【MATLAB例程】多无人机协同巡逻仿真:基于长机-僚机模型的编队保持与串级PID控制
·
基于 MATLAB 开发的多无人机(UAV)协同编队巡逻仿真系统。它采用了经典的长机-僚机(Leader-Follower)控制架构,深度融合了六自由度(6-DOF)非线性动力学模型与双闭环串级 PID 控制算法。通过集中式路径规划与分布式误差反馈机制,系统实现了多机在复杂巡逻航点下的菱形编队精准保持。
MATLAB打开后即可直接运行,包运行成功。原创代码,仅供学习和研究,请勿翻卖
程序介绍
物理模型与坐标系
程序内置了非线性六自由度(6-DOF)无人机动力学模型。通过旋转矩阵 R R R 将机体坐标系下的推力转换至惯性坐标系,并考虑了空气动力阻尼(线性阻尼与旋转阻尼),确保了仿真环境的逼真度。
长机-僚机协同策略
- 集中式路径规划:地面站预设leader_wps,长机根据当前位置与目标的距离自动判定并切换下一航点。
- 分布式队形反馈:僚机的期望位置不仅取决于长机广播的坐标和固定的 formation_offset,还引入了 formation_gain。
- 计算公式: P c m d = P l e a d e r + O f f s e t + K f ( O f f s e t − O f f s e t a c t u a l ) P_{cmd} = P_{leader} + Offset + K_{f}(Offset - Offset_{actual}) Pcmd=Pleader+Offset+Kf(Offset−Offsetactual)。
- 这种设计增强了僚机在长机剧烈转向时的跟随速度。
串级 PID 控制器逻辑
每一架无人机均独立运行一套级联控制算法:
- 外环(位置环):输入空间误差,输出期望加速度。
- 姿态解算层:将期望加速度解算为目标横滚角(Roll)和俯仰角(Pitch)。
- 内环(姿态环):输入角度误差,输出控制力矩(Torque)。
运行结果
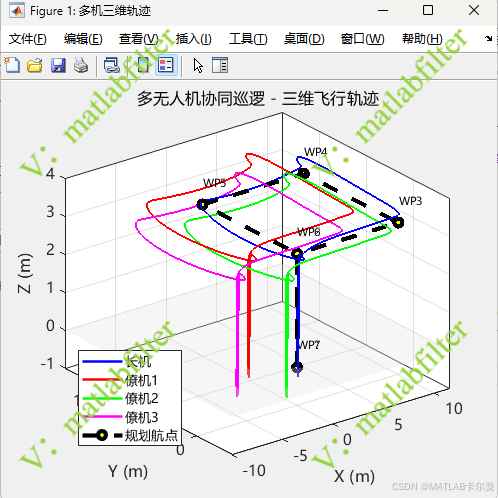
本程序模拟了 1架长机(Leader)+ 3架僚机(Follower) 的协同巡逻任务。系统运行后将生成三张关键的分析图表:
- 多无人机三维轨迹图:直观展示四架无人机如何维持菱形编队完成起飞、前飞、直角转向及返航降落的全过程。图中清晰标出了长机的规划航点(Waypoints)。
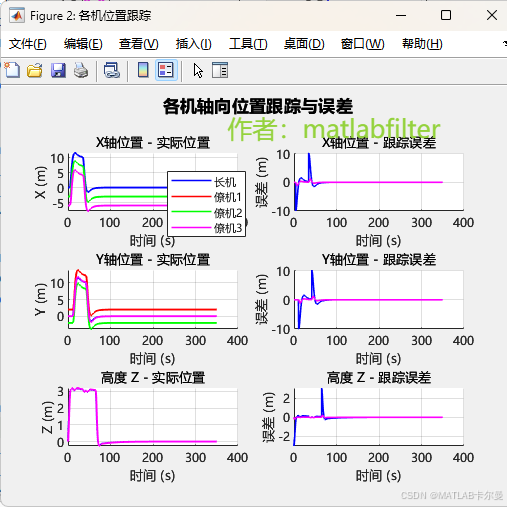
- 轴向位置跟踪与误差图:详细对比了各架无人机在 X、Y、Z 三个轴向上的实际位置与期望位置,展示了级联 PID 控制器在高动态转向时的鲁棒性。
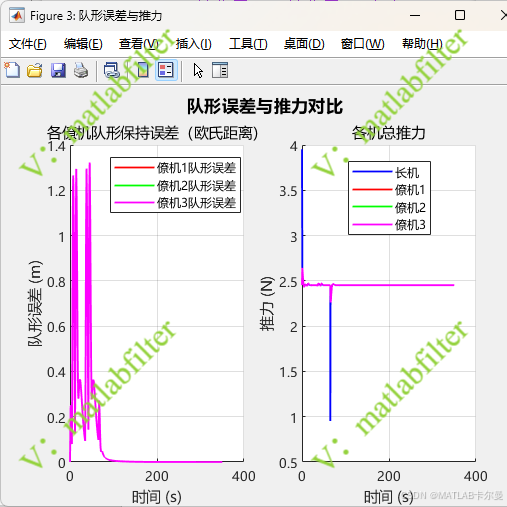
- 队形误差与推力对比图:
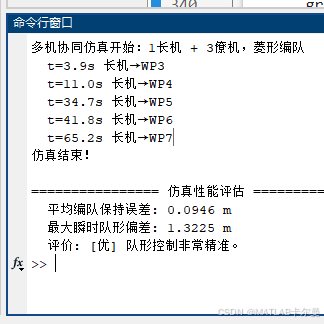
- 左侧记录了三架僚机相对于长机的实时位置偏差(欧氏距离),验证了在分布式反馈增益作用下,编队误差能迅速收敛至厘米级。
- 右侧展示了各机电机的总推力输出,反映了物理限幅对系统的实际约束。
- 命令行截图:
MATLAB源代码
部分代码如下:
% 多无人机协同巡逻仿真 - 长机/僚机队形保持
% 控制架构:集中式调度 + 分布式执行
% · 地面站(集中调度):规划长机航点,广播队形偏移量
% · 长机(Leader) :跟踪全局航点,串级PID控制
% · 僚机(Follower) :跟踪"长机位置 + 队形偏移",
% 作者:matlabfilter(V同号,除前期达成一致外,付费咨询)
% 2026-03-26/Ver1
clc; clear; close all;
rng(0);
%% 全局仿真参数
dt = 0.01; % 仿真步长 s
T = 350; % 总仿真时长 s
N = round(T / dt);
%% 无人机物理参数(主机、僚机相同)
p.g = 9.81;
p.mass = 0.25;
p.Ixx = 0.012;
p.Iyy = 0.012;
p.Izz = 0.020;
p.kd_lin = 0.10;
p.kd_ang = 0.05;
%% 长机航点(全局巡逻路径)
leader_wps = [
0, 0, 0; % WP1: 地面起始
0, 0, 3; % WP2: 起飞至3m
10, 0, 3; % WP3: 向前
10, 10, 3; % WP4: 右转
0, 10, 3; % WP5: 左转
0, 0, 3; % WP6: 返回
0, 0, 0; % WP7: 降落
];
switch_dist = 0.5; % 航点切换阈值 [m]
%% 队形偏移量定义(机体坐标系偏移,相对长机)
% 菱形编队:长机居中,3架僚机分别在后左、后右、正后
% 偏移量 [dx, dy, dz](m),dz可设不同高度分层避碰
n_followers = 3;
formation_offset = [
-3, 2, 0; % 僚机1:左后
-3, -2, 0; % 僚机2:右后
-6, 0, 0; % 僚机3:正后(双层备份机)
];
完整代码:
https://download.csdn.net/download/callmeup/92764324
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 20
20 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)