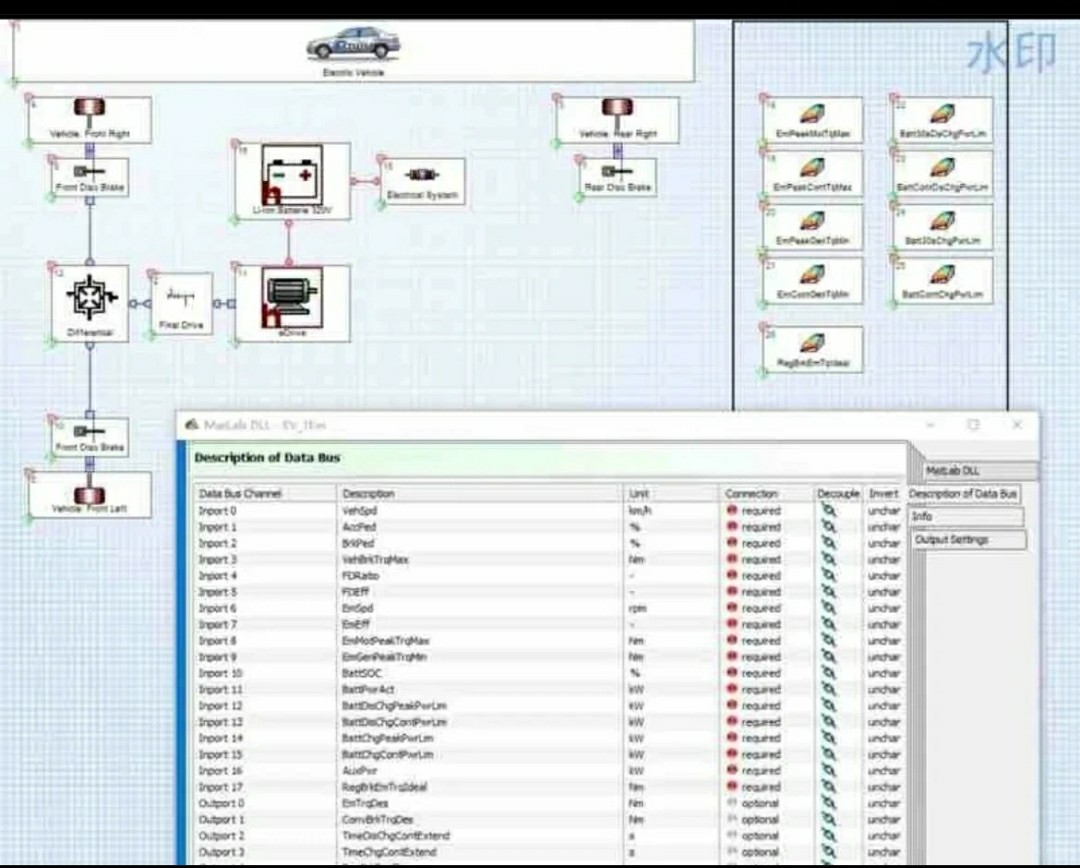
搞动力经济性仿真这行的都知道,模型注释比代码本身还金贵。去年接了个增程式混动项目,甲方甩过来一堆没注释的Cruise模型,那酸爽堪比生啃电路板。今天就拿我自己的实战模型拆开了说,咱们边看代码边聊门道。
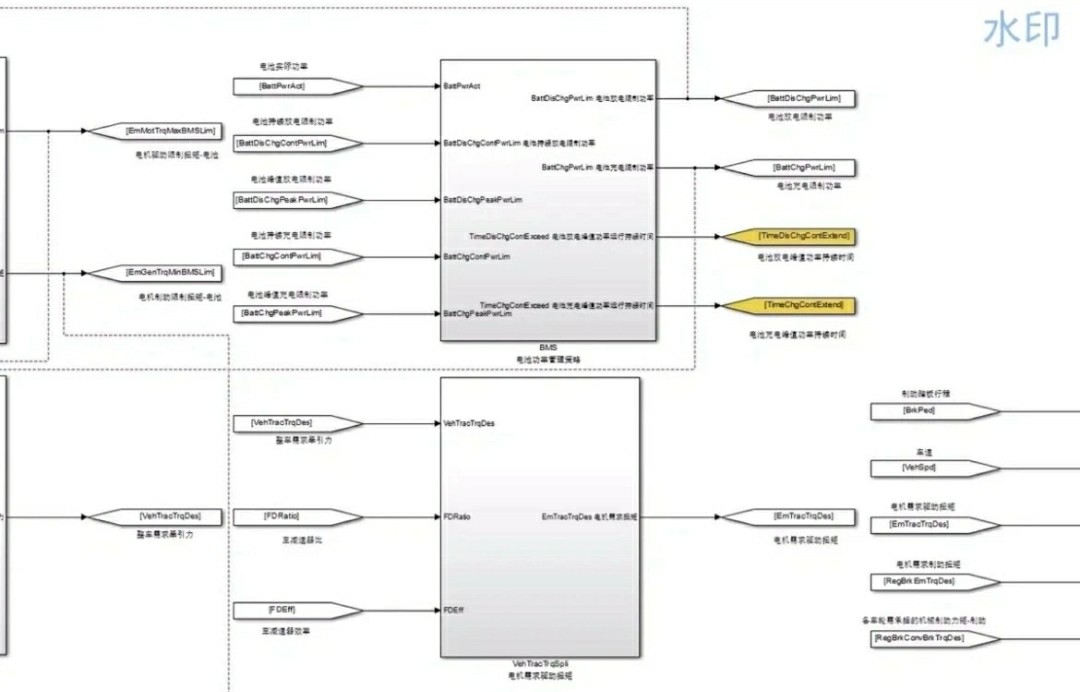
先看整车模型架构。Cruise里电机模块的扭矩响应曲线必须和Simulink里的控制策略严丝合缝,这俩就像奶茶和珍珠的关系。比如这个双电机扭矩分配策略的Simulink代码块:
function [motor1_trq, motor2_trq] = torque_distribution(req_trq)
% 优先单电机工作策略
if abs(req_trq) <= 120 % 单电机最大持续扭矩
motor1_trq = req_trq;
motor2_trq = 0;
else
motor1_trq = sign(req_trq)*120;
motor2_trq = req_trq - motor1_trq;
end
end这破玩意儿看着简单吧?但实际调试时发现,在NEDC工况40km/h匀速段,双电机切换瞬间会出现0.3秒的扭矩真空期。后来加了滞后区间才解决,所以说仿真模型里永远没有"完美解",只有"够用解"。
再生制动这块的PI控制器更是个祖宗。你们感受下这个车速跟踪模块的离散化实现:
classdef PID_Controller < handle
properties
Kp = 0.8;
Ki = 0.05;
integral_error = 0;
prev_error = 0;
end
methods
function u = step(obj, error, dt)
obj.integral_error = obj.integral_error + error * dt;
derivative = (error - obj.prev_error) / dt;
u = obj.Kp * error + obj.Ki * obj.integral_error;
obj.prev_error = error;
end
end
end这个类在FTP75工况下得反复调Ki值,大了会震荡,小了速度跟踪成蛇皮走位。后来我在模型里内置了自整定脚本,直接读取工况特征自动调整参数,这才算能用。
整车动力经济性仿真 纯电动汽车,混合动力汽车,动力系统参数匹配,动力经济仿真,制动能量回收控制策略开发 纯电动汽车动力经济性仿真,Cruise和Simulink联合仿真,提供Cruise整车模型和simuink策略模型,策略主要为BMS、再生制动和电机驱动策略,内含注释模型和详细解析文档,可运行 Cruise、MATLAB/siumlink联合仿真,整车仿真模型,增程式混合动力汽车(串联式混动构型) 可运行ece,nedc,ftp75等工况。 部分仿真图如下。 咸鱼现存模型几乎都没有模块注释 1.基于Cruise平台搭建整车部件等动力学模型,基于MATLAB/Simulink平台完成整车控制策略的建模,策略模型具备再生制动,行车驱动等功能,实现增程式构型车辆全部工作模式; 2.采用DLL联合仿真方式,完全采用正向建模思维,仿真模型具备较高精度; 3.可进行循环工况油耗,等速油耗,加速性能,爬坡性能,最高车速等动力性经济性计算仿真,cruise模型与Simulink策略不懂随时交流; Cruise 动力性,经济性仿真 动力系统参数匹配 纯电动汽车,混合动力汽车,双电机汽车 simulink控制策略开发,制动能量回收,转矩分配 联合仿真 Matlab/simulink模型,车辆工程纯电动汽车 Matlab/simulink模型,车辆工程 纯电动汽车 汽车动力学仿真 整车仿真,可进行动能回收 内含我录制的手把手使用和视频,有不懂的地方找我开腾讯会议教你修改成你需要的 包括PI控制的驾驶员子模型、刹车子模型、简易的双电机模型、轮子模型、电池模型、转矩分配策略 其中转矩分配策略为优先单电机运行 可以得到整车续航里程与耗电量,某工况下的速度拟合曲线 电动汽车动力系统匹配计算模型:输入整车参数及性能要求,一键生成驱动系统的扭矩功率峰值转速等参数。 2、整车动力经济性计算模型:包含NEDC/WLTC/CLTC工况,输入整车参数可生成工况电耗、百公里电耗、匀速工况续航、百公里电耗等信息。 实际项目中使用的计算仿真模型.
说到工况适配,不得不提那个自动生成续航数据的脚本。用MATLAB的timetable处理CLTC工况数据时,发现原始数据采样率不统一会直接崩掉。后来写了段数据清洗代码:
function cleaned_data = preprocess_cycle(raw_data)
% 处理异常采样间隔
time_diff = diff(raw_data.Time);
mode = mode(time_diff);
outliers = find(time_diff ~= mode);
% 线性插值修补
for idx = outliers'
new_time = raw_data.Time(idx) + mode;
new_row = timetable(new_time, 'RowTimes', 'Time');
raw_data = [raw_data(1:idx,:); new_row; raw_data(idx+1:end,:)];
end
cleaned_data = retime(raw_data,'regular','linear');
end这代码救过三个研究生的毕业设计——他们拿到的路谱数据全是从不同设备导出的,时间戳乱得像沙尘暴后的键盘。
模型验证阶段有个经典翻车现场:某次仿真显示等速续航比厂家标称值高20%,查了两天发现是Cruise里轮胎滚动阻力系数设成了0.006(实际应该0.008)。现在我的模型里都内置参数合理性检查:
function validate_parameters(params)
if params.tire_rrc < 0.007 || params.tire_rrc > 0.012
warning('轮胎滚阻系数%.3f异常,典型值0.008-0.010', params.tire_rrc);
end
% 其他参数检查...
end玩仿真这行最大的教训就是:永远别相信手输的参数,就算是你自己昨天刚输的。
现在说点干货,做参数匹配千万别直接怼算法。比如这个电机峰值功率计算函数:
function [power, torque] = match_motor(grade_req, speed_req)
% 满足30%坡度@60km/h要求
grade_force = vehicle_mass * 9.8 * sind(30);
wheel_torque = grade_force * tire_radius;
motor_torque = wheel_torque / final_ratio;
power = (motor_torque * wheel_speed) / 9549; % 9549是单位转换系数
% 留15%余量
torque = motor_torque * 1.15;
power = power * 1.15;
end看着挺合理是吧?但实际项目中发现电机持续工作温度对输出影响能达到8%,所以现在模型里都集成热衰退补偿模块。
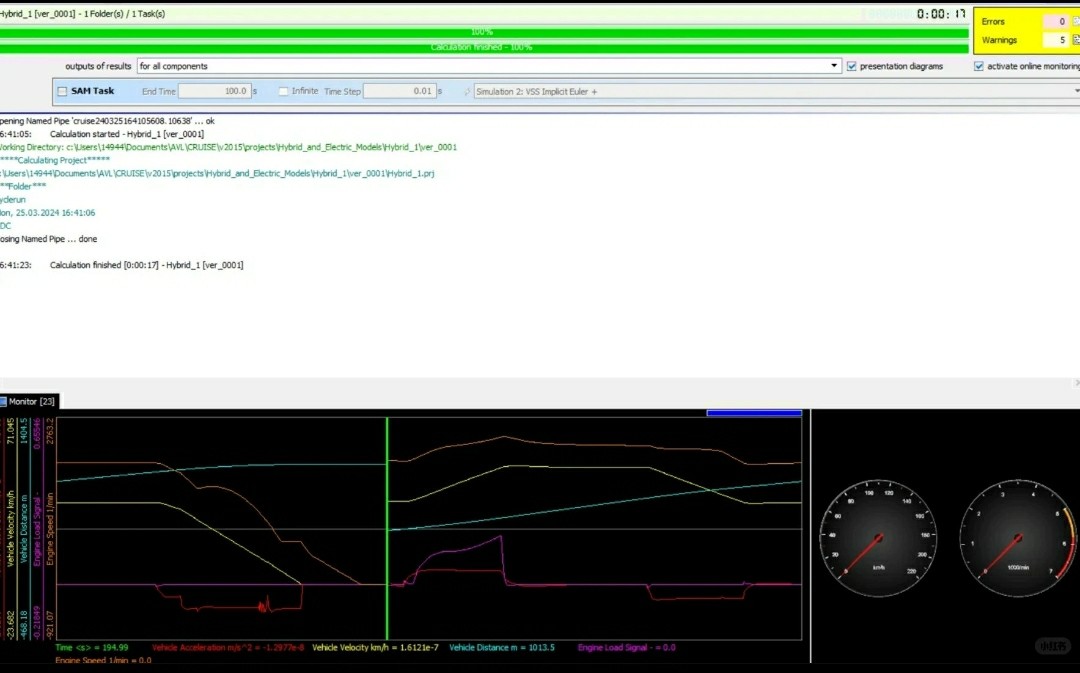
最后给个忠告:仿真结果和实车误差超过5%就要准备跑路。上次有个师弟拿我的模型去仿某新势力车型,结果电耗误差2.3%——厂家直接派人来问是不是挖了他们测试数据。你看,模型太准也有风险不是?

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)