【信息科学与工程学】计算机科学与自动化——第八十一篇 分布式云操作系统 第二章节01
第一步:知识体系结构化(分类与索引)
分层分类法,并为每个类别分配一个唯一的“流程编号”前缀。
-
支柱A:数学基础
-
A1. 分析、几何与拓扑 (前缀:
MATH-AN-GEO-)-
包含:现代分析、微分几何、代数拓扑、PDE理论等。
-
-
A2. 代数、逻辑与离散数学 (前缀:
MATH-ALG-DIS-)-
包含:抽象代数、数理逻辑、图论、组合数学、计算复杂性等。
-
-
A3. 概率、统计与随机过程 (前缀:
MATH-PROB-STAT-)-
包含:随机分析、统计学习理论、信息论、随机过程等。
-
-
A4. 计算、优化与控制 (前缀:
MATH-COMP-OPT-)-
包含:数值分析、优化理论、控制理论、运筹学等。
-
-
-
支柱B:计算科学与工程
-
B1. 计算物理与工程数学 (前缀:
CSE-PDE-CME-)-
包含:有限元法、计算流体力学、多物理场耦合、材料计算等。
-
-
B2. 科学计算与高性能计算 (前缀:
CSE-HPC-)-
包含:并行计算算法、自适应网格、任务调度、误差分析等。
-
-
-
支柱C:计算机科学与工程
-
C1. 计算机系统 (前缀:
CSE-SYS-)-
包含:体系结构、操作系统、计算机网络、编译原理等。
-
-
C2. 人工智能与机器学习 (前缀:
CSE-AI-ML-)-
包含:机器学习理论、深度学习、强化学习、计算机视觉等。
-
-
C3. 软件工程与形式化方法 (前缀:
CSE-SE-FM-)-
包含:形式化验证、软件架构、领域特定语言等。
-
-
C4. 机器人学与控制工程 (前缀:
CSE-ROB-CTRL-)-
包含:运动规划、状态估计、先进控制策略等。
-
-
-
支柱D:工业软件与特定应用
-
D1. 工业数字孪生与CPS (前缀:
APP-DT-CPS-) -
D2. 计算机辅助工程 (前缀:
APP-CAD-CAE-CAM-) -
D3. 工业物联网与平台 (前缀:
APP-IIOT-PLT-)
-
分布式随机梯度下降
SE-HPC-0001,因为它直接关联分布式云操作系统的核心任务(大规模分布式训练)
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
并行计算算法 / 优化算法 / 机器学习 |
|
模型配方 |
问题:最小化经验风险 J(w)=N1∑i=1NL(f(xi;w),yi),其中 w∈Rd是模型参数,L是损失函数,(xi,yi)i=1N是训练数据集。 |
|
算法/模型/方法名称 |
分布式随机梯度下降(Distributed Stochastic Gradient Descent, DSGD)—— 同步参数平均(Synchronous SGD with Model Averaging) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 问题定义与分解: |
|
python完整代码(要求可执行)实现 |
|
|
精度/密度/误差/强度 |
- 收敛精度:在强凸、平滑问题下,能达到 O(1/KT)的次线性收敛速率(K为节点数,T为总迭代数)。非凸问题下通常收敛到驻点。 |
|
理论基础和规律 |
- 优化理论:随机梯度下降的收敛性分析(Robbins-Monro条件)。 |
|
应用场景和各类特征 |
- 场景:大规模深度神经网络训练(如图像分类、自然语言处理)、逻辑回归、矩阵分解等。 |
|
数学特征 |
- 集合:参数空间 Rd, 数据空间 X×Y。 |
|
语言特征 |
- 描述性语言:分布式、同步、迭代、平均、收敛、周期、屏障。 |
|
时序和交互流程的所有细节/分步骤时序情况及数学方程式 |
0. 初始化时序: |
|
复杂度 |
- 时间:计算复杂度 O(T⋅d⋅(N/K))。 通信复杂度 O(T/H⋅d⋅K)(对于All-Reduce是 O(T/H⋅d⋅logK))。总时间受限于最慢节点和通信延迟。 |
|
GPU芯片执行的各类指令和指令代码情况和各类硬件芯片执行调度 |
在NVIDIA GPU (例如A100) 上的近似执行流程: |
基于李群SE(3)的分布式位姿图优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
几何与代数在工程中的应用 / 机器人学算法 / 分布式优化 |
|
模型配方 |
问题:一个由 K个机器人组成的集群在未知环境中移动。每个机器人 k通过自身传感器获得一系列局部位姿观测和机器人间的相对位姿观测(例如通过视觉特征匹配或UWB测距)。 |
|
算法/模型/方法名称 |
基于李代数扰动模型的分布式位姿图优化(采用ADMM共识优化框架) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
核心思想:将每个机器人的位姿变量 Ti定义在李群 SE(3)上。通过李代数 se(3) 在切空间中进行局部线性化,将流形上的非线性优化转化为一系列欧氏空间(切空间)中的凸优化子问题,从而可以在分布式环境下求解。 |
|
python完整代码(要求可执行)实现 |
```python |
|
精度/密度/误差/强度 |
- 精度:在良好初始值和充分通信下,能实现厘米级定位精度。精度受限于传感器噪声模型(信息矩阵)、数据关联正确性以及通信延迟导致的共识偏差。 |
|
理论基础和规律 |
- 李群与李代数:为旋转和刚体运动提供了连续的、可微的流形结构,是局部线性化的基础。 |
|
应用场景和各类特征 |
- 场景:多机器人协同勘探、无人机编队建图、自动驾驶车队协同定位、分布式AR/VR。 |
|
数学特征 |
- 几何:核心在流形 SE(3)上操作,这是一个光滑的微分流形,也是李群。 |
|
语言特征 |
- 几何语言:流形、切空间、指数映射、测地线、扰动。 |
|
时序和交互流程的所有细节/分步骤时序情况及数学方程式 |
0. 初始化:各机器人 k初始化本地位姿估计 Tk,(0), 共识变量 zk(0), 乘子 λk(0)=0。设定超参数 ρ和最大迭代次数。 |
|
复杂度 |
- 时间:每个机器人局部优化的复杂度为 O((nk+mk)⋅d3), 其中 nk是其位姿变量数,mk是相关边数,d=6是位姿自由度。共识步骤的通信复杂度为 O(s⋅d⋅logK), s为共享变量数。 |
|
GPU芯片执行的各类指令和指令代码情况和各类硬件芯片执行调度 |
在异构分布式系统中的执行: |
总结
这个示例展示了“李群与李代数”如何作为核心数学工具,嵌入到“分布式云操作系统”所管理的物理空间智能体协同任务中。它解决了以下关键问题:
-
表示:用 SE(3)无歧义、紧凑地表示机器人的三维位姿。
-
计算:通过 se(3)实现流形上的微积分,使非线性优化可行。
-
分布式化:结合ADMM等分布式优化框架,将全局地图构建问题分解到各个机器人,并通过共识协议保持一致性。
李群与李代数在分布式控制系统中的数学方法
数学方法框架:李群与李代数在分布式控制系统中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
几何与代数在工程中的应用 / 机器人运动学与控制 / 分布式系统理论 |
|
模型配方 |
问题:考虑一个由N个智能体(机器人、无人机、自动驾驶车辆)组成的分布式系统,每个智能体的状态存在于李群G上(通常为SO(3)或SE(3))。系统需要在分布式约束下实现:1) 姿态同步;2) 编队控制;3) 协同任务规划。 |
|
算法/模型/方法名称 |
基于李代数线性化的分布式模型预测控制与状态估计协同框架 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 系统状态与运动学模型 |
|
理论基础和规律 |
1. 李群与李代数理论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
代数特征: |
|
语言特征 |
几何语言:流形、切空间、切向量、余切空间、余切丛、向量场、微分形式、李导数、李括号、弗罗贝尼乌斯定理、分布、叶状结构 |
|
时序和交互流程的所有细节/分步骤时序情况及数学方程式 |
0. 初始化阶段 (t=0) |
|
复杂度 |
计算复杂度: |
|
GPU芯片执行的各类指令和指令代码情况和各类硬件芯片执行调度 |
硬件架构概览: |
这个框架完整展示了李群与李代数在分布式控制系统中的应用,涵盖了从数学基础到硬件实现的全链条细节。通过这个框架,可以在实际工程中实现高效、鲁棒的分布式协同控制系统。
李群与李代数在分布式系统中的三个深度数学方法框架
李群与李代数在分布式系统中的深度数学方法框架。由于您要求取消代码,我将专注于数学理论、算法框架和工程应用细节。
条目1:基于李群SO(3)的分布式旋转平均算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
几何与代数在工程中的应用 / 多视角几何 / 分布式优化 |
|
模型配方 |
问题:给定一个由N个相机(节点)组成的网络,每个节点i观测到相对于其他节点j的相对旋转Rij∈SO(3),这些观测可能含有噪声。目标是分布式地计算每个节点的绝对旋转Ri∈SO(3),使得对于所有观测边(i,j)∈E,一致误差∥Ri−RijRj∥最小化。 |
|
算法/模型/方法名称 |
黎曼共识梯度下降法(Riemannian Consensus Gradient Descent) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 流形上的优化问题重构 |
|
理论基础和规律 |
1. 李群与李代数理论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
代数特征: |
|
语言特征 |
旋转矩阵、四元数、轴角表示、罗德里格斯公式、李群、李代数、指数映射、对数映射、切空间、黎曼梯度、测地线、连接性、代数连通性、临界点、局部极小值。 |
|
时序和交互流程的所有细节/分步骤时序情况及数学方程式 |
0. 初始化阶段 |
条目2:基于李群SE(3)的分布式模型预测控制
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
机器人学算法 / 控制理论 / 分布式模型预测控制 |
|
模型配方 |
问题:N个机器人组成的编队,每个机器人i的状态为Xi=(Ri,pi)∈SE(3),控制输入为体速度ξi=(ωi,vi)∈R6。动力学:X˙i=Xiξ^i。目标:分布式地计算控制输入,使得机器人编队跟踪期望轨迹Xiref(t),同时满足避碰约束∥pi−pj∥≥dmin,控制输入约束ξi∈Ui,并最小化总代价。 |
|
算法/模型/方法名称 |
分布式序列二次规划模型预测控制(Distributed Sequential Quadratic Programming MPC) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 集中式最优控制问题 |
|
理论基础和规律 |
1. 李群上的控制系统理论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
代数特征: |
|
时序和交互流程 |
每个控制周期: |
条目3:数字孪生中的分布式状态估计与同步
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
工业数字孪生与CPS / 状态估计 / 分布式系统 |
|
模型配方 |
问题:物理空间中N个实体(机器人、AGV、传感器节点),每个实体状态Xi∈SE(3)。数字孪生体需要实时估计所有实体状态,并与物理实体同步。每个实体有本地传感器(IMU、视觉、UWB等),测量模型yi=hi(Xi)+vi。目标:设计分布式估计算法,使得数字孪生体和各实体获得一致、准确的状态估计。 |
|
算法/模型/方法名称 |
基于李群SE(3)的分布式扩展信息滤波(Distributed Extended Information Filter on SE(3)) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 集中式扩展卡尔曼滤波(EKF)在SE(3)上 |
|
理论基础和规律 |
1. 估计理论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
概率特征: |
|
时序和交互流程 |
实体端流程: |
总结
这三个条目展示了李群与李代数在分布式系统中的不同应用层面:
-
MATH-ALG-GEO-0002:数学基础层,解决流形上的分布式优化问题,核心是黎曼优化理论在旋转同步中的应用。
-
CSE-ROB-CTRL-0001:控制算法层,将流形上的状态表示与分布式模型预测控制结合,解决多机器人编队控制问题。
-
APP-DT-CPS-0001:系统应用层,在数字孪生系统中实现分布式状态估计与同步,体现了信息物理融合的思想。
这三个框架共同构成了从数学理论到工程应用的完整链条,展示了李群与李代数在分布式云操作系统中的核心价值。每个框架都包含了从问题建模、算法设计、收敛性分析到时序流程的完整细节,可以直接用于系统实现。
分布式云操作系统中的关键数学方法,涵盖控制理论、计算几何和随机优化三个方向。
条目4:分布式滑模控制与自适应控制
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
控制科学与工程核心 / 非线性控制 / 分布式控制 |
|
模型配方 |
问题:考虑N个具有匹配不确定性和外部干扰的欧拉-拉格朗日系统的协同控制问题。每个智能体i的动力学为: |
|
算法/模型/方法名称 |
分布式自适应积分滑模控制(Distributed Adaptive Integral Sliding Mode Control) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 同步误差定义 |
|
理论基础和规律 |
1. 滑模控制理论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
非线性系统特征: |
|
时序和交互流程 |
控制周期: |
条目5:计算几何在路径规划中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
计算机辅助工程 / 计算几何 / 运动规划 |
|
模型配方 |
问题:在三维工作空间中,为多个机器人规划无碰撞路径。工作空间包含静态障碍物Ok⊂R3和动态障碍物。每个机器人Ai的构型空间Ci=SE(3)。目标:寻找连续路径πi:[0,1]→Ci,使得: |
|
算法/模型/方法名称 |
分布式抽样运动规划算法(Distributed Sampling-based Motion Planning) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 构型空间建模 |
|
理论基础和规律 |
1. 计算几何基础 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
几何特征: |
|
时序和交互流程 |
规划周期: |
条目6:随机优化在资源分配中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
计算、优化与控制 / 随机优化 / 资源分配 |
|
模型配方 |
问题:云数据中心有M台服务器,需要为N个时变工作负载分配计算资源。每个工作负载j在每个时隙t有随机到达的请求量Dj(t),服务质量要求(延迟约束)。每台服务器i有处理能力Ci,能耗函数Pi(ui),其中ui为利用率。目标:最小化长期平均总能耗,同时满足服务质量约束。 |
|
算法/模型/方法名称 |
李雅普诺夫优化与在线凸优化(Lyapunov Optimization and Online Convex Optimization) |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 问题转换 |
|
理论基础和规律 |
1. 排队论 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
随机过程特征: |
|
时序和交互流程 |
每个时隙流程: |
综合比较与系统集成
这三个框架代表了分布式云操作系统中不同层次和不同时间尺度的数学方法:
-
分布式滑模控制(CSE-ROB-CTRL-0002):毫秒级控制,适用于机器人底层运动控制,强调鲁棒性和快速响应,处理匹配不确定性和干扰。
-
计算几何路径规划(CSE-ROB-CTRL-0003):秒级规划,适用于上层任务规划,强调安全性和最优性,处理高维非凸约束优化。
-
随机优化资源分配(MATH-COMP-OPT-0002):分钟级调度,适用于资源管理,强调随机性和长期最优,处理不确定工作负载。
系统集成架构
在实际分布式云操作系统中,这些方法可以集成如下:
┌─────────────────────────────────────────────────────────────┐
│ 应用层:任务规划与决策 │
│ CSE-ROB-CTRL-0003:计算几何路径规划 │
│ - 输入:任务目标、环境地图 │
│ - 输出:无碰撞路径、动作序列 │
└──────────────┬──────────────────────────────────────────────┘
│
┌──────────────▼──────────────────────────────────────────────┐
│ 控制层:运动控制与执行 │
│ CSE-ROB-CTRL-0002:分布式滑模控制 │
│ - 输入:期望轨迹、实际状态 │
│ - 输出:控制力矩/速度 │
└──────────────┬──────────────────────────────────────────────┘
│
┌──────────────▼──────────────────────────────────────────────┐
│ 资源层:计算与通信资源管理 │
│ MATH-COMP-OPT-0002:随机优化资源分配 │
│ - 输入:工作负载需求、资源状态 │
│ - 输出:资源分配方案 │
└─────────────────────────────────────────────────────────────┘时间尺度协调
-
路径规划层:运行频率1-10Hz,规划未来数秒到数分钟的轨迹
-
运动控制层:运行频率100-1000Hz,控制当前时刻的运动
-
资源管理层:运行频率0.1-1Hz,调整未来数分钟的资源分配
数学方法共性
-
优化理论贯穿始终:
-
路径规划:构型空间中的非凸优化
-
运动控制:李雅普诺夫函数优化
-
资源分配:随机优化
-
-
分布式算法结构:
-
都采用局部决策+邻居通信的模式
-
都考虑通信延迟和丢包的影响
-
都具备一定的容错能力
-
-
稳定性与收敛性分析:
-
都基于严格的数学证明
-
都有明确的性能保证边界
-
都考虑实际非理想条件的影响
-
未来发展方向
-
跨层联合优化:将路径规划、运动控制和资源分配联合优化,避免分层优化的次优性。
-
学习与优化结合:将强化学习与优化理论结合,处理模型不确定的环境。
-
异构系统集成:将不同动力学特性的智能体(无人机、地面机器人、机械臂)统一控制。
-
人机协同:将人类操作员纳入控制回路,实现共享控制。
这三个框架共同构成了分布式云操作系统中从底层控制到高层规划的完整数学方法体系,为实际系统的设计和实现提供了理论基础。
分布式云操作系统底层到高层数学方法与硬件结合综合框架
综合框架:分布式云操作系统的数学方法与硬件映射
系统层次结构与数学方法对应
|
系统层次 |
硬件组件 |
关键数学方法 |
数学特征 |
|---|---|---|---|
|
硬件层 |
CPU、GPU、内存、SSD、HBA、NIC、光模块 |
数值线性代数、计算几何、优化理论 |
有限域运算、矩阵分解、图优化 |
|
固件/驱动层 |
BIOS/UEFI、设备驱动 |
控制理论、信息论、编码理论 |
系统辨识、信道编码、纠错码 |
|
虚拟化层 |
虚拟化引擎、IOMMU |
博弈论、排队论、随机过程 |
资源分配、调度优化、马尔可夫决策 |
|
存储层 |
存储介质、RAID控制器 |
编码理论、信息论、图论 |
纠删码、再生码、分布式一致性 |
|
网络层 |
交换机、路由器、NIC |
图论、排队论、优化理论 |
网络流、路由算法、拥塞控制 |
|
计算层 |
计算单元、加速器 |
数值分析、并行计算、优化 |
并行算法、任务调度、负载均衡 |
|
调度层 |
调度器、资源管理器 |
运筹学、控制理论、博弈论 |
线性规划、动态规划、纳什均衡 |
|
应用层 |
应用软件、中间件 |
机器学习、信号处理、控制 |
深度学习、滤波理论、自适应控制 |
条目10:硬件级计算加速的数学方法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
计算机系统结构 / 硬件加速 / 数值计算 |
|
模型配方 |
问题:在异构计算架构(CPU+GPU+FPGA+ASIC)中,优化线性代数运算、卷积运算、注意力机制等核心计算模式,最大化硬件利用率,最小化能耗。 |
|
算法/模型/方法名称 |
张量计算优化与硬件感知调度 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 计算模式分析 |
|
理论基础和规律 |
1. 数值线性代数 |
|
应用场景和各类特征 |
应用场景: |
|
数学特征 |
代数特征: |
|
时序和交互流程 |
计算流水线: |
|
与硬件的结合 |
CPU微架构: |
条目11:存储系统的数学优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
存储系统与层次结构 / 编码理论 / 分布式存储 |
|
模型配方 |
问题:在分布式存储系统中,数据被分割存储在多个节点,节点可能失效。需要设计编码方案保证可靠性,同时优化存储效率、修复带宽、访问延迟。 |
|
算法/模型/方法名称 |
再生码与局部修复码优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 信息论下界 |
|
理论基础和规律 |
1. 有限域代数 |
|
与硬件的结合 |
SSD特性: |
条目12:网络系统的数学优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
计算机网络 / 性能分析 / 优化理论 |
|
模型配方 |
问题:数据中心网络CLOS拓扑中,优化流量调度,最小化最大链路利用率、端到端延迟、丢包率。考虑多路径路由、负载均衡、拥塞控制。 |
|
算法/模型/方法名称 |
多商品流优化与ECMP优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 流量工程 |
|
与硬件的结合 |
交换机ASIC: |
综合集成框架
硬件-数学方法映射矩阵
|
硬件组件 |
关键数学方法 |
优化目标 |
性能指标 |
|---|---|---|---|
|
CPU |
数值线性代数、调度理论 |
IPC提升、缓存命中率 |
CPI、分支误预测率 |
|
GPU |
并行计算、图算法 |
利用率、能效 |
SM占用率、内存带宽 |
|
内存 |
随机过程、排队论 |
延迟、带宽 |
访问延迟、行缓冲命中率 |
|
SSD |
编码理论、优化 |
耐久性、性能 |
写放大、QoS延迟 |
|
HBA卡 |
信息论、控制理论 |
IOPS、带宽 |
队列深度、延迟 |
|
NIC |
网络流理论、统计 |
吞吐量、延迟 |
丢包率、重传率 |
|
交换机 |
图论、排队论 |
吞吐量、公平性 |
缓冲区占用、链路利用率 |
|
光模块 |
信号处理、编码 |
误码率、距离 |
BER、OSNR |
跨层优化问题
问题1:数据局部性优化
-
数学方法:图划分、社区发现
-
硬件影响:NUMA架构、缓存层次
-
优化目标:最小化远程访问
问题2:能耗感知调度
-
数学方法:凸优化、动态规划
-
硬件影响:DVFS、功耗门控
-
优化目标:性能/功耗比最大化
问题3:可靠性建模
-
数学方法:随机过程、可靠性理论
-
硬件影响:MTTF、故障率
-
优化目标:系统可用性>99.99%
系统级数学模型
分布式云操作系统可建模为排队网络:
-
服务节点:M/G/1队列
-
网络链路:G/G/1队列
-
存储设备:带有服务变化的队列
系统响应时间:
R=∑i=1K2(1−ρi)λiE[Si2]+E[Si]
其中ρi=λiE[Si]为利用率。
硬件指令级优化
矩阵乘法在CPU上的优化:
# 基础实现
for i in range(M):
for j in range(N):
for k in range(K):
C[i,j] += A[i,k] * B[k,j]
# 优化后(分块+向量化)
for i0 in range(0, M, BI): # 分块
for j0 in range(0, N, BJ):
for k0 in range(0, K, BK):
# 内层循环向量化
for i in range(i0, min(i0+BI, M)):
for k in range(k0, min(k0+BK, K)):
a = A[i,k]
# SIMD向量化
for j in range(j0, min(j0+BJ, N), 8):
C[i,j:j+8] += a * B[k,j:j+8]GPU CUDA核函数优化:
__global__ void matmul(float* A, float* B, float* C, int M, int N, int K) {
int bx = blockIdx.x, by = blockIdx.y;
int tx = threadIdx.x, ty = threadIdx.y;
// 分块到共享内存
__shared__ float As[TILE][TILE];
__shared__ float Bs[TILE][TILE];
float sum = 0.0f;
for (int tile = 0; tile < K; tile += TILE) {
// 协作加载到共享内存
As[ty][tx] = A[(by*TILE+ty)*K + (tile+tx)];
Bs[ty][tx] = B[(tile+ty)*N + (bx*TILE+tx)];
__syncthreads();
// 计算分块
for (int k = 0; k < TILE; ++k) {
sum += As[ty][k] * Bs[k][tx];
}
__syncthreads();
}
// 写回结果
C[(by*TILE+ty)*N + (bx*TILE+tx)] = sum;
}实际部署考虑
-
热设计:基于热方程的散热优化
∂t∂T=α∇2T+ρcpq
-
电源完整性:基尔霍夫定律
∑Iin=∑Iout
-
信号完整性:传输线方程
∂x2∂2V=LC∂t2∂2V
-
时序收敛:静态时序分析
Tclk≥tprop+tsetup−tskew
这个综合框架展示了分布式云操作系统中从底层硬件到高层算法的完整数学方法体系,每个组件都有相应的数学优化方法,形成了一个完整的、可量化的设计优化流程。
分布式云操作系统数学方法的完整变种体系
完整的分布式云操作系统数学方法变种体系,涵盖从底层硬件到高层应用的所有层次,包括所有可能的算法变种、优化策略和硬件适配方案。
综合变种分类体系
1. 控制理论变种体系
|
控制类型 |
变种 |
数学核心 |
硬件适配 |
适用场景 |
|---|---|---|---|---|
|
PID控制 |
1. 经典PID |
u(t)=Kpe(t)+Ki∫e(t)dt+Kddtde |
微控制器、FPGA |
电机控制、温度控制 |
|
滑模控制 |
1. 一阶SMC |
s=0 |
ASIC加速 |
机器人、无人机 |
|
模型预测控制 |
1. 线性MPC |
minuJ(x,u) |
GPU并行求解QP |
过程控制、车辆控制 |
|
自适应控制 |
1. MRAC |
θ˙=−γφe |
在线参数辨识硬件 |
参数不确定系统 |
|
鲁棒控制 |
1. H∞控制 |
∥Tzw∥∞<γ |
DSP阵列 |
航空、航天 |
2. 优化算法变种体系
|
优化类型 |
变种 |
数学核心 |
硬件加速 |
收敛特性 |
|---|---|---|---|---|
|
梯度下降 |
1. 批量GD |
wt+1=wt−η∇f(wt) |
GPU矩阵运算 |
线性/次线性收敛 |
|
进化算法 |
1. 遗传算法 |
选择、交叉、变异 |
FPGA并行评估 |
全局搜索,慢收敛 |
|
元启发式 |
1. 禁忌搜索 |
邻域结构定义 |
启发式硬件 |
组合优化 |
|
凸优化 |
1. 内点法 |
KKT条件 |
线性代数加速器 |
多项式时间 |
|
非凸优化 |
1. 连续凸近似 |
凸松弛 |
混合整数求解器 |
指数复杂度 |
3. 机器学习算法变种体系
|
学习范式 |
变种 |
数学公式 |
硬件优化 |
应用领域 |
|---|---|---|---|---|
|
监督学习 |
1. 线性回归 |
minw∥Xw−y∥2 |
矩阵乘法加速 |
分类、回归 |
|
无监督学习 |
1. K-means |
minC∑i‖xi−μci‖2 |
距离计算硬件 |
聚类、降维、生成 |
|
强化学习 |
1. Q-learning |
Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)] |
经验回放内存 |
游戏、机器人 |
|
联邦学习 |
1. FedAvg |
w=∑k=1Knnkwk |
安全多方计算硬件 |
隐私保护学习 |
4. 网络算法变种体系
|
网络功能 |
变种 |
数学原理 |
硬件实现 |
性能指标 |
|---|---|---|---|---|
|
路由算法 |
1. 最短路径 |
Dijkstra: d[v]=min(d[v],d[u]+w(u,v)) |
TCAM查表 |
收敛时间、路由表大小 |
|
拥塞控制 |
1. Reno/CUBIC |
AIMD: cwnd←cwnd+1/cwnd |
NIC卸载 |
吞吐量、延迟、公平性 |
|
负载均衡 |
1. 轮询 |
哈希: h(key)modn |
可编程负载均衡器 |
负载均衡度、会话保持 |
|
流量调度 |
1. FIFO |
WFQ: Fi=max(Fi−1,Ai)+φiLi |
交换芯片队列管理 |
延迟、抖动、吞吐量 |
5. 存储算法变种体系
|
存储技术 |
变种 |
数学编码 |
硬件加速 |
可靠性指标 |
|---|---|---|---|---|
|
纠删码 |
1. Reed-Solomon |
RS: c=mG,G为生成矩阵 |
伽罗华域运算器 |
存储效率、修复带宽 |
|
RAID级别 |
1. RAID0 |
奇偶校验: P=D1⊕D2⊕...⊕Dn |
RAID控制器芯片 |
可用性、性能、容量 |
|
压缩算法 |
1. LZ77 |
Huffman: H=−∑pilog2pi |
压缩/解压ASIC |
压缩比、速度 |
|
去重算法 |
1. 定长分块 |
CDC: chunk=split(data,fingerprint) |
哈希计算硬件 |
去重率、I/O放大 |
6. 虚拟化与容器变种
|
虚拟化技术 |
变种 |
数学调度 |
硬件支持 |
性能隔离 |
|---|---|---|---|---|
|
CPU虚拟化 |
1. 全虚拟化 |
时间片调度 |
VT-x/AMD-V |
CPU份额、限额 |
|
内存虚拟化 |
1. 影子页表 |
页表映射 |
EPT/NPT |
内存访问延迟 |
|
IO虚拟化 |
1. 设备模拟 |
中断重映射 |
VT-d/AMD-Vi |
IOPS、带宽 |
|
网络虚拟化 |
1. VLAN |
隧道封装 |
SmartNIC |
网络延迟、吞吐 |
7. 安全算法变种体系
|
安全领域 |
变种 |
数学基础 |
硬件加速 |
安全等级 |
|---|---|---|---|---|
|
加密算法 |
1. AES |
AES: 轮函数R(x)=MC(SR(SB(x)))⊕ki |
AES-NI指令集 |
加密强度、性能 |
|
哈希算法 |
1. SHA-2 |
SHA-256: 消息扩展、压缩函数 |
SHA扩展指令 |
抗碰撞、抗原像 |
|
签名算法 |
1. RSA签名 |
ECDSA: s=k−1(z+rdA)modn |
椭圆曲线加速器 |
不可伪造性 |
|
零知识证明 |
1. zk-SNARK |
多项式承诺 |
零知识证明ASIC |
简洁性、非交互性 |
8. 分布式共识变种
|
共识类型 |
变种 |
数学保证 |
硬件要求 |
适用场景 |
|---|---|---|---|---|
|
BFT共识 |
1. PBFT |
三阶段提交 |
可信执行环境 |
联盟链、许可链 |
|
CFT共识 |
1. Paxos |
多数派提交 |
高可用服务器 |
分布式数据库 |
|
Nakamoto共识 |
1. PoW |
工作量证明: H(block)<target |
ASIC矿机 |
公有链、加密货币 |
|
混合共识 |
1. PoW+PoS |
结合多种机制 |
异构硬件 |
高吞吐链 |
9. 数值计算变种
|
计算类型 |
变种 |
数学方法 |
硬件加速 |
精度控制 |
|---|---|---|---|---|
|
线性代数 |
1. BLAS级别1-3 |
LU分解 |
矩阵乘法单元 |
条件数、向后误差 |
|
非线性求解 |
1. 牛顿法 |
xk+1=xk−Jf(xk)−1f(xk) |
非线性求解硬件 |
收敛速度、稳定性 |
|
数值积分 |
1. 梯形法 |
∫abf(x)dx≈nb−a∑i=1nf(xi) |
积分计算硬件 |
误差阶、计算量 |
|
微分方程 |
1. 欧拉法 |
RK4: k1=hf(tn,yn) |
微分方程求解器 |
稳定性、精度阶 |
10. 信号处理变种
|
信号处理 |
变种 |
数学变换 |
硬件加速 |
实时性 |
|---|---|---|---|---|
|
傅里叶分析 |
1. DFT |
FFT: Xk=∑n=0N−1xne−i2πkn/N |
FFT加速器 |
采样率、延迟 |
|
滤波算法 |
1. FIR滤波器 |
FIR: y[n]=∑k=0Mbkx[n−k] |
数字信号处理器 |
截止频率、阶数 |
|
压缩感知 |
1. 基追踪 |
min∥x∥1s.t. Φx=y |
稀疏恢复硬件 |
采样率、重构误差 |
|
调制解调 |
1. QAM |
OFDM: s(t)=∑k=0N−1Xkei2πfkt |
调制解调器芯片 |
误码率、频谱效率 |
硬件-算法联合优化框架
矩阵计算的全栈优化示例
问题: 计算C=AB,其中A∈RM×K,B∈RK×N,C∈RM×N
优化层次:
-
算法层:
-
选择计算顺序: (AB)C vs A(BC)
-
分块尺寸优化
-
精度选择: FP64/FP32/FP16/BF16/INT8
-
-
软件层:
-
循环展开
-
向量化
-
缓存预取
-
多线程并行
-
-
运行时层:
-
动态调度
-
负载均衡
-
能耗感知调度
-
-
硬件指令层:
-
SIMD指令: AVX-512, NEON
-
矩阵扩展: AMX, Tensor Core
-
内存操作: 非临时存储, 流式存储
-
-
微架构层:
-
指令流水线优化
-
分支预测
-
缓存层次管理
-
-
电路层:
-
时钟门控
-
电压/频率调节
-
近似计算
-
数学优化模型:
mint,b,pT=f(M,N,K,t,b,p)
s.t.
-
缓存约束: b2≤Scache/3
-
寄存器约束: t≤R
-
功耗约束: P≤Pmax
-
精度约束: ε≤εmax
其中t为分块大小,b为缓存块大小,p为并行度。
存储系统的全栈优化示例
问题: 实现高效的键值存储
优化层次:
-
数据结构层:
-
B+树 vs LSM树 vs 哈希表
-
布隆过滤器 vs 布谷鸟过滤器
-
跳表 vs 平衡树
-
-
算法层:
-
压缩算法: LZ4 vs Zstd vs Snappy
-
缓存替换: LRU vs LFU vs ARC
-
合并策略: Leveled vs Tiered
-
-
系统层:
-
日志结构合并树
-
写放大优化
-
读放大优化
-
-
硬件层:
-
SSD FTL优化
-
持久内存编程
-
存储类内存使用
-
数学模型:
写放大: WA=有效写入量实际写入量
读放大: RA=有效读取量实际读取量
空间放大: SA=有效数据量占用空间
优化目标: minαWA+βRA+γSA
新兴交叉方向
量子-经典混合算法
-
变分量子算法:
-
变分量子本征求解器(VQE)
-
量子近似优化算法(QAOA)
-
量子神经网络(QNN)
-
-
量子机器学习:
-
量子支持向量机
-
量子主成分分析
-
量子生成对抗网络
-
-
量子优化:
-
量子线性系统求解
-
量子半定规划
-
量子内点法
-
数学基础: 量子力学、线性代数、优化理论
硬件需求: 量子处理器、经典-量子接口、低温系统
神经符号计算
-
神经定理证明:
-
图神经网络+自动推理
-
强化学习+逻辑编程
-
可微逻辑推理
-
-
符号回归:
-
遗传编程+神经网络
-
可微符号搜索
-
方程发现
-
-
知识图谱推理:
-
图神经网络+规则推理
-
知识图谱补全
-
复杂查询回答
-
数学基础: 逻辑、图论、概率、深度学习
硬件优化: 图计算加速器、规则引擎
生物启发计算
-
神经形态计算:
-
脉冲神经网络
-
忆阻器交叉阵列
-
事件驱动计算
-
-
DNA计算:
-
DNA存储编码
-
分子计算
-
生化反应网络
-
-
群体智能:
-
蚁群优化硬件
-
粒子群硬件实现
-
蜂群算法加速
-
数学基础: 动力系统、随机过程、信息论
硬件实现: 神经形态芯片、分子计算设备
系统级综合优化
性能-功耗-面积(PPA)联合优化
优化问题:
minx[T(x),E(x),A(x)]
s.t.
fi(x)≤0,i=1,...,m
gj(x)=0,j=1,...,p
其中x为设计参数向量,T为性能,E为功耗,A为面积。
帕累托前沿: P={x∈X:¬∃y∈X,y≺x}
求解方法:
-
加权和法: min∑wifi(x)
-
ε约束法: minf1(x)s.t. fi(x)≤εi
-
进化多目标优化: NSGA-II, MOEA/D
可靠性-可用性-可服务性(RAS)建模
可用性模型:
A=MTTF+MTTRMTTF
其中MTTF为平均无故障时间,MTTR为平均修复时间。
马尔可夫链模型:
状态转移矩阵P,稳态分布π满足πP=π。
冗余优化:
Rsystem=1−∏i=1n(1−Ri)ki
其中ki为组件i的冗余数。
安全-隐私-可信联合设计
差分隐私:
算法M满足(ε,δ)-差分隐私,如果对任意相邻数据集D,D′和任意输出S:
Pr[M(D)∈S]≤eεPr[M(D′)∈S]+δ
可信计算:
远程证明: verify(quote,nonce)→true,false
同态加密:
E(m1)⊗E(m2)=E(m1⊕m2)
E(m)k=E(k⋅m)
总结
这个完整的分布式云操作系统数学方法变种体系涵盖了从底层硬件到高层应用的所有方面,包括:
-
300+个具体算法变种,每个都有明确的数学描述
-
10个主要技术领域的控制、优化、学习、网络、存储、虚拟化、安全、共识、计算、信号处理
-
硬件-算法协同优化的全栈框架
-
新兴交叉方向的量子计算、神经符号计算、生物启发计算
-
系统级综合优化的PPA、RAS、安全隐私一体化设计
这个体系为分布式云操作系统的设计、实现和优化提供了完整的数学工具集,可以根据具体的应用需求、硬件约束和性能目标,选择合适的算法变种并进行联合优化。
分布式云操作系统完整数学方法体系与硬件协同设计
目录
-
分布式系统基础理论
-
计算资源管理算法
-
存储系统算法
-
网络通信算法
-
虚拟化与容器技术
-
安全与隐私保护
-
能效与热管理
-
故障容错与可靠性
-
调度与编排算法
-
异构硬件协同计算
-
稀土行业特定优化
-
系统全栈优化框架
1. 分布式系统基础理论
1.1 分布式一致性算法体系
|
算法类别 |
变种 |
数学基础 |
收敛条件 |
硬件要求 |
|---|---|---|---|---|
|
拜占庭容错 |
PBFT |
门限签名 |
n≥3f+1 |
可信执行环境 |
|
非拜占庭容错 |
Paxos |
状态机复制 |
多数派提交 |
稳定存储 |
|
最终一致性 |
CRDT |
格理论 |
可交换操作 |
向量时钟硬件 |
|
分区一致性 |
PACELC |
网络分区模型 |
分区恢复条件 |
时钟同步硬件 |
数学基础:
拜占庭将军问题形式化:
-
设n个节点,f个恶意节点
-
可解条件:n>3f
-
算法复杂度:O(n2)消息
状态机复制形式化:
-
每个节点维护状态S和操作日志L
-
操作op满足:Si+1=apply(Si,op)
-
安全性:∀i,j:Li=Lj→Si=Sj
-
活性:∀op:∃t,∀i>t:op∈Li
CRDT数学基础:
-
可交换:apply(apply(s,a),b)=apply(apply(s,b),a)
-
结合:apply(apply(s,a),b)=apply(s,combine(a,b))
-
幂等:apply(apply(s,a),a)=apply(s,a)
1.2 分布式事务算法
|
事务模型 |
变种 |
一致性保证 |
数学表示 |
硬件加速 |
|---|---|---|---|---|
|
2PC/3PC |
经典2PC |
原子提交 |
Prepare/Commit |
事务加速器 |
|
Saga |
补偿Saga |
最终一致性 |
T1→T2→...→Ck→...→C1 |
补偿日志 |
|
TCC |
Try-Confirm |
业务补偿 |
Try→Confirm/Cancel |
资源预留 |
|
优化事务 |
乐观并发 |
隔离级别 |
TSO,Snapshot |
时间戳硬件 |
数学形式化:
2PC协议:
-
阶段1:协调者发送prepare,参与者回复yes/no
-
阶段2:如果所有yes,发送commit,否则abort
-
阻塞条件:协调者故障
Saga补偿:
-
事务序列:T1,T2,...,Tn
-
补偿序列:Cn,Cn−1,...,C1
-
确保:apply(apply(S,Ti),Ci)=S
并发控制:
-
可串行化条件:H≃S
-
冲突可串行化:SG(H)无环
-
视图可串行化:存在等价视图
1.3 分布式时钟同步
|
同步方法 |
变种 |
精度 |
数学原理 |
硬件支持 |
|---|---|---|---|---|
|
NTP |
NTPv4 |
毫秒级 |
时间偏差估计 |
网络时间协议 |
|
PTP |
IEEE1588 |
纳秒级 |
主从同步 |
时间戳硬件 |
|
时钟共识 |
Cristian |
微秒级 |
时钟读数平均 |
稳定时钟源 |
|
逻辑时钟 |
Lamport |
偏序关系 |
事件排序 |
逻辑时钟硬件 |
数学建模:
时钟偏差模型:
-
本地时钟:C(t)=αt+β
-
偏差:offset=tremote−tlocal
-
延迟:delay=(t4−t1)−(t3−t2)
-
滤波:offset′=Kalman(offset,σ2)
时钟同步协议:
-
对称模式:offset=2(t2−t1)+(t3−t4)
-
延迟补偿:delay=(t4−t1)−(t3−t2)
-
精度边界:error≤2delay
逻辑时钟:
-
Lamport:C(e)=max(C(e),C(msg))+1
-
向量时钟:VCi[j]=max(VCi[j],VCmsg[j])
-
偏序关系:e→f⇔VC(e)<VC(f)
2. 计算资源管理算法
2.1 调度算法体系
|
调度策略 |
变种 |
目标函数 |
数学优化 |
硬件感知 |
|---|---|---|---|---|
|
批处理调度 |
FIFO |
平均周转时间 |
min n1∑(Ci−Ai) |
批处理队列 |
|
实时调度 |
RM |
截止时间满足 |
U=∑TiCi≤n(21/n−1) |
实时时钟 |
|
多处理器调度 |
全局调度 |
负载均衡 |
min max(Li) |
NUMA感知 |
|
云调度 |
装箱算法 |
资源利用率 |
bin packing |
资源监控 |
数学优化模型:
批处理调度优化:
-
目标:min n1∑i=1n(Ci−Ai)
-
约束:∑jRij≤Cj
-
其中Ci完成时间,Ai到达时间
实时调度可调度性:
-
RM调度:U=∑i=1nTiCi≤n(21/n−1)
-
EDF调度:U=∑i=1nTiCi≤1
-
其中Ci最坏执行时间,Ti周期
装箱问题:
-
决策变量:xij∈{0,1}
-
目标:min ∑j=1myj
-
约束:∑i=1nwixij≤Cyj, ∑j=1mxij=1
-
其中yj表示箱子j是否使用
2.2 负载均衡算法
|
均衡策略 |
变种 |
决策依据 |
数学分析 |
硬件实现 |
|---|---|---|---|---|
|
静态均衡 |
轮询 |
预定义规则 |
均匀分布 |
硬件查表 |
|
动态均衡 |
最少连接 |
实时指标 |
排队论分析 |
计数器阵列 |
|
自适应均衡 |
强化学习 |
环境反馈 |
Q-learning |
自适应逻辑 |
|
全局均衡 |
集中式 |
全局视图 |
共识算法 |
全局状态同步 |
排队论模型:
M/M/c队列:
-
到达率:λ
-
服务率:μ
-
服务器数:c
-
利用率:ρ=cμλ
-
平均队列长度:Lq=c!(1−ρ)2ρc+1P0
-
平均等待时间:Wq=λLq
负载均衡优化:
-
目标:min max(Li)
-
约束:∑i=1nλi=Λ
-
解:λi=nΛ(均匀分布)
强化学习负载均衡:
-
状态:s=(L1,L2,...,Ln)
-
动作:a=选择服务器
-
奖励:r=−max(Li)
-
Q值更新:Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)]
2.3 资源预留与分配
|
预留策略 |
变种 |
分配粒度 |
数学模型 |
硬件支持 |
|---|---|---|---|---|
|
静态预留 |
固定配额 |
资源隔离 |
线性规划 |
资源分区 |
|
动态预留 |
弹性预留 |
按需调整 |
时间序列预测 |
动态重配置 |
|
共享预留 |
超额订阅 |
利用率提升 |
概率保证 |
突发缓冲 |
|
联合预留 |
多维资源 |
协调分配 |
多维装箱 |
多维调度 |
优化模型:
资源分配优化:
-
目标:max ∑i=1nUi(ri)
-
约束:∑i=1nrij≤Rj, ∀j
-
其中Ui效用函数,ri资源分配
拍卖机制:
-
投标:bi=(qi,pi)
-
分配规则:xi=1 if pi≥preserve
-
支付规则:payi=max(preserve,maxj=ipj)
-
性质:个体理性、激励相容
预留预测:
-
时间序列:rt=f(rt−1,rt−2,...,rt−p)+εt
-
ARIMA模型:(1−∑i=1pφiLi)(1−L)drt=(1+∑i=1qθiLi)εt
-
预测误差:MSE=T1∑t=1T(rt−r^t)2
3. 存储系统算法
3.1 分布式文件系统
|
文件系统 |
架构 |
一致性模型 |
数学保证 |
硬件优化 |
|---|---|---|---|---|
|
GFS/HDFS |
主从架构 |
最终一致性 |
副本放置 |
专用存储节点 |
|
Ceph |
CRUSH算法 |
强一致性 |
一致性哈希 |
OSD优化 |
|
GlusterFS |
无中心架构 |
元数据分布 |
哈希分布 |
用户态实现 |
|
Lustre |
并行文件系统 |
POSIX语义 |
条带化算法 |
高性能网络 |
数据分布算法:
CRUSH算法:
-
输入:PG,OSD map,rules
-
输出:OSD set
-
过程:hash(PG)→bucket selection→OSD
-
特性:确定性、均匀性、故障域感知
一致性哈希:
-
哈希空间:[0,2m−1]
-
虚拟节点:v nodes per physical
-
数据映射:data→hash(key)→clockwise node
-
添加/删除影响:O(K/N)数据迁移
条带化算法:
-
条带大小:s
-
条带宽度:w
-
数据块i位置:server=(i/s) mod w, offset=(i/s)/w×s+i mod s
-
并行度:min(w,并发数)
3.2 缓存算法体系
|
缓存策略 |
变种 |
替换算法 |
数学分析 |
硬件实现 |
|---|---|---|---|---|
|
LRU |
标准LRU |
最近最少使用 |
栈模型 |
硬件队列 |
|
LFU |
标准LFU |
最不经常使用 |
计数模型 |
计数器阵列 |
|
自适应 |
LIRS |
访问模式感知 |
概率模型 |
自适应逻辑 |
|
应用感知 |
内容感知 |
内容特征 |
效用函数 |
内容分析硬件 |
数学分析:
LRU栈模型:
-
栈距离:d表示访问间隔
-
命中率:h=∑d=1Cpd
-
其中pd是栈距离d的概率
-
Belady最优:替换最远将来访问
竞争比分析:
-
确定性算法下界:k(缓存大小)
-
随机算法下界:Hk≈lnk
-
LRU竞争比:k
-
标记算法竞争比:2Hk
缓存效用优化:
-
目标:max ∑i=1nUi×hiti−C×size
-
约束:∑i=1nsizei≤capacity
-
其中Ui是项目i的效用,hiti是命中率
3.3 纠删码与数据保护
|
编码类型 |
变种 |
参数 |
数学构造 |
硬件加速 |
|---|---|---|---|---|
|
RS码 |
经典RS |
(n,k) |
生成矩阵G |
伽罗华域乘法器 |
|
LDPC码 |
规则LDPC |
校验矩阵稀疏 |
迭代译码 |
并行译码器 |
|
再生码 |
MSR |
修复带宽优化 |
乘积矩阵 |
修复计算加速 |
|
局部修复码 |
金字塔码 |
修复局部性l |
校验结构设计 |
局部计算 |
编码数学:
RS码构造:
-
信息多项式:m(x)=m0+m1x+...+mk−1xk−1
-
编码多项式:c(x)=m(x)g(x)
-
生成多项式:g(x)=∏i=1n−k(x−αi)
-
译码:Berlekamp-Massey、Forney算法
LDPC码:
-
校验矩阵H:稀疏m×n二元矩阵
-
码字c:HcT=0
-
Tanner图:变量节点+校验节点
-
置信传播:L(qij)=2tanh−1(∏i′∈N(j)∖itanh(2L(ri′j)))
再生码存储-带宽折衷:
-
存储:α
-
修复带宽:γ=dβ
-
折衷曲线:(α,γ)满足B≤∑i=0k−1min(α,(d−i)β)
-
MSR点:α=B/k, γ=Bd/k(d−k+1)
-
MBR点:α=γ=2Bd/(2kd−k(k−1))
4. 网络通信算法
4.1 拥塞控制算法
|
控制算法 |
变种 |
拥塞信号 |
数学模型 |
硬件卸载 |
|---|---|---|---|---|
|
基于丢失 |
Reno |
丢包 |
AIMD模型 |
丢包检测 |
|
基于延迟 |
Vegas |
单向延迟 |
延迟梯度 |
时间戳处理 |
|
基于ECN |
DCTCP |
显式拥塞通知 |
比例控制 |
ECN标记 |
|
混合方法 |
Compound |
丢包+延迟 |
混合模型 |
多信号处理 |
数学建模:
AIMD模型:
-
加性增加:cwnd←cwnd+1/cwnd
-
乘性减少:cwnd←cwnd/2
-
平均窗口:W=3p8
-
平均吞吐:T=RTT12p3
BBR模型:
-
瓶颈带宽:BtlBw=max(deliveryRate)
-
传播延迟:RTprop=min(RTT)
-
发送速率:rate=gain×BtlBw
-
排队控制:inflight=2×BDP
DCTCP控制律:
-
标记概率:p=(queueLength−K)/(Kmax−K)
-
窗口调整:cwnd←cwnd×(1−α/2)
-
其中α是ECN标记比例估计
4.2 路由算法体系
|
路由协议 |
类型 |
度量 |
算法核心 |
硬件加速 |
|---|---|---|---|---|
|
距离向量 |
RIP |
跳数 |
Bellman-Ford |
距离表更新 |
|
链路状态 |
OSPF |
代价 |
Dijkstra |
SPF计算 |
|
路径向量 |
BGP |
AS路径 |
路径选择 |
路由表查找 |
|
软件定义 |
OpenFlow |
流表匹配 |
集中控制 |
可编程流水线 |
最短路径算法:
Dijkstra算法:
-
初始化:d[s]=0, d[v]=∞, ∀v=s
-
循环:选取u使d[u]最小,标记u
-
松弛:∀(u,v)∈E, d[v]=min(d[v],d[u]+w(u,v))
-
复杂度:O(∣E∣+∣V∣log∣V∣)
Bellman-Ford:
-
初始化:d[s]=0, d[v]=∞
-
松弛∣V∣−1次:d[v]=min(d[v],d[u]+w(u,v))
-
检测负环:如果还能松弛则存在负环
-
复杂度:O(∣V∣∣E∣)
约束最短路径:
-
目标:min ∑wexe
-
约束:∑xe−∑xe=⎩⎨⎧1−10v=sv=telse
-
额外约束:∑cexe≤C
4.3 流量工程与负载均衡
|
流量工程 |
方法 |
优化目标 |
数学模型 |
硬件实现 |
|---|---|---|---|---|
|
ECMP |
哈希ECMP |
负载均衡 |
流哈希 |
哈希计算 |
|
全局优化 |
线性规划 |
最小最大利用率 |
多商品流问题 |
集中式优化器 |
|
在线调整 |
强化学习 |
动态适应 |
在线决策 |
在线学习硬件 |
|
SDN优化 |
集中控制 |
路径编程 |
流表优化 |
可编程交换机 |
多商品流问题:
线性规划形式:
-
决策变量:fpd为需求d在路径p上的流量
-
目标:min ρ(最大链路利用率)
-
约束:
-
∑pfpd=demandd, ∀d
-
∑d∑p:e∈pfpd≤ρ⋅ce, ∀e
-
fpd≥0
-
对偶分解:
-
原问题:min ρ
-
对偶变量:λe≥0(链路价格)
-
对偶问题:max ∑dud(λ)−∑eλece
-
其中ud(λ)=minp∑e∈pλe
ECMP哈希:
-
哈希函数:h(flow_key)→[0,N−1]
-
路径选择:path=h(flow_key) mod k
-
流保持:相同流始终选择相同路径
-
负载均衡:均匀哈希函数
5. 虚拟化与容器技术
5.1 CPU虚拟化算法
|
虚拟化技术 |
实现方式 |
性能优化 |
数学模型 |
硬件支持 |
|---|---|---|---|---|
|
全虚拟化 |
二进制翻译 |
陷入模拟 |
指令模拟 |
VT-x/AMD-V |
|
硬件辅助 |
根模式/非根 |
直接执行 |
模式切换开销 |
二级地址转换 |
|
容器虚拟化 |
命名空间 |
轻量级隔离 |
资源限制模型 |
命名空间硬件支持 |
|
卸载虚拟化 |
SR-IOV |
设备共享 |
设备分区 |
IOMMU |
性能模型:
虚拟化开销:
-
模式切换:tvmexit+tvmentry
-
地址转换:EPT walk overhead
-
I/O虚拟化:exit frequency×exit cost
-
总开销:overhead=∑freqi×costi
资源隔离:
-
CPU份额:sharei=∑weightjweighti×capacity
-
内存限制:limiti硬限制,softi软限制
-
I/O限制:bpsi, iopsi限制
-
违反检测:usagei>limiti→throttle
容器密度优化:
-
目标:max ∑Ui
-
约束:∑Rij≤Cj, ∀j
-
其中Rij是容器i对资源j的需求
-
装箱问题:多维资源约束
5.2 内存虚拟化算法
|
内存技术 |
机制 |
优化策略 |
数学分析 |
硬件支持 |
|---|---|---|---|---|
|
影子页表 |
客户页表 |
写时复制 |
缺页异常率 |
EPT/NPT |
|
大页支持 |
透明大页 |
减少TLB缺失 |
TLB覆盖率 |
大页硬件支持 |
|
内存气球 |
气球驱动 |
动态调整 |
回收效率 |
气球驱动硬件辅助 |
|
内存去重 |
内容哈希 |
内存节省 |
去重率 |
内存哈希硬件 |
内存管理模型:
缺页异常模型:
-
缺页率:f=1−H, H是命中率
-
有效访问时间:EAT=H×tmem+(1−H)×(tpf+tmem)
-
其中tpf是缺页处理时间
内存去重:
-
页面哈希:h=hash(page_content)
-
重复检测:hi=hj
-
合并条件:contenti=contentj
-
节省空间:savings=∑i=1k(ci−1)×page_size
透明大页:
-
大页大小:2MB或1GB
-
分配策略:if contiguity≥threshold then use hugepage
-
性能提升:perf_gain=f(减少TLB缺失率)
5.3 I/O虚拟化算法
|
I/O虚拟化 |
技术 |
性能优化 |
数学模型 |
硬件卸载 |
|---|---|---|---|---|
|
设备模拟 |
QEMU |
事件通知 |
中断开销 |
VirtIO硬件 |
|
直通技术 |
PCIe直通 |
零拷贝 |
DMA重映射 |
IOMMU |
|
半虚拟化 |
VirtIO |
共享内存 |
零拷贝传输 |
轮询模式驱动 |
|
智能网卡 |
可编程NIC |
协议处理 |
卸载决策 |
SmartNIC |
性能分析:
设备模拟开销:
-
陷入次数:nexit=nio×exit_ratio
-
每次陷入:costexit
-
总开销:overhead=nexit×costexit
直通性能:
-
延迟:latencypassthru≈latencynative
-
吞吐:throughputpassthru≈throughputnative
-
约束:每个VF只能分配给一个VM
VirtIO优化:
-
环缓冲区:desc,used,avail环
-
批处理:batch size=k
-
通知抑制:notification suppression
-
性能:throughput=f(batch_size,notification_cost)
6. 安全与隐私保护
6.1 加密算法体系
|
加密类型 |
算法 |
安全强度 |
数学基础 |
硬件加速 |
|---|---|---|---|---|
|
对称加密 |
AES |
128/192/256位 |
代换-置换网络 |
AES-NI |
|
非对称加密 |
RSA |
1024/2048/3072位 |
大数分解 |
模乘加速器 |
|
哈希函数 |
SHA-2 |
256/512位 |
海绵结构 |
SHA扩展指令 |
|
后量子密码 |
格密码 |
抗量子攻击 |
格困难问题 |
后量子密码硬件 |
加密算法数学:
AES轮函数:
-
SubBytes: S(ai,j)
-
ShiftRows: 行移位
-
MixColumns: 列混合c(x)=(03)x3+(01)x2+(01)x+(02)
-
AddRoundKey: ⊕k
RSA算法:
-
密钥生成:选择p,q, n=pq, φ=(p−1)(q−1), 选择e, 计算d=e−1 mod φ
-
加密:c=me mod n
-
解密:m=cd mod n
椭圆曲线加密:
-
曲线:y2=x3+ax+b mod p
-
点加:P+Q=R
-
标量乘:kP=P+P+...+P(k次)
-
困难问题:ECDLP
6.2 访问控制算法
|
访问模型 |
机制 |
策略语言 |
形式化验证 |
硬件实现 |
|---|---|---|---|---|
|
自主访问 |
ACL |
主体-对象权限 |
访问控制矩阵 |
权限检查硬件 |
|
强制访问 |
Bell-LaPadula |
安全级别 |
信息流控制 |
安全标签硬件 |
|
基于角色 |
RBAC |
角色-权限分配 |
角色工程 |
角色查找硬件 |
|
基于属性 |
ABAC |
属性谓词 |
策略评估 |
属性匹配硬件 |
形式化模型:
Bell-LaPadula模型:
-
简单安全属性:subject S can read object O only if L(S)≥L(O)
-
*-属性:S can write O only if L(S)≤L(O)
-
自主安全:访问矩阵检查
RBAC模型:
-
用户分配:UA⊆U×R
-
权限分配:PA⊆P×R
-
角色层次:RH⊆R×R(偏序)
-
约束:∀(r1,r2)∈RH,if (u,r1)∈UA and (p,r2)∈PA then (u,p)允许
ABAC模型:
-
属性:A={a1,a2,...,an}
-
策略:policy:condition(A)→decision
-
条件:∧,∨,¬,=,∈,≤等组合
-
评估:eval(policy,context)→permit/deny
6.3 隐私保护算法
|
隐私技术 |
方法 |
隐私保证 |
数学模型 |
硬件支持 |
|---|---|---|---|---|
|
差分隐私 |
Laplace机制 |
(ε,δ)-DP |
敏感度分析 |
噪声生成硬件 |
|
安全多方 |
秘密共享 |
信息论安全 |
秘密分割 |
MPC加速器 |
|
联邦学习 |
模型平均 |
本地差分隐私 |
梯度下降 |
安全聚合硬件 |
|
可信执行 |
SGX |
内存加密 |
证明协议 |
安全飞地 |
差分隐私数学:
拉普拉斯机制:
-
敏感度:Δf=maxD,D′∥f(D)−f(D′)∥1
-
拉普拉斯分布:Lap(0,εΔf)
-
算法:M(D)=f(D)+Lap(εΔf)
-
满足:ε-差分隐私
组合定理:
-
顺序组合:k个εi-DP算法组合为(∑εi)-DP
-
并行组合:不相交数据集上k个ε-DP算法组合为ε-DP
-
高级组合:k个(ε,δ)-DP算法组合为(ε′,kδ+δ′)-DP
安全多方计算:
-
秘密共享:s=s1⊕s2⊕...⊕sn
-
门计算:AND(a,b)=a⋅b, XOR(a,b)=a⊕b
-
电路评估:C(x)=eval(gates,shares)
-
安全性:模拟器存在
7. 能效与热管理
7.1 功耗管理算法
|
功耗管理 |
技术 |
控制粒度 |
数学模型 |
硬件支持 |
|---|---|---|---|---|
|
DVFS |
电压频率调节 |
核心级 |
功耗模型 |
电压调节器 |
|
时钟门控 |
细粒度门控 |
逻辑门级 |
活动因子 |
时钟门控单元 |
|
电源门控 |
休眠状态 |
模块级 |
漏电功耗 |
电源开关 |
|
异构调度 |
大小核调度 |
任务感知 |
能效模型 |
异构核心 |
功耗模型:
动态功耗:Pdynamic=αCV2f
静态功耗:Pstatic=VIleakage
总功耗:P=Pdynamic+Pstatic
DVFS优化:
-
性能约束:t≤tdeadline
-
功耗最小:min P(V,f)
-
关系:f∝V, t∝1/f
-
最优工作点:(V∗,f∗)
能效调度:
-
能效:EE=powerperformance
-
目标:max EE
-
约束:∑ti≤deadline, ∑Pi≤budget
-
解:负载分配与频率选择
7.2 热管理算法
|
热管理 |
策略 |
控制目标 |
数学模型 |
硬件实现 |
|---|---|---|---|---|
|
DVFS调温 |
温度感知DVFS |
温度上限 |
热传导方程 |
温度传感器 |
|
任务调度 |
热感知调度 |
温度分布 |
热模型预测 |
温度监测 |
|
冷却控制 |
风扇调速 |
冷却效率 |
热交换方程 |
风扇控制器 |
|
动态调整 |
功耗封顶 |
温度保护 |
热容模型 |
节流电路 |
热模型:
热传导方程:∂t∂T=α∇2T+ρcpq
其中α热扩散率,q热源功率,ρ密度,cp比热容
热阻网络:
-
热阻:Rth=PΔT
-
热容:Cth=mcp
-
RC网络:CdtdT+RT−Tamb=P
-
解:T(t)=Tamb+PR(1−e−t/RC)
热感知调度:
-
目标:min max(Ti)
-
约束:∑Pi≤Pmax, Ti≤Tmax
-
解:任务分配与频率调节
7.3 能源采集与优化
|
能源管理 |
技术 |
优化目标 |
数学模型 |
硬件系统 |
|---|---|---|---|---|
|
能源采集 |
太阳能 |
最大功率跟踪 |
采集模型 |
能量采集器 |
|
能量存储 |
电池管理 |
寿命优化 |
电池模型 |
电池管理芯片 |
|
能量分配 |
动态分配 |
效用最大化 |
优化分配 |
能量路由器 |
|
能量感知 |
能量预测 |
能量中立 |
预测模型 |
能量监测 |
能量管理模型:
能量采集:
-
采集功率:Pharvest(t)
-
存储能量:E(t)=∫0t(Pharvest(τ)−Pload(τ))dτ
-
约束:0≤E(t)≤Emax
能量优化:
-
目标:max ∫0TU(Pload(t))dt
-
约束:E(t)≥0, ∀t
-
其中U是效用函数
电池寿命:
-
循环寿命:L=f(DOD,rate,temp)
-
老化模型:capacity(t)=capacity0×e−αt
-
优化:min aging rate
8. 故障容错与可靠性
8.1 故障检测算法
|
检测方法 |
技术 |
检测指标 |
数学模型 |
硬件实现 |
|---|---|---|---|---|
|
心跳检测 |
周期心跳 |
超时检测 |
超时分布 |
定时器硬件 |
|
ping检测 |
ICMP ping |
可达性 |
丢包率 |
网络接口 |
|
健康检查 |
应用健康 |
状态检查 |
健康评分 |
健康检查硬件 |
|
异常检测 |
统计分析 |
偏离检测 |
统计模型 |
异常检测硬件 |
故障检测模型:
心跳超时:
-
心跳间隔:Theartbeat
-
超时时间:Ttimeout=k×Theartbeat
-
检测时间:Tdetect≤Ttimeout
-
误报率:Pfalse=P(延迟>Ttimeout)
异常检测:
-
特征:x=(x1,x2,...,xd)
-
正常模型:p(x∥normal)
-
异常得分:score(x)=−log p(x∥normal)
-
阈值:if score(x)>threshold then anomaly
故障传播:
-
传播图:G=(V,E)
-
传播概率:pij
-
影响范围:R=(I−P)−1×f
-
其中f是初始故障向量
8.2 故障恢复算法
|
恢复策略 |
技术 |
恢复目标 |
数学模型 |
硬件支持 |
|---|---|---|---|---|
|
检查点 |
协同检查点 |
恢复点目标 |
检查点开销 |
检查点硬件 |
|
复制恢复 |
主备切换 |
高可用性 |
切换时间 |
复制硬件 |
|
回滚恢复 |
消息日志 |
确定性重放 |
日志开销 |
日志硬件 |
|
自适应恢复 |
分级恢复 |
服务质量 |
恢复策略选择 |
自适应控制 |
检查点优化:
检查点间隔:
-
开销:C(检查点时间)
-
故障间隔:MTBF
-
最优间隔:Topt=2C×MTBF
-
期望丢失工作:E[loss]=2T+TC×MTBF
主备切换:
-
检测时间:Tdetect
-
切换时间:Tswitch
-
恢复时间:Trecovery=Tdetect+Tswitch
-
可用性:A=MTBF+TrecoveryMTBF
日志恢复:
-
日志大小:L
-
重放时间:Treplay=αL
-
恢复点:RPO=L/rate
-
恢复时间:RTO=Treplay
8.3 可靠性建模
|
可靠性模型 |
方法 |
评估指标 |
数学模型 |
硬件分析 |
|---|---|---|---|---|
|
马尔可夫链 |
连续时间 |
可用性 |
状态转移率 |
组件故障率 |
|
故障树 |
静态故障树 |
系统可靠性 |
逻辑门分析 |
组件依赖 |
|
可靠性块 |
串联系统 |
系统可靠度 |
可靠度乘积 |
冗余配置 |
|
加速寿命 |
阿伦尼斯模型 |
加速因子 |
应力-寿命关系 |
加速测试硬件 |
可靠性计算:
串联系统:
-
可靠度:Rs=∏i=1nRi
-
失效率:λs=∑i=1nλi
-
MTTF:MTTFs=λs1
并联系统:
-
可靠度:Rs=1−∏i=1n(1−Ri)
-
对于n中取k:Rs=∑i=kn(in)Ri(1−R)n−i
马尔可夫模型:
-
状态转移矩阵:Q
-
稳态概率:πQ=0, ∑πi=1
-
可用性:A=∑i∈upπi
-
可靠性:R(t)=π(0)eQt1up
9. 调度与编排算法
9.1 容器编排算法
|
编排功能 |
算法 |
优化目标 |
数学模型 |
实现技术 |
|---|---|---|---|---|
|
调度算法 |
最佳适应 |
资源利用率 |
装箱问题 |
Kubernetes调度器 |
|
扩缩算法 |
水平扩缩 |
负载均衡 |
阈值检测 |
HPA |
|
滚动更新 |
蓝绿部署 |
零停机 |
版本管理 |
部署策略 |
|
服务网格 |
流量管理 |
服务治理 |
路由规则 |
Istio |
容器调度优化:
多维资源调度:
-
资源需求:ri=(cpui,memi,storagei,...)
-
节点容量:Cj=(cpuj,memj,storagej,...)
-
约束:∑i∈nodejri≤Cj
-
目标:min ∑jUj(节点利用率)
自动扩缩:
-
指标:metric(t)(CPU、内存、QPS等)
-
阈值:threshold
-
决策:if metric(t)>threshold then scale_out
-
预测扩缩:scale=f(metric(t),trend,seasonality)
滚动更新:
-
批次大小:batch_size
-
最大不可用:maxUnavailable
-
最大激增:maxSurge
-
更新进度:updated/total
9.2 工作流编排算法
|
编排模式 |
模式 |
控制流 |
数学表示 |
执行引擎 |
|---|---|---|---|---|
|
顺序执行 |
串行 |
有向无环图 |
拓扑排序 |
工作流引擎 |
|
事件驱动 |
响应事件 |
事件-条件-动作 |
有限状态机 |
事件驱动架构 |
|
数据流 |
数据依赖 |
数据驱动 |
数据流图 |
数据流引擎 |
|
编排语言 |
YAML |
声明式 |
工作流定义 |
编排器 |
工作流建模:
DAG表示:
-
节点:V={v1,v2,...,vn}(任务)
-
边:E={(vi,vj)}(依赖)
-
执行时间:t(vi)
-
最早开始时间:EST(vj)=max(vi,vj)∈E(EST(vi)+t(vi))
-
关键路径:最长路径
状态机模型:
-
状态:S={s1,s2,...,sm}
-
转移:δ:S×Event→S
-
动作:α:S×Event→Action
-
执行:run(state,event)→(new_state,action)
数据流执行:
-
操作符:op:Data→Data
-
数据流:data→op1→...→opn→result
-
并行性:独立数据流并行执行
-
流水线:阶段重叠执行
9.3 服务网格算法
|
网格功能 |
算法 |
控制平面 |
数据平面 |
实现机制 |
|---|---|---|---|---|
|
服务发现 |
注册中心 |
服务注册表 |
端点选择 |
Consul |
|
流量管理 |
路由规则 |
规则配置 |
路由决策 |
路由表 |
|
安全通信 |
mTLS |
证书管理 |
TLS握手 |
安全上下文 |
|
可观测性 |
指标收集 |
指标聚合 |
数据收集 |
指标导出 |
服务网格控制:
服务发现:
-
注册:service→(endpoints,metadata)
-
发现:query(service)→endpoints
-
健康检查:check(endpoint)→healthy/unhealthy
-
负载均衡:select(endpoints)→endpoint
流量路由:
-
路由规则:match(condition)→route(action)
-
条件:headers,path,method,source,...
-
动作:destination,weight,timeout,retry,...
-
决策:evaluate(rules,request)→route
mTLS连接:
-
证书交换:client_cert↔server_cert
-
身份验证:verify(cert)→identity
-
密钥协商:ECDHE或RSA
-
加密通信:AES−GCM或ChaCha20−Poly1305
10. 异构硬件协同计算
10.1 GPU计算算法
|
GPU计算 |
优化技术 |
性能模型 |
数学基础 |
硬件特性 |
|---|---|---|---|---|
|
并行模式 |
SIMT |
并行度 |
并行算法 |
CUDA核心 |
|
内存优化 |
共享内存 |
带宽利用 |
内存访问模式 |
内存层次 |
|
通信优化 |
warp内通信 |
通信开销 |
通信模式 |
warp shuffle |
|
库与框架 |
cuBLAS |
算子优化 |
线性代数 |
张量核心 |
GPU性能模型:
执行时间:T=Tcompute+Tmemory+Tsync+Toverhead
计算时间:Tcompute=Ppeak×ηcomputeNflop
内存时间:Tmemory=BeffectiveNbyte
其中:
-
Ppeak:峰值性能
-
ηcompute:计算效率
-
Beffective:有效带宽
占用率:occupancy=max warpsactive warps
延迟隐藏:需要 warps≥issue timelatency
优化策略:
-
最大化并行度
-
优化内存访问
-
隐藏延迟
-
减少发散
10.2 FPGA计算算法
|
FPGA计算 |
设计方法 |
优化目标 |
数学模型 |
硬件架构 |
|---|---|---|---|---|
|
高层次综合 |
C/C++综合 |
吞吐量 |
流水线优化 |
可编程逻辑 |
|
流水线设计 |
流水线深度 |
时钟频率 |
流水线模型 |
寄存器 |
|
数据流架构 |
流处理 |
数据重用 |
数据流图 |
FIFO |
|
部分重配置 |
动态重配置 |
资源节省 |
配置调度 |
配置存储器 |
FPGA性能模型:
吞吐量:throughput=initiation intervaldata width×fclk
资源利用:utilization=availableused
功耗:P=Pstatic+Pdynamic=Pstatic+αCV2f
优化方法:
-
循环展开:unroll factor=k
-
流水线:II=1
-
数据流:streaming with dataflow
-
数组分区:partition factor=n
10.3 智能网卡计算
|
智能网卡 |
卸载功能 |
性能优势 |
数学模型 |
硬件架构 |
|---|---|---|---|---|
|
网络卸载 |
TCP/IP |
CPU节省 |
协议处理开销 |
网络处理器 |
|
存储卸载 |
NVMe-oF |
IOPS提升 |
存储栈开销 |
存储处理器 |
|
安全卸载 |
TLS/IPsec |
安全性能 |
加密开销 |
密码引擎 |
|
计算卸载 |
键值存储 |
专用计算 |
计算通信比 |
计算引擎 |
卸载效益分析:
CPU节省:ΔCPU=CPUhost−CPUsmartnic
延迟降低:Δlatency=latencyhost−latencysmartnic
吞吐提升:Δthroughput=throughputsmartnic−throughputhost
卸载条件:communicationcomputation>threshold
卸载决策模型:
-
输入:task characteristics,system state
-
输出:offload decision
-
目标:min completion time or energy
-
约束:resource limits
10.4 存算一体架构
|
存算一体 |
技术 |
计算模式 |
数学原理 |
硬件实现 |
|---|---|---|---|---|
|
近存计算 |
HBM计算 |
内存侧计算 |
数据局部性 |
高带宽内存 |
|
存内计算 |
模拟计算 |
内存内计算 |
矩阵向量乘 |
忆阻器 |
|
存算芯片 |
专用芯片 |
定制计算 |
特定算法映射 |
存算一体芯片 |
存算一体优势:
带宽:Bmemory>>Bbus
能效:Ecompute−in−memory<<Evon−neumann
计算密度:ops/mm2更高
应用场景:
-
矩阵运算
-
神经网络推理
-
图计算
-
数据库操作
挑战:
-
精度控制
-
编程模型
-
系统集成
-
测试验证
11. 稀土行业特定优化
11.1 稀土生产优化
|
优化领域 |
算法 |
数学建模 |
优化目标 |
硬件系统 |
|---|---|---|---|---|
|
采矿优化 |
资源评估 |
地质统计 |
开采率最大化 |
地质传感器 |
|
分离优化 |
流程控制 |
化学反应动力学 |
回收率最大化 |
过程控制系统 |
|
提纯优化 |
结晶控制 |
相图分析 |
能耗最小化 |
电解槽控制 |
|
尾矿处理 |
废物利用 |
物质平衡 |
废物最小化 |
尾矿处理系统 |
采矿优化模型:
资源评估:
-
矿床模型:grade(x,y,z)
-
储量计算:reserve=∫∫∫grade(x,y,z)dxdydz
-
不确定性:σgrade
开采规划:
-
决策变量:xt,b∈{0,1}(块b在时间t开采)
-
目标:max NPV=∑t(1+r)tcashflowt
-
约束:开采顺序、设备容量、混合要求
分离过程优化:
化学反应模型:
-
反应速率:r=kCAαCBβ
-
质量平衡:dtdC=in−out+reaction
-
能量平衡:dtdT=heat in−heat out+heat generation
优化控制:
-
状态:x=(C,T,P,...)
-
控制:u=(flow,temp,stir,...)
-
目标:min J=∫0T(x−xref)TQ(x−xref)+uTRu dt
-
约束:xmin≤x≤xmax, umin≤u≤umax
11.2 供应链优化
|
供应链环节 |
优化问题 |
数学模型 |
算法 |
信息系统 |
|---|---|---|---|---|
|
采购优化 |
供应商选择 |
多目标规划 |
供应商评估 |
供应商管理系统 |
|
库存优化 |
安全库存 |
库存模型 |
(s,S)策略 |
库存管理系统 |
|
物流优化 |
运输路径 |
车辆路径问题 |
启发式算法 |
运输管理系统 |
|
需求预测 |
销售量预测 |
时间序列 |
ARIMA, LSTM |
需求预测系统 |
库存优化模型:
经济订货量:
-
年需求量:D
-
订货成本:S
-
持有成本:H
-
EOQ:Q∗=H2DS
安全库存:
-
需求标准差:σD
-
提前期标准差:σL
-
服务水平:z
-
安全库存:SS=zLσD2+D2σL2
随机库存模型:
-
状态:inventory level
-
决策:order quantity
-
成本:holding cost+shortage cost+order cost
-
目标:min expected cost
物流优化:
车辆路径问题:
-
节点:V={0,1,...,n}(0为仓库)
-
距离:dij
-
需求:qi
-
车辆容量:Q
-
目标:min ∑k∑(i,j)dijxijk
-
约束:容量、访问、回路
11.3 质量控制与追溯
|
质量控制 |
方法 |
统计基础 |
优化目标 |
硬件系统 |
|---|---|---|---|---|
|
统计过程控制 |
控制图 |
统计分布 |
过程稳定 |
在线检测 |
|
质量预测 |
缺陷预测 |
机器学习 |
提前预警 |
传感器网络 |
|
追溯系统 |
批次追溯 |
区块链 |
完整追溯 |
RFID/二维码 |
|
质量改进 |
实验设计 |
实验设计 |
质量特性优化 |
实验自动化 |
统计过程控制:
控制图:
-
中心线:CL=μ
-
控制限:UCL/LCL=μ±3σ
-
规则:点出界、趋势、循环等
过程能力指数:
-
Cp=6σUSL−LSL
-
Cpk=min(3σUSL−μ,3σμ−LSL)
-
Pp,Ppk:长期过程能力
质量预测模型:
分类模型:
-
特征:x=(x1,x2,...,xd)
-
标签:y∈{合格,不合格}
-
模型:p(y∥x)=f(x;θ)
-
决策:if p(不合格∥x)>threshold then reject
异常检测:
-
正常数据分布:p(x∥normal)
-
异常得分:score(x)=−log p(x∥normal)
-
检测:if score(x)>threshold then anomaly
追溯系统:
区块链追溯:
-
区块:block=(hashprev,timestamp,data,nonce,hash)
-
数据:data=(product_id,batch,process,quality,...)
-
查询:trace(product_id)→full history
-
验证:verify(blockchain)→valid/invalid
12. 系统全栈优化框架
12.1 跨层联合优化
|
优化层次 |
耦合关系 |
联合优化问题 |
数学建模 |
求解方法 |
|---|---|---|---|---|
|
应用-系统 |
QoS要求-资源分配 |
应用性能优化 |
效用函数优化 |
分层优化 |
|
软件-硬件 |
算法-架构协同 |
算法映射优化 |
性能模型 |
软硬件协同设计 |
|
计算-存储-网络 |
数据局部性-通信开销 |
数据布局优化 |
数据流分析 |
联合调度 |
|
性能-功耗-可靠性 |
性能功耗权衡 |
多目标优化 |
帕累托前沿 |
多目标优化 |
联合优化模型:
应用-资源联合优化:
-
应用效用:Ui(perfi)
-
资源成本:Cj(utilj)
-
目标:max ∑Ui−∑Cj
-
约束:∑rij≤Rj, perfi≥SLAi
软硬件协同优化:
-
软件实现:perfsw,powersw
-
硬件实现:perfhw,powerhw,areahw
-
决策:implement in sw or hw
-
目标:min cost s.t. perf constraint
跨层数据优化:
-
计算位置:where to compute
-
数据位置:where to store
-
通信模式:how to communicate
-
目标:min completion time or energy
12.2 自适应与学习优化
|
自适应技术 |
学习机制 |
适应目标 |
数学模型 |
实现框架 |
|---|---|---|---|---|
|
在线学习 |
强化学习 |
动态适应 |
遗憾最小化 |
在线学习系统 |
|
元学习 |
学习学习 |
快速适应 |
元优化 |
元学习框架 |
|
迁移学习 |
领域适应 |
跨域泛化 |
域差异最小化 |
迁移学习平台 |
|
联邦学习 |
分布式训练 |
协同学习 |
联邦平均 |
联邦学习框架 |
强化学习优化:
马尔可夫决策过程:
-
状态:s∈S
-
动作:a∈A
-
转移:P(s′∥s,a)
-
奖励:r(s,a)
-
策略:π(a∥s)
-
值函数:Vπ(s)=E[∑γtrt∥s0=s]
Q学习:
-
Q值:Q(s,a)
-
更新:Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)]
-
策略:π(s)=argmaxaQ(s,a)
策略梯度:
-
目标:J(θ)=E[∑rt]
-
梯度:∇θJ(θ)=E[∇θlogπθ(a∥s)Qπ(s,a)]
-
更新:θ←θ+α∇θJ(θ)
元学习:
模型无关元学习:
-
任务分布:p(T)
-
内循环:θi′=θ−α∇θLTi(fθ)
-
外循环:θ←θ−β∇θ∑TiLTi(fθi′)
-
快速适应
13. 分布式系统架构与设计模式
13.1 分布式系统设计范式
|
设计范式 |
核心思想 |
数学基础 |
一致性模型 |
硬件架构 |
|---|---|---|---|---|
|
微服务架构 |
服务拆分 |
图论 |
最终一致性 |
容器编排 |
|
事件驱动架构 |
异步通信 |
事件流处理 |
时序一致性 |
消息队列 |
|
无服务器架构 |
函数即服务 |
函数计算 |
幂等性保证 |
冷启动优化 |
|
边缘计算架构 |
分布式计算 |
网络拓扑 |
边缘一致性 |
边缘节点 |
数学建模:
微服务依赖图:
-
服务:S={s1,s2,...,sn}
-
依赖:E={(si,sj)∣si→sj}
-
调用延迟:dij
-
可用性:As=∏si∈critical_pathAsi
事件溯源状态重建:
-
事件序列:E=[e1,e2,...,en]
-
状态函数:S=fold(apply,S0,E)
-
快照:Snapshotk=S(tk)
-
重建:S(t)=fold(apply,Snapshotk,E[k+1:t])
无服务器性能模型:
-
冷启动时间:tcold
-
热执行时间:twarm
-
调用间隔:tinterval
-
冷启动概率:Pcold=e−λtkeepalive
13.2 分布式存储架构
|
存储架构 |
数据模型 |
一致性协议 |
数学保证 |
硬件实现 |
|---|---|---|---|---|
|
键值存储 |
KV对 |
最终一致性 |
CRDT |
SSD优化 |
|
列式存储 |
列族 |
行级原子性 |
列压缩算法 |
列存储引擎 |
|
文档存储 |
JSON/BSON |
文档级事务 |
文档模式 |
文档解析 |
|
图数据库 |
属性图 |
图事务 |
图论算法 |
图计算硬件 |
性能模型:
键值存储吞吐量:
-
操作:op∈{get,put,delete}
-
延迟:latency=tnetwork+tqueue+tprocess
-
吞吐:throughput=latencyconcurrency
-
持久性:durability=1−P(data_loss)
列存储压缩率:
-
原始大小:Sraw
-
压缩后:Scompressed=∑colfcomp(col)
-
压缩比:CR=ScompressedSraw
-
查询性能:tquery=tdecompress+tscan
图查询复杂度:
-
邻居查询:O(degree(v))
-
最短路径:O(∣V∣+∣E∣)
-
子图匹配:O(∣V∣k)
-
图遍历:O(∣V∣+∣E∣)
13.3 分布式计算架构
|
计算模式 |
编程模型 |
通信模式 |
数学抽象 |
硬件加速 |
|---|---|---|---|---|
|
MapReduce |
Map/Reduce |
批量通信 |
函数式编程 |
排序网络 |
|
数据流 |
有向无环图 |
流水线 |
数据流图 |
流处理器 |
|
参数服务器 |
参数聚合 |
异步通信 |
优化算法 |
参数存储 |
|
Actor模型 |
消息传递 |
异步消息 |
进程代数 |
消息传递硬件 |
计算模型:
MapReduce复杂度:
-
Map阶段:O(N)
-
Shuffle阶段:O(NlogN)
-
Reduce阶段:O(M)
-
总复杂度:O(NlogN)
数据流吞吐量:
-
操作符吞吐:Ti
-
流水线深度:d
-
系统吞吐:T=min(T1,T2,...,Td)
-
延迟:L=∑i=1dLi
参数服务器收敛:
-
参数:w
-
梯度:g=∇f(w)
-
更新:w←w−η(g+λw)
-
收敛条件:‖∇f(w)‖<ε
14. 分布式机器学习算法
14.1 分布式训练算法
|
训练范式 |
并行策略 |
同步机制 |
数学优化 |
硬件系统 |
|---|---|---|---|---|
|
数据并行 |
数据分片 |
同步SGD |
随机优化 |
多GPU |
|
模型并行 |
层分割 |
前向/后向依赖 |
计算图分割 |
模型并行硬件 |
|
流水线并行 |
阶段分割 |
1F1B调度 |
流水线优化 |
流水线硬件 |
|
混合并行 |
3D并行 |
分层同步 |
多维分解 |
异构系统 |
优化算法:
同步SGD:
-
局部梯度:gi=∇fi(w)
-
全局梯度:g=N1∑i=1Ngi
-
更新:w←w−ηg
-
收敛率:O(1/T)
梯度压缩:
-
稀疏化:gsparse=topk(g)
-
量化:gquant=Q(g)
-
误差补偿:e←e+g−gcompressed
-
收敛性:有界误差
流水线并行调度:
-
微批数量:m
-
流水线阶段:p
-
气泡比例:B=m+p−1p−1
-
最优m:m≈Btargetp−1
14.2 联邦学习算法
|
联邦类型 |
隐私保护 |
通信优化 |
数学基础 |
系统实现 |
|---|---|---|---|---|
|
横向联邦 |
同构数据 |
安全聚合 |
分布式优化 |
联邦学习框架 |
|
纵向联邦 |
特征不同 |
隐私求交 |
安全多方计算 |
隐私计算平台 |
|
联邦迁移 |
领域适应 |
模型压缩 |
迁移学习 |
迁移学习框架 |
|
个性化联邦 |
客户端异构 |
元学习 |
多任务优化 |
个性化模型 |
联邦优化:
FedAvg算法:
-
本地更新:wit+1←wit−η∇fi(wit)
-
服务器聚合:wt+1=∑i=1Nnniwit+1
-
收敛条件:E[‖∇f(w)‖2]≤ε
差分隐私联邦:
-
梯度裁剪:g←g/max(1,‖g‖/C)
-
高斯噪声:g~=g+N(0,σ2C2I)
-
隐私预算:(ε,δ)-DP
-
隐私放大:子采样放大
安全聚合:
-
秘密共享:gi=∑j=1tsij
-
安全求和:g=∑i=1Ngimodp
-
隐私:服务器无法看到单个gi
14.3 分布式推理优化
|
推理优化 |
技术手段 |
延迟优化 |
数学方法 |
硬件加速 |
|---|---|---|---|---|
|
模型压缩 |
剪枝 |
计算量减少 |
稀疏优化 |
稀疏计算 |
|
流水线推理 |
阶段划分 |
吞吐提升 |
流水线调度 |
流水线硬件 |
|
缓存优化 |
特征缓存 |
重复计算避免 |
缓存替换策略 |
高速缓存 |
|
自适应推理 |
早期退出 |
计算跳过 |
决策网络 |
条件计算硬件 |
推理优化模型:
模型剪枝:
-
权重重要性:I(w)=∣w∣或梯度信息
-
剪枝率:r
-
稀疏度:s=1−r
-
准确度损失:Δacc=f(稀疏度)
量化优化:
-
量化函数:Q(x)=round(x/Δ)×Δ
-
量化误差:e=x−Q(x)
-
校准:最小化e的统计量
-
混合精度:不同层不同精度
早期退出:
-
出口点:exiti,i=1,...,k
-
置信度:confi=max(pi)
-
出口条件:confi>thresholdi
-
平均深度:E[depth]=∑P(exiti)×depthi
15. 分布式数据库算法
15.1 分布式事务处理
|
事务处理 |
并发控制 |
隔离级别 |
数学保证 |
系统实现 |
|---|---|---|---|---|
|
乐观并发 |
多版本控制 |
快照隔离 |
版本可见性 |
版本存储 |
|
悲观并发 |
两阶段锁 |
可重复读 |
锁兼容性 |
锁管理器 |
|
混合并发 |
乐观锁+悲观锁 |
可调隔离级别 |
冲突率预测 |
混合锁管理器 |
|
无锁并发 |
软件事务内存 |
线性化 |
原子性保证 |
原子指令 |
并发控制理论:
可串行化理论:
-
历史H:操作序列
-
冲突可串行化:SG(H)无环
-
视图可串行化:存在等价视图
-
可恢复性:事务提交前依赖的事务已提交
多版本并发控制:
-
版本链:V=[v1,v2,...,vn]
-
可见性规则:visible(v,t)=(v.ts≤t)∧(v.committed)
-
快照读取:snapshot(t)={v∣visible(v,t)}
死锁检测:
-
等待图:G=(V,E)
-
环检测:cycle∈G
-
处理:选择牺牲者中止
-
预防:等待-死亡、伤害-等待
15.2 分布式查询优化
|
查询优化 |
优化技术 |
代价模型 |
数学基础 |
系统组件 |
|---|---|---|---|---|
|
查询重写 |
谓词下推 |
等价变换 |
关系代数 |
查询重写器 |
|
连接优化 |
连接顺序 |
代价估计 |
连接树 |
优化器 |
|
分区优化 |
分区裁剪 |
网络代价 |
图划分 |
分区管理器 |
|
并行优化 |
操作符并行 |
并行度选择 |
并行算法 |
并行执行引擎 |
查询优化模型:
代价模型:
-
I/O代价:Cio=pages×costpage
-
CPU代价:Ccpu=tuples×costtuple
-
网络代价:Cnet=data×costtransfer
-
总代价:C=w1Cio+w2Ccpu+w3Cnet
动态规划优化:
-
状态:S,表的子集
-
代价:C(S,join)
-
递推:C(S1∪S2)=min(C(S1)+C(S2)+C(join))
-
复杂度:O(3n)
并行度选择:
-
数据大小:D
-
机器数:N
-
并行度:P=min(N,D/chunk_size)
-
最佳P:Popt=argminT(P)
15.3 分布式索引结构
|
索引类型 |
数据结构 |
分布策略 |
数学特性 |
硬件优化 |
|---|---|---|---|---|
|
B+树分布 |
全局B+树 |
范围分区 |
树高平衡 |
持久内存 |
|
LSM树分布 |
多级合并 |
键范围分区 |
写入放大 |
SSD优化 |
|
倒排索引 |
词项-文档 |
按词项分区 |
TF-IDF |
文本处理硬件 |
|
图索引 |
邻接索引 |
图划分 |
图遍历 |
图计算硬件 |
索引性能分析:
B+树性能:
-
树高:h=logmN,m为扇出
-
查询代价:O(h)
-
插入代价:O(h)
-
分裂概率:Psplit=1/m
LSM树性能:
-
写入放大:WA=L0L0+L1+...+Lk
-
读取放大:RA=结果数文件检查数
-
合并策略:大小分级、分层合并
倒排索引压缩:
-
文档ID差值编码:Δ=doci−doci−1
-
变长编码:Elias编码、VB编码
-
压缩率:CR=压缩后大小原始大小
16. 分布式流处理算法
16.1 流处理计算模型
|
流处理模型 |
时间语义 |
窗口模型 |
数学基础 |
系统实现 |
|---|---|---|---|---|
|
时间窗口 |
事件时间 |
滚动窗口 |
时间序列 |
水印生成 |
|
状态管理 |
算子状态 |
状态后端 |
状态一致性 |
状态存储 |
|
流表连接 |
流流连接 |
时间区间连接 |
关系代数扩展 |
连接算子 |
|
复杂事件 |
事件模式 |
状态机 |
复杂事件处理 |
模式检测 |
流处理理论:
水印生成:
-
事件时间:te
-
处理时间:tp
-
水印:w(t)=max(te)−δ
-
延迟容忍:δ
窗口聚合:
-
窗口定义:W=[start,end)
-
聚合函数:agg:Values→Result
-
增量聚合:aggnew=combine(aggold,new_value)
-
结果输出:emit(agg,window)
检查点算法:
-
屏障:barrier
-
状态快照:snapshot(state)
-
一致性保证:恰好一次
-
恢复:从最新检查点恢复
16.2 流处理优化
|
优化技术 |
优化目标 |
优化方法 |
数学分析 |
实现机制 |
|---|---|---|---|---|
|
算子融合 |
减少序列化 |
算子链 |
数据流图优化 |
任务调度 |
|
负载均衡 |
并行度调整 |
键组重分区 |
负载预测 |
动态分区 |
|
背压控制 |
防止过载 |
反压传播 |
控制理论 |
反压机制 |
|
状态优化 |
状态大小 |
状态清理 |
状态生命周期 |
状态后端 |
性能优化模型:
数据倾斜处理:
-
键分布:P(key)
-
热键识别:if count(key)>threshold
-
解决方案:本地聚合、拆分键、随机后缀
-
效果:skewness=平均负载maxload
背压控制:
-
队列长度:Q(t)
-
输入速率:λ(t)
-
处理速率:μ(t)
-
控制律:λ(t+1)=f(Q(t),λ(t),μ(t))
状态清理:
-
状态TTL:ttl
-
清理策略:惰性清理、主动清理
-
内存节省:saved=∑s.expiredsize(s)
-
精度影响:Δ=准确值−清理后值
17. 分布式图计算算法
17.1 图计算模型
|
计算模型 |
计算模式 |
同步模型 |
数学抽象 |
系统框架 |
|---|---|---|---|---|
|
顶点中心 |
顶点程序 |
超级步 |
图算法 |
Pregel |
|
边中心 |
边程序 |
GAS模型 |
边计算 |
PowerGraph |
|
子图中心 |
子图程序 |
分区内计算 |
子图算法 |
Naiad |
|
路径中心 |
路径计算 |
增量计算 |
路径代数 |
Grail |
图计算理论:
BSP模型:
-
超级步:superstep
-
计算:compute()
-
通信:send(msg)
-
同步:barrier
GAS模型:
-
Gather:Σu∈N(v)msg(u,v)
-
Apply:new_state=apply(state,Σ)
-
Scatter:∀u∈N(v):send(msg)
收敛条件:
-
活跃顶点:active(v)=true
-
终止条件:∀v:!active(v)
-
消息阈值:if msg<ε
17.2 图划分算法
|
划分策略 |
划分目标 |
划分算法 |
数学优化 |
系统支持 |
|---|---|---|---|---|
|
边划分 |
最小化边割 |
METIS |
图划分问题 |
分布式存储 |
|
顶点划分 |
顶点均衡 |
哈希划分 |
哈希函数 |
顶点存储 |
|
动态划分 |
自适应调整 |
负载感知 |
在线优化 |
动态迁移 |
|
多层划分 |
层次划分 |
递归划分 |
层次分解 |
层次存储 |
图划分优化:
边割最小化:
-
图G=(V,E)
-
划分P={P1,P2,...,Pk}
-
边割:cut(P)=∣{(u,v)∈E∣u∈Pi,v∈Pj,i=j}∣
-
目标:min cut(P),s.t. ∣Pi∣≈∣V∣/k
负载均衡:
-
负载:L(Pi)=∣Pi∣+α⋅cuti
-
均衡度:balance=minL(Pi)maxL(Pi)
-
约束:balance≤β
动态调整:
-
迁移代价:costmove(v)
-
收益:gain=Δcut−λ⋅costmove
-
决策:if gain>0 then move
17.3 图算法优化
|
图算法 |
优化技术 |
收敛加速 |
数学原理 |
硬件加速 |
|---|---|---|---|---|
|
PageRank |
块迭代 |
收敛判断 |
马尔可夫链 |
稀疏矩阵乘法 |
|
连通分量 |
标签传播 |
路径压缩 |
等价关系 |
并查集硬件 |
|
最短路径 |
Delta步进 |
启发式搜索 |
动态规划 |
图遍历硬件 |
|
社区发现 |
Louvain算法 |
模块度优化 |
模块度最大化 |
社区检测硬件 |
算法优化模型:
PageRank优化:
-
基本迭代:PR=α⋅M⋅PR+(1−α)⋅v
-
增量更新:ΔPR=α⋅M⋅ΔPR
-
收敛:‖ΔPR‖<ε
-
块更新:分块矩阵乘法
连通分量优化:
-
并查集操作:find(x),union(x,y)
-
路径压缩:find(x)时压缩路径
-
按秩合并:小树合并到大树
-
复杂度:O(α(n))
最短路径优化:
-
Dijkstra算法:O(∣E∣+∣V∣log∣V∣)
-
Delta步进:按距离分桶
-
双向搜索:从起点和终点同时搜索
-
A*算法:f(n)=g(n)+h(n)
18. 分布式数值计算算法
18.1 大规模线性代数
|
线性代数 |
问题类型 |
分布式算法 |
数学基础 |
硬件加速 |
|---|---|---|---|---|
|
线性系统 |
稠密系统 |
直接法 |
矩阵分解 |
矩阵计算硬件 |
|
特征值 |
标准特征值 |
幂法 |
特征值分解 |
特征值加速器 |
|
矩阵乘法 |
稠密乘法 |
Cannon算法 |
矩阵分块 |
矩阵乘法单元 |
|
最小二乘 |
线性最小二乘 |
正规方程 |
优化理论 |
最小二乘求解器 |
分布式算法:
矩阵乘法SUMMA:
-
矩阵分块:Aij,Bij
-
广播:Aik行广播,Bkj列广播
-
计算:Cij=∑kAikBkj
-
通信量:O(n2/P)
共轭梯度法:
-
初始:r0=b−Ax0,p0=r0
-
迭代:αk=rkTrk/pkTApk
-
更新:xk+1=xk+αkpk
-
收敛:‖rk‖/‖r0‖<ε
并行Lanczos:
-
三对角化:T=QTAQ
-
并行正交化:qk+1=Aqk−αkqk−βk−1qk−1
-
特征值:T的特征值近似A的特征值
-
重新正交化:保持正交性
18.2 偏微分方程求解
|
PDE类型 |
数值方法 |
并行策略 |
数学基础 |
硬件系统 |
|---|---|---|---|---|
|
有限差分 |
显式格式 |
区域分解 |
差分格式 |
规则网格计算 |
|
有限元 |
伽辽金法 |
域分解 |
变分原理 |
不规则网格 |
|
有限体积 |
守恒格式 |
网格分割 |
积分形式 |
控制体积 |
|
谱方法 |
傅里叶谱 |
谱空间并行 |
正交多项式 |
FFT硬件 |
并行求解策略:
区域分解:
-
子域:Ω=∪Ωi
-
界面条件:ui=ujon Γij
-
协调:Schwarz交替法、子结构法
-
通信:界面数据交换
多重网格:
-
网格层次:h,2h,4h,...
-
平滑:在高频误差
-
限制:细网格→粗网格
-
插值:粗网格→细网格
-
并行:层间并行、层内并行
时间并行:
-
Parareal算法:un+1=F(un)
-
粗网格预测:G近似F
-
精细校正:uk+1n+1=F(ukn)+G(uk+1n)−G(ukn)
-
并行度:时间步数
18.3 随机微分方程求解
|
SDE类型 |
数值方法 |
并行策略 |
数学理论 |
计算系统 |
|---|---|---|---|---|
|
伊藤SDE |
欧拉-丸山 |
路径并行 |
伊藤积分 |
随机数生成 |
|
随机PDE |
有限元离散 |
空间并行 |
随机场 |
随机场生成 |
|
倒向SDE |
最小二乘蒙特卡洛 |
时间反向 |
非线性Feynman-Kac |
神经网络训练 |
|
跳跃扩散 |
复合泊松 |
事件驱动 |
跳跃过程 |
事件处理 |
数值方法:
欧拉-丸山方法:
-
离散:Xn+1=Xn+a(tn,Xn)Δt+b(tn,Xn)ΔWn
-
收敛阶:强0.5,弱1.0
-
稳定性:条件稳定
Milstein方法:
-
离散:Xn+1=Xn+aΔt+bΔWn+21bb′(ΔWn2−Δt)
-
收敛阶:强1.0
-
复杂度:需要导数b′
多级蒙特卡洛:
-
层次:L级,网格hl=2−lh0
-
估计:E[P]≈∑l=0LE[Pl−Pl−1]
-
样本数:Nl∝hlγ
-
复杂度:O(ε−2(logε)2)
19. 分布式优化与控制
19.1 分布式优化算法
|
优化问题 |
算法类型 |
通信模式 |
收敛性 |
硬件实现 |
|---|---|---|---|---|
|
无约束优化 |
分布式梯度下降 |
同步 |
线性收敛 |
梯度计算 |
|
约束优化 |
分布式投影梯度 |
协调优化 |
收敛到KKT点 |
约束处理 |
|
非凸优化 |
分布式次梯度 |
块更新 |
收敛到驻点 |
块计算 |
|
复合优化 |
近端梯度 |
方差缩减 |
线性收敛 |
近端算子 |
算法分析:
分布式梯度下降:
-
更新:xik+1=∑j∈Niwijxjk−α∇fi(xik)
-
收敛条件:α<1/L
-
收敛率:O(1/k)
分布式ADMM:
-
原问题:min∑fi(xi),s.t. xi=z
-
增广拉格朗日:Lρ=∑fi(xi)+λiT(xi−z)+2ρ‖xi−z‖2
-
更新:xi最小化,z平均,λi更新
-
收敛:线性收敛
对偶分解:
-
原问题:minf(x)+g(z),s.t. Ax+Bz=c
-
对偶函数:d(λ)=minx,zL(x,z,λ)
-
对偶上升:λk+1=λk+α(Axk+Bzk−c)
-
收敛:对偶问题凸时收敛
19.2 分布式控制算法
|
控制问题 |
控制策略 |
通信需求 |
数学理论 |
硬件系统 |
|---|---|---|---|---|
|
一致性控制 |
平均一致性 |
邻居通信 |
图论 |
传感器网络 |
|
编队控制 |
位置编队 |
相对测量 |
刚体变换 |
多机器人系统 |
|
群集控制 |
Reynolds规则 |
局部交互 |
势函数 |
无人机群 |
|
优化控制 |
模型预测控制 |
状态共享 |
优化理论 |
智能控制器 |
控制算法:
平均一致性:
-
更新:xi(k+1)=∑j∈Niwijxj(k)
-
收敛条件:W双随机,图连通
-
收敛值:x∗=n1∑xi(0)
-
收敛率:ρ(W−n111T)
模型预测控制:
-
优化:min∑t=0N−1ℓ(xt,ut)+Vf(xN)
-
约束:xt+1=f(xt,ut),g(xt,ut)≤0
-
分布式:邻居状态耦合约束
-
求解:分布式优化算法
强化学习控制:
-
状态:s
-
动作:a
-
奖励:r
-
Q学习:Q(s,a)←Q(s,a)+α[r+γmaxa′Q(s′,a′)−Q(s,a)]
-
分布式:经验共享、参数平均
20. 系统全栈优化
20.1 跨层优化框架
|
优化层次 |
优化问题 |
联合优化 |
数学模型 |
求解方法 |
|---|---|---|---|---|
|
应用-系统 |
QoS感知调度 |
效用最大化 |
max U(perf)−C(res) |
双层规划 |
|
软件-硬件 |
算法-架构协同 |
性能建模 |
perf=f(alg,arch,data) |
协同设计 |
|
计算-存储-网络 |
数据布局优化 |
数据流优化 |
min T=Tcomp+Tmem+Tcomm |
联合调度 |
|
性能-功耗-可靠性 |
多目标优化 |
帕累托优化 |
min [T,P,R]T |
多目标优化 |
联合优化模型:
应用-资源联合:
-
应用效用:Ui(perfi)
-
资源成本:Cj(utilj)
-
目标:max ∑Ui−∑Cj
-
约束:∑rij≤Rj, perfi≥SLAi
数据流优化:
-
数据位置:loc(d)
-
计算位置:loc(c)
-
通信:comm(d,c)=f(size(d),distance)
-
目标:min maxpath(comp+comm)
多目标优化:
-
目标向量:F(x)=[f1(x),f2(x),...,fk(x)]
-
帕累托前沿:P={x∣¬∃y:F(y)≺F(x)}
-
求解:加权和、ε约束、进化多目标
20.2 自适应与学习系统
|
自适应技术 |
学习方法 |
适应目标 |
数学模型 |
实现框架 |
|---|---|---|---|---|
|
在线学习 |
强化学习 |
动态适应 |
遗憾分析 |
在线学习系统 |
|
元学习 |
学习学习 |
快速适应 |
元优化 |
元学习框架 |
|
迁移学习 |
领域适应 |
跨域泛化 |
域差异 |
迁移平台 |
|
联邦学习 |
横向联邦 |
隐私保护 |
分布式优化 |
联邦框架 |
学习系统:
在线凸优化:
-
损失函数:ft(x)
-
决策:xt
-
遗憾:Regret=∑ft(xt)−minx∑ft(x)
-
算法:在线梯度下降、FTRL
-
遗憾界:O(T)
元学习:
-
任务分布:p(T)
-
内循环:θ′=θ−α∇LT(θ)
-
外循环:θ←θ−β∇∑LT(θ′)
-
快速适应:少量样本适应新任务
联邦学习收敛:
-
局部更新:wit+1←wit−η∇fi(wit)
-
聚合:wt+1=∑nniwit+1
-
收敛:E[‖∇f(w)‖2]≤ε
-
通信轮数:O(1/ε)
20.3 可观测性与诊断
|
观测维度 |
观测指标 |
分析方法 |
数学模型 |
工具系统 |
|---|---|---|---|---|
|
性能观测 |
延迟 |
统计分布 |
排队模型 |
监控系统 |
|
资源观测 |
CPU/内存 |
资源利用率 |
资源模型 |
资源监控 |
|
故障观测 |
异常检测 |
异常检测 |
故障模型 |
故障诊断 |
|
安全观测 |
入侵检测 |
模式识别 |
威胁模型 |
安全监控 |
诊断分析:
异常检测:
-
指标:xt
-
预测:x^t=f(xt−1,xt−2,...)
-
残差:rt=xt−x^t
-
异常:if ∣rt∣>kσ
根因分析:
-
因果图:G=(V,E)
-
证据:E=e1,e2,...
-
推理:P(cause∣evidence)
-
算法:贝叶斯网络、结构方程模型
性能分析:
-
服务时间:S
-
到达率:λ
-
排队延迟:Wq=μ(1−ρ)ρ
-
利用率:ρ=λ/μ
这个庞大的数学方法体系涵盖了分布式云操作系统从底层硬件到上层应用的所有关键方面。每个领域都有其深厚的数学基础和算法实现,而实际系统设计时需要根据具体需求进行选择和组合。
条目21:分布式系统的形式化验证方法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
形式化方法与逻辑 / 系统验证 / 分布式系统 |
|
模型配方 |
问题:验证分布式系统的安全性、活性、一致性等属性。系统模型为M=(S,S0,R,L),其中S是状态集合,S0⊆S是初始状态,R⊆S×S是转移关系,L:S→2AP是标签函数。要验证的属性用时序逻辑公式φ表示。 |
|
算法/模型/方法名称 |
模型检测与时序逻辑验证 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 系统建模 |
|
理论基础和规律 |
1. 模态逻辑与时序逻辑 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
逻辑特征: |
|
时序和交互流程 |
验证流程: |
条目22:量子分布式计算
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
量子计算与信息 / 分布式量子计算 / 量子网络 |
|
模型配方 |
问题:在分布式量子系统中执行计算任务,系统由多个量子节点组成,节点间通过量子信道连接。每个节点有局部量子寄存器,可执行局部量子门操作。节点间可通过量子隐形传态或量子交换共享纠缠。 |
|
算法/模型/方法名称 |
分布式量子算法与量子网络编码 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 量子系统模型 |
|
理论基础和规律 |
1. 量子力学基础 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
代数特征: |
|
时序和交互流程 |
量子计算流程: |
条目23:生物启发分布式算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
生物数学与仿生学 / 群体智能 / 自组织系统 |
|
模型配方 |
问题:设计分布式算法解决优化、模式形成、任务分配等问题,受生物系统(蚁群、鸟群、免疫系统、神经网络)启发。系统由大量简单个体组成,个体间通过局部交互产生全局智能行为。 |
|
算法/模型/方法名称 |
群体智能与自组织算法 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 蚁群优化 |
|
理论基础和规律 |
1. 自组织理论 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
动力系统特征: |
|
时序和交互流程 |
典型流程: |
条目24:数字孪生数学建模
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
工业数字孪生与CPS / 多物理场建模 / 模型修正 |
|
模型配方 |
问题:为物理实体创建高保真数字孪生体,需要融合多源数据(传感器、物理模型、历史数据)并进行实时同步。物理系统由偏微分方程描述:L(u)=f,边界条件B(u)=g,初始条件u(x,0)=u0(x)。 |
|
算法/模型/方法名称 |
数据-物理融合建模与实时同步 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 多物理场建模 |
|
理论基础和规律 |
1. 偏微分方程理论 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
分析特征: |
|
时序和交互流程 |
数字孪生生命周期: |
条目25:边缘计算中的分布式优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算与雾计算 / 分布式优化 / 资源管理 |
|
模型配方 |
问题:在边缘计算环境中,有N个边缘节点,M个移动设备,设备i有计算任务Ti=(Di,Ci,Timax),其中Di是数据量,Ci是计算量,Timax是最大延迟。任务可本地执行或卸载到边缘节点。边缘节点j有计算能力Fj和存储Sj。 |
|
算法/模型/方法名称 |
边缘计算中的联合卸载与资源分配 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 系统模型 |
|
理论基础和规律 |
1. 优化理论 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
优化特征: |
|
时序和交互流程 |
卸载决策流程: |
条目26:分布式系统中的信息几何
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
信息几何与统计流形 / 分布式学习 / 优化 |
|
模型配方 |
问题:在统计流形S={p(x;θ):θ∈Θ⊂Rd}上设计分布式学习与优化算法。流形配备Fisher信息度量gij(θ)=Eθ[∂ilθ∂jlθ],其中lθ=logp(x;θ)。 |
|
算法/模型/方法名称 |
黎曼分布式优化与自然梯度 |
|
算法/模型/方法的逐步思考推理过程及每一个步骤的数学方程式和变量/常量/参数列表及说明 |
1. 信息几何基础 |
|
理论基础和规律 |
1. 微分几何 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
几何特征: |
|
时序和交互流程 |
分布式学习流程: |
总结与展望
新兴交叉方向
-
神经符号计算:
-
结合神经网络与符号推理
-
可微逻辑编程
-
知识图谱推理
-
-
因果推断与学习:
-
结构因果模型
-
因果发现算法
-
反事实推理
-
-
拓扑数据分析:
-
持续同调
-
Mapper算法
-
拓扑深度学习
-
-
物理启发机器学习:
-
物理信息神经网络
-
哈密顿神经网络
-
对称性保持网络
-
硬件发展趋势
-
存算一体架构:
-
近存计算
-
存内计算
-
3D堆叠
-
-
光子计算:
-
集成光子芯片
-
光学神经网络
-
量子光子计算
-
-
神经形态计算:
-
脉冲神经网络硬件
-
忆阻器交叉阵列
-
事件驱动传感器
-
-
可重构计算:
-
动态可重构FPGA
-
粗粒度可重构阵列
-
软件定义硬件
-
系统级挑战
-
可扩展性:
-
算法如何随节点数扩展
-
通信与计算平衡
-
层次化架构设计
-
-
异构性:
-
硬件异构(CPU/GPU/FPGA/ASIC)
-
网络异构(有线/无线/光)
-
数据异构(结构/非结构/流)
-
-
不确定性:
-
随机故障
-
网络延迟
-
数据噪声
-
-
安全性:
-
拜占庭容错
-
隐私保护
-
可验证计算
-
数学前沿
-
最优传输理论:
-
Wasserstein距离
-
蒙日-安培方程
-
最优传输网络
-
-
随机矩阵理论:
-
大维随机矩阵谱分布
-
自由概率
-
矩阵浓度不等式
-
-
代数拓扑应用:
-
持续同调
-
胞腔复形
-
同调代数
-
-
非交换几何:
-
算子代数
-
指标定理
-
非交换概率
-
这个庞大的数学方法体系为分布式云操作系统提供了坚实的理论基础,实际系统设计需要根据具体需求选择和组合适当的方法。随着技术发展,新的数学工具和算法将不断涌现,推动分布式系统向更智能、更高效、更可靠的方向发展。
27. 云计算场景:弹性伸缩与资源调度
27.1 弹性伸缩算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云计算 / 弹性伸缩 / 资源调度 |
|
模型配方 |
问题:云环境中,应用负载随时间变化,需要动态调整分配的虚拟机实例数量。设时间离散为t=1,2,...,T,在时间t,应用负载为Lt,当前实例数为nt,每个实例处理能力为C。目标是最小化总成本,包括资源成本和服务质量惩罚。 |
|
算法/模型/方法名称 |
基于预测的弹性伸缩算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 负载预测 |
|
理论基础和规律 |
1. 时间序列分析 |
|
应用场景和各类特征 |
场景: |
|
数学特征 |
优化特征: |
27.2 基于排队论的弹性伸缩模型
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
弹性伸缩 / 排队论 / 性能建模 |
|
模型配方 |
问题:系统接收请求,到达率为λ(t),服务率为μ。每个实例可并行处理c个请求。目标是动态调整实例数n(t),使得平均响应时间W(t)≤Wmax,同时最小化总成本∫C⋅n(t)dt。 |
|
算法/模型/方法名称 |
时变排队模型的最优控制 |
|
算法/模型/方法的逐步思考推理过程 |
1. 排队模型分析 |
|
数学特征 |
排队论: |
27.3 基于强化学习的弹性伸缩
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
强化学习 / 弹性伸缩 / 自适应控制 |
|
模型配方 |
问题:将弹性伸缩建模为马尔可夫决策过程。状态st=(λt,nt,ρt,Wt,t),动作at=Δnt∈{−k,...,0,...,k},奖励rt=−[C⋅nt+β⋅max(0,Wt−Wmax)]。学习策略π(at∥st)最大化累积折扣奖励E[∑γtrt]。 |
|
算法/模型/方法名称 |
深度确定性策略梯度(DDPG)弹性伸缩 |
|
算法/模型/方法的逐步思考推理过程 |
1. 状态表示 |
|
数学特征 |
强化学习: |
27.4 基于预测的伸缩策略
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
时间序列预测 / 资源规划 / 弹性伸缩 |
|
模型配方 |
问题:预测未来H个时间段的负载λt+1,...,λt+H,基于预测提前调整资源。预测误差et=λt−λ^t,调整策略需鲁棒。优化目标:minE[∑h=1H(C⋅nt+h+p⋅max(0,Wt+h−Wmax))],其中nt+h基于λ^t+h决定。 |
|
算法/模型/方法名称 |
模型预测控制(MPC)弹性伸缩 |
|
算法/模型/方法的逐步思考推理过程 |
1. 预测模型 |
|
数学特征 |
时间序列: |
27.5 混合伸缩策略
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
混合策略 / 弹性伸缩 / 自适应控制 |
|
模型配方 |
问题:结合反应式(基于当前指标)和预测式伸缩。设预测式策略给出ntpred,反应式策略给出ntreact。组合策略:nt=αt⋅ntpred+(1−αt)⋅ntreact,其中αt基于预测置信度调整。目标:在稳定时期用预测式(节省成本),在突变时期用反应式(保证SLA)。 |
|
算法/模型/方法名称 |
置信度自适应的混合伸缩 |
|
算法/模型/方法的逐步思考推理过程 |
1. 策略组件 |
|
数学特征 |
决策理论: |
27.6 基于控制理论的伸缩
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
控制理论 / PID控制 / 弹性伸缩 |
|
模型配方 |
问题:将系统视为被控对象,实例数n为控制输入,性能指标y(如响应时间)为输出,期望值r(Wmax)。设计控制器C使得y跟踪r。系统模型:y(t)=f(n(t),d(t)),其中d(t)是扰动(负载)。 |
|
算法/模型/方法名称 |
自适应PID控制器 |
|
算法/模型/方法的逐步思考推理过程 |
1. 系统辨识 |
|
数学特征 |
控制理论: |
27.7 基于博弈论的资源调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
博弈论 / 机制设计 / 资源分配 |
|
模型配方 |
问题:N个用户竞争M个资源,用户i对资源j的估值为vij,私有。设计分配规则xij∈{0,1}和支付规则pi,最大化社会福利∑i,jvijxij或平台收入∑ipi,满足激励相容(用户真实报价最优)和个体理性(用户参与不亏)。 |
|
算法/模型/方法名称 |
VCG机制与近似机制 |
|
算法/模型/方法的逐步思考推理过程 |
1. VCG机制 |
|
数学特征 |
机制设计: |
27.8 基于遗传算法的资源调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
进化计算 / 遗传算法 / 资源调度 |
|
模型配方 |
问题:将资源分配编码为染色体,如chrom=[x11,x12,...,xNM],xij∈{0,1}。适应度f(chrom)=−(成本+SLA违反)。通过选择、交叉、变异进化种群,找到近似最优解。 |
|
算法/模型/方法名称 |
混合编码遗传算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 编码设计 |
|
数学特征 |
进化计算: |
27.9 基于蚁群优化的资源调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
群体智能 / 蚁群优化 / 资源调度 |
|
模型配方 |
问题:将资源调度建模为路径选择问题。蚂蚁k构造解:顺序选择任务,分配给资源。信息素τij表示任务i分配给资源j的倾向。启发式信息ηij表示分配的优劣。概率:pijk=∑lτilαηilβτijαηijβ。 |
|
算法/模型/方法名称 |
最大-最小蚂蚁系统(MMAS) |
|
算法/模型/方法的逐步思考推理过程 |
1. 解构造 |
|
数学特征 |
群体智能: |
27.10 基于粒子群优化的资源调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
群体智能 / 粒子群优化 / 资源调度 |
|
模型配方 |
问题:粒子i的位置xi∈Rd表示分配方案,速度vi表示变化方向。每个粒子有历史最佳位置pi,群体有全局最佳位置g。更新: |
|
算法/模型/方法名称 |
离散粒子群优化(DPSO) |
|
算法/模型/方法的逐步思考推理过程 |
1. 离散编码 |
|
数学特征 |
群体智能: |
27.11-27.20 其他优化方法概要
27.11 模拟退火:以概率接受更差解,温度逐渐降低,避免局部最优。
27.12 禁忌搜索:维护禁忌表禁止近期访问的解,引导搜索多样化。
27.13 分支定界:精确算法,通过分支和定界剪枝搜索树,找到最优解。
27.14 动态规划:将问题分解为阶段,满足最优子结构,递推求解。
27.15 线性规划:线性目标函数和约束,单纯形法或内点法求解。
27.16 整数规划:决策变量为整数,分支定界或割平面法。
27.17 混合整数规划:部分变量连续,部分整数,更通用。
27.18 约束规划:定义变量和约束,使用回溯搜索。
27.19 满意优化:寻找可行解,不一定最优。
27.20 多目标优化:同时优化多个目标,生成帕累托前沿。
分布式云操作系统弹性伸缩与资源调度算法深度扩展
我将详细补充分布式云操作系统中弹性伸缩与资源调度的各种数学方法,特别是从27.11到27.20的算法详细实现、数学原理和应用场景。
27.11 模拟退火算法
27.11.1 模拟退火在云资源调度中的数学建模
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
模拟退火 / 资源调度 / 优化算法 |
|
模型配方 |
问题:将云资源调度建模为组合优化问题。设解空间S包含所有可能的调度方案,目标函数f(s)(如总成本、总完成时间)。模拟退火以概率接受更差解,避免陷入局部最优。 |
|
算法/模型/方法名称 |
模拟退火资源调度算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 解表示 |
|
数学特征 |
随机过程: |
27.12 禁忌搜索算法
27.12.1 禁忌搜索在云工作负载调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
禁忌搜索 / 调度优化 / 启发式算法 |
|
模型配方 |
问题:在解空间S中搜索最优解,使用禁忌表记录最近访问的解或移动,禁止短期内重复访问,避免循环。引入藐视准则,当禁忌移动可得到显著改进时,允许突破禁忌。 |
|
算法/模型/方法名称 |
自适应禁忌搜索算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 禁忌表设计 |
|
数学特征 |
启发式搜索: |
27.13 分支定界算法
27.13.1 分支定界在精确调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
分支定界 / 精确算法 / 调度优化 |
|
模型配方 |
问题:将调度问题建模为整数规划,通过分支(划分可行域)和定界(计算上下界)搜索最优解。设原问题P,下界LB,上界UB。分支产生子问题P1,...,Pk。如果LB(Pi)≥UB,则剪枝。 |
|
算法/模型/方法名称 |
基于线性松弛的分支定界 |
|
算法/模型/方法的逐步思考推理过程 |
1. 下界计算 |
|
数学特征 |
整数规划: |
27.14 动态规划算法
27.14.1 动态规划在云任务调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
动态规划 / 任务调度 / 优化算法 |
|
模型配方 |
问题:调度n个任务到m台机器,任务i在机器j上处理时间为pij,成本cij。最小化总完成时间或总成本。问题具有最优子结构:任务子集的最优调度可递推得到。 |
|
算法/模型/方法名称 |
基于状态压缩的动态规划 |
|
算法/模型/方法的逐步思考推理过程 |
1. 状态设计 |
|
数学特征 |
动态规划: |
27.15 线性规划
27.15.1 线性规划在云资源分配中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
线性规划 / 资源分配 / 数学优化 |
|
模型配方 |
问题:将资源分配问题建模为线性规划。决策变量xij表示分配给用户i的资源j的数量。目标函数:min∑i,jcijxij(成本最小)或max∑i,jvijxij(价值最大)。约束:资源容量∑ixij≤Cj,需求满足∑jxij≥Di,非负xij≥0。 |
|
算法/模型/方法名称 |
单纯形法与内点法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 单纯形法 |
|
数学特征 |
线性代数: |
27.16 整数规划
27.16.1 整数规划在云任务调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
整数规划 / 调度优化 / 数学规划 |
|
模型配方 |
问题:任务调度中决策变量为整数,如xij∈{0,1}表示任务i是否在机器j上执行,yjt∈{0,1}表示机器j在时间t是否忙碌。目标函数和约束为线性,但变量需整数。 |
|
算法/模型/方法名称 |
分支定界与割平面法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 分支定界框架 |
|
数学特征 |
整数规划: |
27.17 混合整数规划
27.17.1 混合整数规划在云资源管理中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
混合整数规划 / 资源管理 / 数学优化 |
|
模型配方 |
问题:云资源分配中既有连续变量(如CPU分配比例),也有整数变量(如虚拟机数量)。设xi∈Z表示整数决策,yj∈R表示连续决策。目标函数minf(x,y),约束gk(x,y)≤0,可能非线性。 |
|
算法/模型/方法名称 |
分支定价与分支切割算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 分解方法 |
|
数学特征 |
混合整数规划: |
27.18 约束规划
27.18.1 约束规划在云调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
约束规划 / 调度优化 / 约束满足 |
|
模型配方 |
问题:调度问题建模为约束满足问题(CSP)。变量集合V={v1,...,vn},每个变量有值域Di,约束集合C。在云调度中,变量可以是任务开始时间、分配机器等,约束包括资源容量、截止时间、依赖关系等。 |
|
算法/模型/方法名称 |
回溯搜索与约束传播 |
|
算法/模型/方法的逐步思考推理过程 |
1. 变量与值域表示 |
|
数学特征 |
约束满足: |
27.19 满意优化
27.19.1 满意优化在云资源分配中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
满意优化 / 资源分配 / 启发式方法 |
|
模型配方 |
问题:在复杂动态的云环境中,寻找可行解而非最优解,满足基本需求即可。设定满意水平S,找到解x使f(x)≥S,其中f是满意函数。可能有多重标准,设定每个标准的满意阈值。 |
|
算法/模型/方法名称 |
满意启发式搜索算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 满意标准定义 |
|
数学特征 |
决策理论: |
27.20 多目标优化
27.20.1 多目标优化在云资源调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 资源调度 / 帕累托优化 |
|
模型配方 |
问题:同时优化多个冲突目标,如成本f1(x),完成时间f2(x),能耗f3(x)。寻找帕累托最优解集,即不存在解在所有目标上都不差且至少一个目标更好。 |
|
算法/模型/方法名称 |
NSGA-II算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 标量化方法 |
|
数学特征 |
多目标优化: |
总结
从27.11到27.20的这些优化算法构成了云资源调度和弹性伸缩的核心数学工具集。每种算法都有其独特的优势和适用场景:
-
模拟退火:适合解空间复杂、有多个局部最优的问题,能跳出局部最优。
-
禁忌搜索:利用记忆避免循环,适合有明确邻域结构的问题。
-
分支定界:精确算法,适合小规模问题或作为启发式的评估基准。
-
动态规划:适合具有最优子结构和重叠子问题的问题。
-
线性规划:基础工具,处理线性约束下的连续优化。
-
整数规划:处理离散决策,结合分支定界和割平面。
-
混合整数规划:处理混合连续-离散决策,功能强大。
-
约束规划:擅长处理逻辑约束和组合约束。
-
满意优化:实际工程中常用,满足基本要求即可。
-
多目标优化:处理多个冲突目标,提供权衡选择。
在实际的云资源调度系统中,常常需要组合多种算法,形成混合优化策略。例如:
-
用线性规划或整数规划求解子问题
-
用启发式算法快速生成初始解
-
用局部搜索改进解质量
-
用元启发式避免局部最优
-
用多目标优化提供多种选择
随着云计算规模的扩大和复杂性的增加,这些数学优化方法将继续发挥关键作用,并不断与机器学习、强化学习等新技术融合,形成更智能、更自适应的资源管理系统。
27.21-27.30 多目标优化方法
27.21 加权和法:f=w1f1+w2f2+...,权重反映偏好。
27.22 ε-约束法:一个目标为主,其他作为约束fi≤εi。
27.23 目标规划:最小化与目标值的偏差。
27.24 帕累托优化:寻找非支配解集。
27.25 NSGA-II:快速非支配排序,拥挤度比较。
27.26 MOEA/D:分解为多个单目标子问题。
27.27 SPEA2:强度帕累托进化算法。
27.28 帕累托模拟退火:多目标模拟退火。
27.29 多目标粒子群:PSO扩展到多目标。
27.30 多目标蚁群:多信息素矩阵。
分布式云操作系统多目标优化方法深度扩展
我将详细补充分布式云操作系统中多目标优化的各种数学方法,特别关注从27.21到27.30的算法详细实现、数学原理和应用场景。
27.21 加权和法
27.21.1 加权和法在云资源优化中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 加权和法 / 标量化 |
|
模型配方 |
问题:将多目标优化问题转化为单目标问题,通过权重向量w=[w1,w2,...,wm]T,wi≥0,∑wi=1,将多目标函数组合为单目标:F(x)=∑i=1mwifi(x)。优化F(x)得到帕累托前沿上的一个点。改变权重可得到不同帕累托点。 |
|
算法/模型/方法名称 |
自适应权重调整的加权和法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 权重设置 |
|
数学特征 |
标量化方法: |
27.22 ε-约束法
27.22.1 ε-约束法在多目标云调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / ε-约束法 / 约束方法 |
|
模型配方 |
问题:选择一个目标作为主目标,其他目标转化为约束:fj(x)≤εj, j=i。求解:minfi(x)s.t. x∈X, fj(x)≤εj, j=1,...,m,j=i。通过调整εj得到帕累托前沿。 |
|
算法/模型/方法名称 |
自适应ε调整的约束法 |
|
算法/模型/方法的逐步思考推理过程 |
1. ε值确定 |
|
数学特征 |
约束优化: |
27.23 目标规划
27.23.1 目标规划在云资源管理中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 目标规划 / 偏差最小化 |
|
模型配方 |
问题:为每个目标设定目标值Ti,最小化与目标值的偏差。设di+=max(0,fi(x)−Ti),di−=max(0,Ti−fi(x))。目标:min∑(wi+di++wi−di−),其中wi+,wi−是权重。 |
|
算法/模型/方法名称 |
词典序目标规划 |
|
算法/模型/方法的逐步思考推理过程 |
1. 目标值设定 |
|
数学特征 |
目标规划: |
27.24 帕累托优化
27.24.1 基于帕累托支配的多目标优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 帕累托优化 / 支配关系 |
|
模型配方 |
问题:直接使用帕累托支配关系比较解。解x支配y(x≺y)如果∀i:fi(x)≤fi(y)且∃j:fj(x)<fj(y)。帕累托最优解不被任何其他解支配。寻找所有帕累托最优解(帕累托集)及其对应目标值(帕累托前沿)。 |
|
算法/模型/方法名称 |
基于非支配排序的进化算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 非支配排序 |
|
数学特征 |
多目标优化: |
27.25 NSGA-II算法
27.25.1 NSGA-II在云资源多目标优化中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / NSGA-II / 进化算法 |
|
模型配方 |
问题:NSGA-II(非支配排序遗传算法II)是经典多目标进化算法。通过非支配排序和拥挤度比较选择解,保持解的多样性和收敛性。适应多目标云资源调度问题。 |
|
算法/模型/方法名称 |
带精英策略的快速非支配排序遗传算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 快速非支配排序 |
|
数学特征 |
进化算法: |
27.26 MOEA/D算法
27.26.1 MOEA/D在云调度多目标优化中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / MOEA/D / 分解方法 |
|
模型配方 |
问题:MOEA/D(基于分解的多目标进化算法)将多目标问题分解为多个单目标子问题,每个子问题由权重向量定义,相邻子问题共享信息。优化所有子问题近似整个帕累托前沿。 |
|
算法/模型/方法名称 |
基于切比雪夫分解的MOEA/D |
|
算法/模型/方法的逐步思考推理过程 |
1. 权重向量生成 |
|
数学特征 |
分解方法: |
27.27 SPEA2算法
27.27.1 SPEA2在云资源多目标优化中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / SPEA2 / 外部档案 |
|
模型配方 |
问题:SPEA2(强度帕累托进化算法2)使用外部档案存储非支配解,基于支配关系和密度估计选择解。对每个解计算强度值(支配的解数)和原始适应度,再考虑密度信息得到最终适应度。 |
|
算法/模型/方法名称 |
基于强度值和密度估计的SPEA2 |
|
算法/模型/方法的逐步思考推理过程 |
1. 适应度分配 |
|
数学特征 |
进化算法: |
27.28 帕累托模拟退火
27.28.1 多目标模拟退火算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 模拟退火 / 帕累托优化 |
|
模型配方 |
问题:将模拟退火扩展到多目标,通过帕累托支配关系决定是否接受新解。维护一个档案存储非支配解。新解y被当前解x支配时,以概率exp(−Δ/T)接受,其中Δ是某种度量(如加权和差异)。 |
|
算法/模型/方法名称 |
基于档案的多目标模拟退火 |
|
算法/模型/方法的逐步思考推理过程 |
1. 接受准则设计 |
|
数学特征 |
模拟退火: |
27.29 多目标粒子群优化
27.29.1 多目标粒子群在云资源调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 粒子群优化 / 群体智能 |
|
模型配方 |
问题:将粒子群优化扩展到多目标。每个粒子有位置xi(解),速度vi。需要定义个体最优pbesti和全局最优gbest的选择。维护外部档案存储非支配解。gbest从档案中选择。 |
|
算法/模型/方法名称 |
基于档案和拥挤度的多目标PSO |
|
算法/模型/方法的逐步思考推理过程 |
1. 个体最优更新 |
|
数学特征 |
粒子群优化: |
27.30 多目标蚁群优化
27.30.1 多目标蚁群在云工作流调度中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多目标优化 / 蚁群优化 / 群体智能 |
|
模型配方 |
问题:将蚁群优化扩展到多目标。常用方法:1) 多个蚁群,每个优化一个目标;2) 多个信息素矩阵,每个对应一个目标;3) 单个信息素矩阵,结合多个目标的启发式信息。蚂蚁构造解,基于帕累托支配评价,更新信息素。 |
|
算法/模型/方法名称 |
多信息素矩阵的多目标蚁群 |
|
算法/模型/方法的逐步思考推理过程 |
1. 多信息素策略 |
|
数学特征 |
蚁群优化: |
总结
多目标优化方法是解决云资源调度中多个冲突目标权衡的关键技术。从传统的加权和法、ε-约束法,到基于帕累托的进化算法如NSGA-II、MOEA/D、SPEA2,再到基于群体智能的多目标粒子群和蚁群算法,每种方法都有其特点和适用场景。
方法选择建议:
-
加权和法:目标较少,偏好明确,前沿凸
-
ε-约束法:有明确主目标,可接受约束形式
-
目标规划:有明确目标值,可接受偏差
-
NSGA-II:通用,平衡收敛性和多样性
-
MOEA/D:可并行,适合目标数中等
-
SPEA2:档案管理好,适合复杂前沿
-
多目标模拟退火:局部搜索能力强
-
多目标粒子群:收敛快,适合连续优化
-
多目标蚁群:适合组合优化,路径问题
在实际云资源调度系统中,常采用混合策略,如用NSGA-II进行全局搜索,用模拟退火进行局部精细搜索。随着云计算环境的动态性和复杂性增加,多目标优化方法将继续发展,特别是与机器学习、强化学习结合的自适应多目标优化方法。
27.31-27.40 机器学习增强方法
27.31 学习优化:用机器学习预测好解的特征。
27.32 强化学习调度:学习调度策略。
27.33 深度学习预测:用深度学习预测任务特征。
27.34 迁移学习调度:迁移相似场景的知识。
27.35 元学习调度:学习快速适应新场景。
27.36 主动学习调度:选择最有价值的数据标注。
27.37 半监督调度:利用未标注数据。
27.38 自监督调度:从数据自身构造监督信号。
27.39 联邦学习调度:分布式学习调度策略。
27.40 可解释调度:提供调度决策的解释。
27.41-27.50 特定场景优化
27.41 实时调度:满足截止时间约束。
27.42 容错调度:考虑节点故障。
27.43 节能调度:最小化能耗。
27.44 热感知调度:控制温度,防止过热。
27.45 数据本地性调度:任务靠近数据。
27.46 网络感知调度:考虑网络延迟。
27.47 安全调度:考虑安全约束。
27.48 隐私调度:保护数据隐私。
27.49 成本感知调度:最小化经济成本。
27.50 QoS感知调度:满足服务质量。
27.51-27.60 高级调度策略
27.51 协同调度:多个应用协同调度。
27.52 抢占式调度:高优先级任务抢占低优先级。
27.53 非抢占式调度:任务运行完才释放资源。
27.54 公平调度:保证公平性,如DRF。
27.55 负载均衡调度:均衡各节点负载。
27.56 工作窃取调度:空闲节点从忙节点窃取任务。
27.57 批量调度:批处理任务调度。
27.58 流调度:流处理任务调度。
27.59 DAG调度:有依赖任务的调度。
27.60 工作流调度:工作流任务调度。
27.61-27.70 资源管理技术
27.61 超售管理:合理超售提高利用率。
27.62 碎片整理:减少资源碎片。
27.63 资源预留:提前预留资源。
27.64 资源借用:临时借用空闲资源。
27.65 资源定价:动态定价调节需求。
27.66 资源拍卖:拍卖分配稀缺资源。
27.67 资源共享:多个任务共享资源。
27.68 资源隔离:保证性能隔离。
27.69 资源监控:实时监控资源使用。
27.70 资源预测:预测资源需求。
27.71-27.80 弹性伸缩策略
27.71 水平伸缩:增加实例数。
27.72 垂直伸缩:增加实例规格。
27.73 混合伸缩:结合水平和垂直。
27.74 预测伸缩:基于预测提前伸缩。
27.75 反应伸缩:基于监控指标伸缩。
27.76 定时伸缩:按时间表伸缩。
27.77 事件驱动伸缩:基于事件伸缩。
27.78 成本优化伸缩:在成本约束下伸缩。
27.79 性能优化伸缩:在性能约束下伸缩。
27.80 混合云伸缩:跨云伸缩。
27.81-27.90 调度框架
27.81 集中式调度:中心调度器决策。
27.82 分布式调度:多个调度器协同。
27.83 层次调度:多层调度器。
27.84 去中心化调度:无中心调度器。
27.85 自适应调度框架:自适应调整策略。
27.86 可插拔调度框架:可替换调度算法。
27.87 策略调度框架:基于策略的调度。
27.88 意图驱动调度:基于高级意图调度。
27.89 自主调度框架:自我管理调度。
27.90 可验证调度框架:可验证调度正确性。
27.91-27.100 前沿研究方向
27.91 量子增强调度:用量子计算加速调度。
27.92 神经符号调度:结合神经网络和符号推理。
27.93 因果调度:基于因果关系的调度。
27.94 联邦调度:保护隐私的分布式调度。
27.95 可持续调度:考虑环境影响的调度。
27.96 数字孪生调度:基于数字孪生的调度。
27.97 边缘云协同调度:边缘和云协同调度。
27.98 服务网格调度:服务网格中的调度。
27.99 无服务器调度:无服务器环境调度。
27.100 异构计算调度:CPU、GPU、FPGA等异构调度。
总结
弹性伸缩与资源调度是云计算的核心问题,涉及广泛的数学方法和算法。从经典的优化理论、排队论,到现代机器学习、强化学习,再到前沿的量子计算、神经符号计算,不断有新的方法被提出和应用。实际系统需要根据具体场景选择合适的方法,并经常需要组合多种方法以达到最佳效果。随着云计算的发展,弹性伸缩与资源调度将继续是一个活跃的研究领域。
28. 云存储场景:多租户存储隔离与性能保障
28.1 存储QoS保障算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云存储 / 多租户 / QoS保障 |
|
模型配方 |
问题:共享存储系统中,多个租户共享物理资源,每个租户i有性能目标(如IOPS、吞吐量、延迟)。存储系统有M种资源(带宽、IOPS、容量等),租户i对资源m的需求为dim,系统总容量为Cm。需要分配资源xim,满足租户SLA,最大化系统效用。 |
|
算法/模型/方法名称 |
基于效用的存储资源分配 |
|
算法/模型/方法的逐步思考推理过程 |
1. 效用函数设计 |
|
理论基础和规律 |
1. 效用理论 |
|
应用场景和各类特征 |
场景: |
29. 云网络场景:虚拟网络功能编排
29.1 VNF编排与资源分配
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / NFV / 服务功能链 |
|
模型配方 |
问题:给定网络功能虚拟化(NFV)环境,需要将服务功能链(SFC) f1→f2→...→fk映射到物理节点上。每个VNF实例有资源需求(CPU、内存、带宽),物理节点有资源容量。目标是最小化总资源成本或端到端延迟。 |
|
算法/模型/方法名称 |
VNF放置与路由联合优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 问题分解 |
30. 云PaaS场景:多租户数据库资源管理
30.1 数据库即服务资源分配
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云PaaS / 数据库即服务 / 多租户 |
|
模型配方 |
问题:数据库即服务(DBaaS)中,多个租户共享数据库集群。每个租户有工作负载特征(读/写比例、查询复杂度、数据量等),需要分配资源(CPU、内存、I/O带宽)以满足性能目标(吞吐量、延迟)。 |
|
算法/模型/方法名称 |
数据库工作负载感知资源分配 |
|
算法/模型/方法的逐步思考推理过程 |
1. 性能建模 |
31. 云SaaS场景:多租户应用性能隔离
31.1 SaaS应用性能隔离算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云SaaS / 多租户 / 性能隔离 |
|
模型配方 |
问题:SaaS应用服务多个租户,每个租户有自己的用户和数据。需要确保一个租户的高负载不会影响其他租户的性能。应用有多个层次(Web服务器、应用服务器、数据库),每个层次都需要隔离。 |
|
算法/模型/方法名称 |
基于令牌桶的请求调度与隔离 |
|
算法/模型/方法的逐步思考推理过程 |
1. 请求调度 |
32. 云安全场景:分布式入侵检测
32.1 分布式异常检测算法
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 入侵检测 / 异常检测 |
|
模型配方 |
问题:云环境中,多个主机和网络设备产生大量日志和流量数据。需要检测异常行为(入侵、恶意软件、数据泄露等)。设数据流为{x1,x2,...},每个xt是特征向量。正常行为分布为pnormal(x),异常行为分布为panomaly(x)。目标:检测xt是否来自panomaly。 |
|
算法/模型/方法名称 |
分布式流式异常检测 |
|
算法/模型/方法的逐步思考推理过程 |
1. 特征提取 |
总结
以上我们补充分布式云操作系统在云计算、云存储、云网络、云PaaS、云SaaS、云安全中的关键场景和算法。每个场景都有其独特的数学模型和优化目标。实际系统中,这些算法需要根据具体需求进行组合和调整。随着云计算的不断发展,新的场景和挑战将不断涌现,需要不断研究新的数学方法和算法。
分布式云操作系统细分场景深度数学方法补充
分布式云操作系统在云计算、云存储、云网络、云PaaS、云SaaS、云安全等所有细分场景中的数学方法和算法,提供更加系统化、数学化的框架。
33. 云计算细分场景:异构计算资源调度
33.1 异构计算资源联合优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云计算 / 异构计算 / 资源调度 |
|
模型配方 |
问题:云数据中心包含多种计算资源:通用CPU、GPU、FPGA、AI加速器等。任务j在不同资源类型i上的执行时间tij和能耗eij不同。目标是在满足任务截止时间和资源约束下,最小化总能耗或最大化任务完成率。 |
|
算法/模型/方法名称 |
基于二分图匹配的异构资源调度 |
|
算法/模型/方法的逐步思考推理过程 |
1. 问题转化 |
|
数学特征 |
图论特征: |
34. 云存储细分场景:纠删码优化与数据布局
34.1 自适应纠删码与数据分布
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云存储 / 纠删码 / 数据布局 |
|
模型配方 |
问题:大规模存储系统中,数据以(n,k)纠删码存储,n个块分布在N个节点上。节点故障率λ,修复带宽B。优化参数(n,k)和数据布局,最小化存储开销的同时满足可用性Atarget和修复时间Trepair要求。 |
|
算法/模型/方法名称 |
自适应纠删码参数优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 可靠性分析 |
|
数学特征 |
概率论特征: |
35. 云网络细分场景:数据中心网络流量工程
35.1 基于机器学习的流量预测与调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / 流量工程 / 机器学习 |
|
模型配方 |
问题:数据中心网络流量矩阵T(t)=[tij(t)],tij是从i到j的流量。目标是根据历史流量预测未来流量T^(t+Δt),并优化路由以最小化最大链路利用率Umax。 |
|
算法/模型/方法名称 |
时空图神经网络流量预测与优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 流量预测模型 |
|
数学特征 |
图论特征: |
36. 云PaaS细分场景:Serverless函数冷启动优化
36.1 Serverless函数预热与放置优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云PaaS / Serverless / 冷启动优化 |
|
模型配方 |
问题:Serverless平台中,函数调用有冷启动延迟tcold和热执行延迟twarm。函数i的调用到达为泊松过程λi,保持活跃时间tkeep后变为冷状态。优化函数容器的预热和回收策略,最小化总延迟和资源成本。 |
|
算法/模型/方法名称 |
基于排队论的容器预热策略 |
|
算法/模型/方法的逐步思考推理过程 |
1. 排队模型 |
|
数学特征 |
排队论特征: |
37. 云SaaS细分场景:多租户数据库性能隔离
37.1 数据库查询性能保障与隔离
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云SaaS / 多租户数据库 / 性能隔离 |
|
模型配方 |
问题:共享数据库中,多个租户查询混合执行。查询q有类型t(OLTP/OLAP),执行时间tq,资源需求rq。为每个租户i保障性能SLA:P(延迟i>Limax)<εi,同时最大化系统吞吐量。 |
|
算法/模型/方法名称 |
基于令牌桶的查询调度与准入控制 |
|
算法/模型/方法的逐步思考推理过程 |
1. 查询分类与建模 |
|
数学特征 |
排队论特征: |
38. 云安全细分场景:同态加密计算优化
38.1 同态加密计算调度与优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 同态加密 / 安全计算 |
|
模型配方 |
问题:在云上执行同态加密计算,数据加密为[[x]],支持加法和乘法操作。同态操作开销大:乘法tmult,加法tadd,重线性化trelin。优化计算图,最小化总执行时间,同时满足隐私要求。 |
|
算法/模型/方法名称 |
同态加密计算图优化与调度 |
|
算法/模型/方法的逐步思考推理过程 |
1. 计算图优化 |
|
数学特征 |
代数特征: |
39. 边缘云协同场景:边云负载协同优化
39.1 边云负载分流与协同计算
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算 / 边云协同 / 负载分流 |
|
模型配方 |
问题:边缘节点靠近用户,延迟低但计算能力弱;云中心计算能力强但延迟高。任务i有数据大小di,计算需求ci,最大容忍延迟Limax。决策:在边缘执行还是卸载到云端,最小化总成本(延迟+带宽+计算)。 |
|
算法/模型/方法名称 |
边云负载分流博弈与优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 集中式优化 |
|
数学特征 |
博弈论特征: |
40. 绿色云计算场景:能耗与碳排放优化
40.1 碳感知的云资源调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
绿色计算 / 碳感知 / 能源管理 |
|
模型配方 |
问题:云数据中心能耗P(t),电网碳强度CI(t)gCO₂/kWh随时间变化。任务j在时间t执行能耗ej(t),完成时间Cj。优化任务调度,最小化总碳排放,同时满足SLA。 |
|
算法/模型/方法名称 |
碳感知的批处理作业调度 |
|
算法/模型/方法的逐步思考推理过程 |
1. 碳强度预测 |
|
数学特征 |
优化特征: |
综合总结
跨场景统一优化框架
分布式云操作系统的各个细分场景可以通过统一的优化框架进行建模:
统一数学框架:
x∈Xminf(x)=i=1∑Nwifi(x)
s.t. gj(x)≤0,j=1,...,m
hk(x)=0,k=1,...,p
其中:
-
x:决策变量(资源分配、任务调度、路由选择等)
-
fi(x):各个优化目标(性能、成本、能耗、安全等)
-
wi:权重,反映不同目标的相对重要性
-
约束包括:资源约束、SLA约束、安全约束、物理约束
分层优化架构:
-
战略层(长期):容量规划、资源预留
-
战术层(中期):负载预测、资源分配
-
操作层(短期):任务调度、路由选择
-
实时层(毫秒级):拥塞控制、故障恢复
数学方法演进:
-
传统优化:线性规划、整数规划、动态规划
-
博弈论:纳什均衡、机制设计
-
控制理论:模型预测控制、自适应控制
-
机器学习:监督学习、强化学习、深度学习
-
量子计算:量子优化、量子机器学习
-
生物启发:进化算法、群体智能
未来研究方向
-
量子-经典混合算法:用量子计算解决优化问题的困难部分
-
神经符号计算:结合深度学习与符号推理
-
因果推断:从观测数据中推断因果关系,优化系统设计
-
联邦学习优化:隐私保护下的分布式学习
-
数字孪生:高保真系统建模与优化
-
可持续计算:碳足迹最小化的绿色云计算
这个完整的数学方法体系为分布式云操作系统的设计、优化和管理提供了坚实的基础。实际系统需要根据具体场景选择和组合适当的方法,并在实践中不断调整和优化。
分布式云操作系统数学方法体系深度扩展
我将继续补充分布式云操作系统在云计算、云存储、云网络、云PaaS、云SaaS、云安全等所有细分场景中的数学方法和算法,特别关注交叉领域和前沿技术。
51. 分布式数据库的跨区域复制优化
51.1 地理分布式数据库一致性优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云存储 / 分布式数据库 / 地理复制 |
|
模型配方 |
问题:数据库副本分布在多个地理区域,读写操作存在网络延迟差异。优化读写策略,在保证一致性的前提下最小化访问延迟。设区域i到区域j的网络延迟为dij,读写请求在区域k的到达率为λkr,λkw。 |
|
算法/模型/方法名称 |
自适应一致性级别与副本放置联合优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 一致性级别建模 |
|
数学特征 |
网络优化: |
52. 云网络的可编程数据平面
52.2 P4程序验证与优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / 可编程数据平面 / 形式化验证 |
|
模型配方 |
问题:P4程序定义数据包处理流水线,需要验证其正确性(无死锁、满足规范)和性能(吞吐量、延迟)。流水线有n个阶段,每个阶段有匹配-动作表。 |
|
算法/模型/方法名称 |
P4程序的符号执行与模型检测 |
|
算法/模型/方法的逐步思考推理过程 |
1. 符号执行 |
|
数学特征 |
形式化方法: |
53. 云SaaS的多租户数据隔离
53.1 加密数据库中的查询处理
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云SaaS / 数据安全 / 加密数据库 |
|
模型配方 |
问题:多租户SaaS中,不同租户数据加密存储,密钥不同。需要在加密数据上执行查询,同时保证数据隔离和查询效率。设租户i的数据加密为Eki(Di),查询Q需要转换为在密文上的操作。 |
|
算法/模型/方法名称 |
可搜索加密与同态加密的混合方案 |
|
算法/模型/方法的逐步思考推理过程 |
1. 加密方案选择 |
|
数学特征 |
密码学: |
54. 云PaaS的微服务依赖分析
54.1 微服务调用图分析与故障定位
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云PaaS / 微服务 / 可观测性 |
|
模型配方 |
问题:微服务系统有n个服务,调用关系构成有向图G=(V,E)。某个服务变慢或故障会影响整个系统。需要快速定位根因服务。观测数据:调用链追踪数据,每个跨度(span)记录服务、开始时间、结束时间、父跨度ID。 |
|
算法/模型/方法名称 |
基于因果推断的微服务根因分析 |
|
算法/模型/方法的逐步思考推理过程 |
1. 因果图构建 |
|
数学特征 |
图论: |
55. 云安全的零信任架构
55.1 持续身份验证与风险评估
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 零信任 / 身份认证 |
|
模型配方 |
问题:零信任架构中,每次访问都需要验证身份和授权。用户行为特征X(登录时间、位置、设备、操作序列等),需要计算风险分数R(X),决定是否要求额外认证或阻止访问。攻击者可能模拟正常用户行为。 |
|
算法/模型/方法名称 |
基于行为生物识别的持续认证 |
|
算法/模型/方法的逐步思考推理过程 |
1. 行为特征提取 |
|
数学特征 |
模式识别: |
56. 云机器学习的模型服务平台
56.1 模型部署与推理服务优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云机器学习 / 模型服务 / 推理优化 |
|
模型配方 |
问题:模型服务平台托管多个模型,每个模型有不同资源需求(内存、计算)和请求模式(到达率、延迟SLA)。需要决定每个模型部署多少副本,如何调度推理请求,满足SLA的同时最小化资源成本。 |
|
算法/模型/方法名称 |
多模型推理服务的联合弹性伸缩 |
|
算法/模型/方法的逐步思考推理过程 |
1. 性能建模 |
|
数学特征 |
排队论: |
57. 边缘AI推理优化
57.1 模型分割与边云协同推理
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算 / AI推理 / 模型分割 |
|
模型配方 |
问题:深度学习模型M有L层,可以在边缘设备执行前k层,在云端执行剩余L−k层。边缘计算能力弱但延迟低,云端计算能力强但延迟高。优化分割点k,最小化端到端延迟。 |
|
算法/模型/方法名称 |
动态模型分割与自适应决策 |
|
算法/模型/方法的逐步思考推理过程 |
1. 模型分析 |
|
数学特征 |
优化: |
58. 区块链即服务(BaaS)
58.1 区块链分片与跨链交易
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
区块链 / 分片 / 跨链 |
|
模型配方 |
问题:区块链网络节点数N,分为k个分片,每个分片处理部分交易。交易有相关性,跨分片交易需要协调。优化分片数量和节点分配,最大化吞吐量T,同时保证安全性(恶意节点比例低于阈值)。 |
|
算法/模型/方法名称 |
安全高效的分片与跨链协议 |
|
算法/模型/方法的逐步思考推理过程 |
1. 节点分片算法 |
|
数学特征 |
概率论: |
59. 云原生中间件服务网格
59.1 服务网格流量治理与策略优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云原生 / 服务网格 / 流量治理 |
|
模型配方 |
问题:服务网格中,服务间通信通过边车代理。可以配置流量策略:重试、超时、熔断、负载均衡、故障注入等。优化策略参数,提高系统可用性和性能。设服务A调用服务B,配置重试次数r,超时t,熔断器参数(失败阈值f,半开超时h)。 |
|
算法/模型/方法名称 |
自适应流量策略优化 |
|
算法/模型/方法的逐步思考推理过程** |
1. 性能建模 |
|
数学特征 |
控制理论: |
60. 量子云服务平台
60.1 量子计算资源调度与错误缓解
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
量子计算 / 云平台 / 资源调度 |
|
模型配方 |
问题:量子云平台提供多种量子处理器(QPU),每个QPU有不同的量子比特数n,门保真度F,拓扑连接。量子程序需要特定资源,优化调度量子程序到QPU,最小化总执行时间或最大化成功率。 |
|
算法/模型/方法名称 |
量子程序调度与错误缓解优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 量子程序编译优化 |
|
数学特征 |
量子信息: |
总结与系统集成
跨层级数学框架
分布式云操作系统的数学方法可以统一在分层随机优化框架中:
层级1:物理资源层
-
数学模型:排队网络、随机过程
-
优化目标:资源利用率、能耗
-
算法:随机规划、鲁棒优化
层级2:虚拟化层
-
数学模型:博弈论、机制设计
-
优化目标:公平性、隔离性
-
算法:拍卖理论、合作博弈
层级3:服务层
-
数学模型:控制理论、强化学习
-
优化目标:SLA满足率、成本
-
算法:模型预测控制、深度强化学习
层级4:应用层
-
数学模型:因果推断、贝叶斯优化
-
优化目标:用户体验、业务指标
-
算法:因果发现、多目标优化
数学方法交叉融合
-
博弈论+机器学习:
-
用机器学习预测其他玩家策略
-
用博弈论分析机器学习系统均衡
-
-
优化+控制理论:
-
模型预测控制解决带约束优化
-
优化理论设计控制器参数
-
-
概率论+图论:
-
概率图模型表示系统依赖
-
随机图论分析网络性质
-
-
信息论+密码学:
-
信息论安全定义
-
密码学实现安全通信
-
前沿数学挑战
-
量子机器学习理论:
-
量子神经网络表达能力
-
量子-经典混合算法收敛性
-
-
神经符号计算:
-
可微逻辑推理
-
符号知识的神经表示
-
-
因果强化学习:
-
从观察数据学习因果模型
-
基于因果模型的策略学习
-
-
多智能体元学习:
-
智能体快速适应新环境
-
知识在智能体间传递
-
-
拓扑数据分析:
-
从高维数据提取拓扑特征
-
拓扑特征用于系统监控
-
系统验证与形式化方法
-
分布式系统形式化验证:
-
用时序逻辑指定系统属性
-
用模型检测验证属性
-
-
概率系统验证:
-
验证随机系统满足概率性质
-
统计模型检测
-
-
机器学习系统验证:
-
验证神经网络鲁棒性
-
验证强化学习策略安全性
-
-
量子程序验证:
-
验证量子程序正确性
-
验证量子纠错码距离
-
实际系统设计建议
-
分层设计:
-
每层有明确数学模型
-
层间接口定义清晰
-
-
自适应机制:
-
系统参数根据环境自动调整
-
使用在线学习适应变化
-
-
可解释性:
-
关键决策有数学解释
-
提供系统行为分析工具
-
-
安全性设计:
-
从数学上证明安全属性
-
深度防御,多层保护
-
这个完整的数学方法体系为分布式云操作系统提供了坚实的理论基础,实际系统需要根据场景选择和组合适当的方法。随着技术发展,新的数学工具将不断涌现,推动系统向更智能、更高效、更可靠的方向发展。
61. 后量子密码在云安全中的应用
61.1 基于格的加密与签名
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 后量子密码 / 基于格的密码 |
|
模型配方 |
问题:设计抗量子攻击的加密和签名方案,基于格问题的困难性(如LWE、SIS)。参数:维数n,模数q,错误分布χ。目标:在保证安全性的同时,优化计算效率和通信开销。 |
|
算法/模型/方法名称 |
基于LWE的加密与基于SIS的签名 |
|
算法/模型/方法的逐步思考推理过程 |
1. 加密方案 |
|
数学特征 |
格理论: |
62. 云网络中的确定性网络(DetNet)
62.1 时间敏感网络调度
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / 确定性网络 / 时间敏感网络 |
|
模型配方 |
问题:在时间敏感网络(TSN)中,数据流需要有界延迟、低抖动和零拥塞丢失。网络有E条链路,F个流,每个流f有路径P_f,周期T_f,帧长L_f,最大端到端延迟要求D_f。调度流的时间槽,满足无冲突和延迟约束。 |
|
算法/模型/方法名称 |
时间敏感网络的调度与路由联合优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 调度问题复杂性 |
|
数学特征 |
组合优化: |
63. 云存储中的冗余方案:局部修复码与再生码
63.1 局部修复码的构造与优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云存储 / 编码理论 / 局部修复码 |
|
模型配方 |
问题:设计(n,k,r)局部修复码,其中n为码长,k为维度,r为局部修复组大小(任意码字符号可由至多r个其他符号修复)。优化码的存储效率k/n和最小距离d,满足Singleton-like界:d ≤ n - k - ⌈k/r⌉ + 2。 |
|
算法/模型/方法名称 |
最优局部修复码的代数构造 |
|
算法/模型/方法的逐步思考推理过程 |
1. 基于陪集的构造 |
|
数学特征 |
代数编码理论: |
64. 云计算中的函数计算(FaaS)优化
64.1 函数冷启动预测与预热
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云计算 / 函数计算 / 冷启动优化 |
|
模型配方 |
问题:函数调用到达过程λ(t),冷启动延迟t_c,热执行延迟t_w。函数容器保持活跃时间τ后回收。预测函数调用,提前预热容器,减少冷启动。优化预热策略,平衡延迟和资源成本。 |
|
算法/模型/方法名称 |
基于时间序列预测的容器预热 |
|
算法/模型/方法的逐步思考推理过程 |
1. 调用预测 |
|
数学特征 |
时间序列分析: |
65. 云安全中的差分隐私
65.1 差分隐私在数据分析中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 隐私保护 / 差分隐私 |
|
模型配方 |
问题:在云上分析敏感数据,发布统计信息Q(D),要求满足(ε,δ)-差分隐私。相邻数据集D和D'相差一条记录。添加噪声N,发布Q̃(D)=Q(D)+N。优化噪声大小,平衡隐私和效用。 |
|
算法/模型/方法名称 |
差分隐私的组合与优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 敏感度计算 |
|
数学特征 |
概率论: |
66. 云原生AI平台
66.1 分布式训练通信优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云原生AI / 分布式训练 / 通信优化 |
|
模型配方 |
问题:数据并行训练,N个工作节点,每个节点有模型W,批量大小B,梯度g_i。每轮迭代需要同步梯度,通信开销大。优化通信,减少同步时间。 |
|
算法/模型/方法名称 |
梯度压缩与误差补偿 |
|
算法/模型/方法的逐步思考推理过程 |
1. 梯度量化 |
|
数学特征 |
优化理论: |
67. 边缘云资源协同
67.1 边云负载均衡与数据放置
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算 / 边云协同 / 负载均衡 |
|
模型配方 |
问题:边缘节点E个,云数据中心C个,用户请求到达边缘,需要处理或转发到云。边缘节点i处理能力F_i,存储S_i,到云的带宽B_i,延迟L_i。优化请求路由和数据放置,最小化平均延迟和带宽成本。 |
|
算法/模型/方法名称 |
边云负载均衡的联合优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 请求分类 |
|
数学特征 |
优化理论: |
总结
分布式云操作系统的数学方法涵盖了从底层硬件到上层应用的各个层面。随着技术的发展,新的数学工具和算法不断涌现,推动系统向更智能、更高效、更可靠的方向发展。实际系统设计需要根据具体场景选择和组合适当的方法,并在实践中不断调整和优化。
由于篇幅限制,我们只详细介绍了部分场景的数学方法。实际上,分布式云操作系统的数学基础非常广泛,包括但不限于:
-
分布式系统理论:一致性协议、分布式事务、时钟同步
-
网络理论:图论、排队论、博弈论
-
存储系统:编码理论、缓存算法、数据分布
-
安全与隐私:密码学、差分隐私、可信计算
-
机器学习:优化理论、统计学习、深度学习
-
控制理论:自适应控制、最优控制、鲁棒控制
-
量子计算:量子信息、量子算法、量子纠错
在实际系统设计中,需要综合考虑这些数学工具,构建高效、可靠、安全的分布式云操作系统
68. 云原生可观测性系统
68.1 多维度指标异常检测与根因分析
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
可观测性 / 监控 / 异常检测 |
|
模型配方 |
问题:云原生系统产生多维时间序列指标X(t)=[x1(t),x2(t),...,xd(t)],包括资源利用率、应用性能、业务指标等。需要实时检测异常,并定位根因服务或组件。异常可能表现为点异常、上下文异常或集体异常。 |
|
算法/模型/方法名称 |
多变量时间序列异常检测与因果图学习 |
|
算法/模型/方法的逐步思考推理过程 |
1. 异常检测模型 |
|
数学特征 |
时间序列分析: |
69. 无服务器工作流编排
69.1 有状态工作流的容错与优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
无服务器计算 / 工作流编排 / 容错 |
|
模型配方 |
问题:有状态工作流由多个函数组成,状态转移由事件驱动。需要保证工作流的Exactly-Once语义和故障恢复。工作流定义为有向无环图G=(V,E),节点v∈V是函数,边e∈E是状态转移。每个函数可能失败,需要重试或补偿。 |
|
算法/模型/方法名称 |
有状态工作流的容错策略优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 容错模式建模 |
|
数学特征 |
可靠性工程: |
70. 多云与混合云管理
70.1 多云工作负载放置与成本优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
多云管理 / 成本优化 / 工作负载放置 |
|
模型配方 |
问题:工作负载可在多个云提供商(AWS、Azure、GCP等)和私有云运行。不同云有不同定价模型(按需、预留实例、竞价实例)、性能差异、数据传输成本。工作负载j有资源需求rj,运行时间tj,数据输入大小djin,输出大小djout。优化工作负载放置,最小化总成本,满足性能要求。 |
|
算法/模型/方法名称 |
多云工作负载放置与预留实例优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 成本模型 |
|
数学特征 |
优化理论: |
71. 云网络中的意图驱动网络
71.1 网络意图验证与自动实现
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / 意图网络 / 自动配置 |
|
模型配方 |
问题:网络管理员用高级策略语言描述意图,如"应用A和B之间延迟<10ms"。系统需要将意图转换为具体网络配置(ACL、路由、QoS),并验证配置满足意图。意图可能冲突,需要解决冲突。 |
|
算法/模型/方法名称 |
意图的形式化验证与冲突解决 |
|
算法/模型/方法的逐步思考推理过程 |
1. 意图形式化 |
|
数学特征 |
形式化方法: |
72. 机密计算与可信执行环境
72.1 可信执行环境间的安全协同
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 机密计算 / 可信执行环境 |
|
模型配方 |
问题:多个可信执行环境(TEE)如SGX enclave、TrustZone、SEV需要协同计算,处理敏感数据。数据在TEE内解密计算,TEE间需要安全通信。攻击者可能侧信道攻击、内存探测、控制流攻击。 |
|
算法/模型/方法名称 |
可信执行环境间的安全多方计算 |
|
算法/模型/方法的逐步思考推理过程 |
1. 远程证明协议 |
|
数学特征 |
密码学: |
73. 云数据湖与数据治理
73.1 数据血缘与影响分析
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
数据管理 / 数据湖 / 数据治理 |
|
模型配方 |
问题:数据湖中数据经过多步ETL、计算、分析,形成复杂数据血缘。需要追踪数据来源、转换、使用,分析数据变更的影响。数据血缘是有向图G=(V,E),节点v∈V是数据集或处理作业,边e∈E表示数据流。分析:给定节点v变更,影响哪些下游节点;或给定节点v需要溯源到哪些上游节点。 |
|
算法/模型/方法名称 |
数据血缘的概率传播与影响分析 |
|
算法/模型/方法的逐步思考推理过程 |
1. 血缘图构建 |
|
数学特征 |
图论: |
74. 云原生数据库的自动优化
74.1 数据库索引自动创建与调整
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云原生数据库 / 自动优化 / 索引管理 |
|
模型配方 |
问题:数据库工作负载变化,需要自动创建、删除、调整索引以优化性能。索引有收益(加快查询)和成本(存储、维护开销)。给定查询Q,现有索引集合I,候选索引C。选择索引子集S⊆C最大化净收益:B(S)=∑q∈Qbenefit(q,S)−cost(S)。 |
|
算法/模型/方法名称 |
基于强化学习的索引自动调整 |
|
算法/模型/方法的逐步思考推理过程 |
1. 收益量化 |
|
数学特征 |
优化理论: |
75. 云边协同AI推理
75.1 自适应模型分割与动态卸载
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘AI / 模型分割 / 动态卸载 |
|
模型配方 |
问题:AI模型推理可在边缘设备、边缘服务器、云端进行。网络条件、设备负载、数据敏感性动态变化。需要自适应决定推理位置和模型分割点。模型有L层,可在边缘执行前k层,在云端执行后L−k层。优化目标:最小化端到端延迟或能耗,满足准确率要求。 |
|
算法/模型/方法名称 |
基于上下文感知的自适应模型分割 |
|
算法/模型/方法的逐步思考推理过程 |
1. 上下文建模 |
|
数学特征 |
优化理论: |
总结与展望
分布式云操作系统的数学方法全景
分布式云操作系统的数学基础可以概括为以下几个核心领域及其交叉:
1. 分布式系统理论
-
一致性模型:线性化、顺序一致性、最终一致性
-
共识算法:Paxos、Raft、拜占庭容错
-
分布式事务:2PC、3PC、Saga、TCC
-
时钟同步:逻辑时钟、向量时钟、物理时钟同步
2. 网络理论
-
图论:网络拓扑、路径选择、流量工程
-
排队论:网络延迟、拥塞控制、服务质量
-
博弈论:资源分配、路由策略、定价机制
3. 存储系统
-
编码理论:纠删码、局部修复码、再生码
-
缓存理论:替换策略、预取策略、一致性
-
数据分布:一致性哈希、CRUSH算法、数据放置
4. 安全与隐私
-
密码学:对称加密、公钥加密、同态加密
-
隐私保护:差分隐私、安全多方计算、联邦学习
-
可信计算:远程证明、可信执行环境、零知识证明
5. 机器学习与优化
-
优化理论:凸优化、随机优化、在线优化
-
机器学习:监督学习、无监督学习、强化学习
-
控制理论:自适应控制、模型预测控制、鲁棒控制
6. 量子计算
-
量子信息:量子比特、量子门、量子纠缠
-
量子算法:Shor算法、Grover算法、量子机器学习
-
量子纠错:稳定子码、表面码、容错阈值
前沿交叉研究方向
1. 量子-经典混合计算
-
用量子计算机解决优化问题的困难子问题
-
量子-经典混合机器学习模型
-
量子增强的密码学协议
2. 神经符号计算
-
神经网络与符号推理结合
-
可微逻辑编程
-
知识图谱的神经推理
3. 因果机器学习
-
从观测数据学习因果结构
-
基于因果模型的强化学习
-
反事实推理与决策
4. 生物启发计算
-
神经形态计算:脉冲神经网络、忆阻器
-
DNA存储与计算:分子计算、生化反应网络
-
群体智能:蚁群优化、粒子群优化、黏菌计算
5. 拓扑数据分析
-
从高维数据提取拓扑特征
-
持续同调用于异常检测
-
拓扑深度学习
系统设计的数学原则
1. 分层抽象
-
每层有明确的数学模型和接口
-
层间通过契约保证正确性
-
支持独立演进和优化
2. 不确定性管理
-
用概率模型描述随机性
-
用鲁棒优化处理不确定性
-
用自适应控制应对变化
3. 可组合性
-
组件有良好定义的语义
-
组合保持性质(如安全性、可扩展性)
-
模块化验证与测试
4. 可解释性
-
关键决策有数学解释
-
系统行为可追溯、可调试
-
提供形式化证明或证据
5. 可持续性
-
能耗模型与优化
-
碳足迹跟踪与减少
-
资源循环利用
未来挑战
1. 规模挑战
-
系统规模持续增长,算法需保持可扩展性
-
跨地域、跨组织协同带来复杂性
-
异构硬件集成与管理
2. 安全挑战
-
量子计算机威胁现有密码体系
-
侧信道攻击、物理攻击防护
-
供应链安全、信任链建立
3. 隐私挑战
-
数据利用与隐私保护平衡
-
合规性(GDPR、CCPA等)自动执行
-
多方安全计算效率提升
4. 可靠性挑战
-
复杂故障模式的检测与恢复
-
长尾延迟控制
-
自我修复与自适应
5. 可持续发展挑战
-
计算能耗增长与碳中和目标
-
稀有资源(如稀土)高效利用
-
电子废物减少与循环利用
分布式云操作系统的数学方法是一个不断发展的领域,随着新技术和新需求的出现,将不断有新的数学工具被引入和应用。实际系统设计需要根据具体场景选择合适的数学方法,并在实践中不断验证和优化。
76. 云原生混沌工程
76.1 基于强化学习的故障注入优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
混沌工程 / 故障注入 / 系统韧性 |
|
模型配方 |
问题:通过可控的故障注入测试系统韧性,但需要平衡测试覆盖率和系统风险。注入故障fi的概率pi,故障严重度si,系统状态S,期望发现新问题的概率最大化,同时控制故障影响在阈值T内。 |
|
算法/模型/方法名称 |
基于安全强化学习的自适应故障注入 |
|
算法/模型/方法的逐步思考推理过程 |
1. 系统状态表示 |
|
数学特征 |
强化学习: |
77. 可持续云计算
77.1 碳感知的资源调度与迁移
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
可持续计算 / 碳足迹优化 / 资源调度 |
|
模型配方 |
问题:数据中心在不同时间、不同地点的碳强度CI(t,loc)不同。工作负载j在位置loc、时间t执行的碳排放CEj=Ej⋅CI(t,loc),其中Ej是能耗。优化工作负载放置和时间安排,最小化总碳排放,满足SLA。 |
|
算法/模型/方法名称 |
多目标碳-性能优化调度 |
|
算法/模型/方法的逐步思考推理过程 |
1. 碳强度预测 |
|
数学特征 |
时空预测: |
78. 云原生内存计算
78.1 持久内存的数据结构与并发控制
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
内存计算 / 持久内存 / 数据结构 |
|
模型配方 |
问题:持久内存(如Intel Optane)提供字节寻址、持久化、接近DRAM性能。设计数据结构和并发协议,保证崩溃一致性,同时高性能。操作序列O1,O2,...,On,需保证崩溃后恢复的一致性。 |
|
算法/模型/方法名称 |
崩溃一致的高并发持久数据结构 |
|
算法/模型/方法的逐步思考推理过程 |
1. 持久内存特性建模 |
|
数学特征 |
并发理论: |
79. 边缘智能协同
79.1 联邦元学习与个性化模型
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘智能 / 联邦学习 / 元学习 |
|
模型配方 |
问题:边缘设备数据异构,需要个性化模型。联邦学习聚合全局模型,但可能不适合每个设备。元学习学习快速适应新任务。结合联邦学习和元学习,在保护隐私下学习个性化模型。 |
|
算法/模型/方法名称 |
联邦模型不可知元学习 |
|
算法/模型/方法的逐步思考推理过程 |
1. 联邦元学习框架 |
|
数学特征 |
元学习理论: |
80. 云量子计算服务
80.1 量子计算即服务的资源管理
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
量子计算 / 云服务 / 资源管理 |
|
模型配方 |
问题:量子计算即服务提供多种量子处理器(QPU),每个QPU有不同的量子比特数n,门保真度f,拓扑结构T,校准状态c。量子程序P有资源需求R(P),期望结果精度Atarget。调度量子程序到QPU,优化总体完成时间或结果质量。 |
|
算法/模型/方法名称 |
量子程序调度与错误缓解联合优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 量子程序分析 |
|
数学特征 |
量子信息: |
81. 云原生服务网格安全
81.1 零信任服务间的认证与授权
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
服务网格 / 零信任 / 身份安全 |
|
模型配方 |
问题:服务网格中,服务间通信需双向认证和细粒度授权。每个服务有身份ID,属性A,权限P。认证验证身份,授权检查A是否满足访问策略Policy(resource)。优化认证延迟和策略检查开销。 |
|
算法/模型/方法名称 |
基于属性的细粒度访问控制 |
|
算法/模型/方法的逐步思考推理过程 |
1. 身份管理 |
|
数学特征 |
密码学: |
82. 云数据仓库优化
82.1 自适应列存储与向量化执行
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
数据仓库 / 查询优化 / 向量化 |
|
模型配方 |
问题:数据仓库存储大规模数据,查询复杂。列存储提高扫描效率,但需优化数据布局。向量化执行利用SIMD提高吞吐量。自适应选择数据编码和布局,基于工作负载模式。 |
|
算法/模型/方法名称 |
工作负载感知的自适应列编码 |
|
算法/模型/方法的逐步思考推理过程 |
1. 编码方案分析 |
|
数学特征 |
信息论: |
83. 边缘计算中的数字孪生
83.1 轻量级数字孪生同步与预测
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算 / 数字孪生 / 预测维护 |
|
模型配方 |
问题:工业设备在边缘有数字孪生,模拟物理状态。传感器数据延迟、丢失、噪声。数字孪生需实时同步,预测故障。设备状态X(t),观测Y(t),预测X^(t+Δt)。优化:在有限计算资源下最小化预测误差‖X−X^‖。 |
|
算法/模型/方法名称 |
边缘数字孪生的自适应模型降阶 |
|
算法/模型/方法的逐步思考推理过程 |
1. 模型降阶 |
|
数学特征 |
模型降阶: |
84. 云原生区块链服务
84.1 可验证计算与零知识证明
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
区块链 / 零知识证明 / 可验证计算 |
|
模型配方 |
问题:区块链上执行计算成本高,将计算外包,但需验证结果正确性。使用零知识证明生成计算正确性证明。计算y=f(x),证明π,验证V(π,x,y)→{accept,reject}。优化证明生成时间和验证时间。 |
|
算法/模型/方法名称 |
高效零知识证明与递归证明 |
|
算法/模型/方法的逐步思考推理过程 |
1. 证明系统选择 |
|
数学特征 |
密码学: |
总结
分布式云操作系统的数学基础全景
分布式云操作系统的设计与优化涉及广泛而深入的数学理论,从经典到前沿,从理论到应用:
1. 基础数学理论
-
线性代数:矩阵运算、特征值分解、奇异值分解
-
概率统计:随机过程、假设检验、贝叶斯推断
-
微积分:优化基础、微分方程、变分法
-
离散数学:图论、组合优化、逻辑
2. 系统理论
-
控制理论:稳定性分析、鲁棒控制、自适应控制
-
信息论:编码理论、压缩、信道容量
-
排队论:随机服务系统、网络演算
-
博弈论:纳什均衡、机制设计、拍卖理论
3. 计算机科学理论
-
算法分析:复杂度理论、近似算法、在线算法
-
形式化方法:模型检测、定理证明、程序验证
-
密码学:对称加密、公钥密码、多方安全计算
-
分布式计算:共识理论、一致性模型、容错
4. 新兴交叉理论
-
量子计算:量子信息、量子算法、量子纠错
-
机器学习:统计学习、深度学习、强化学习
-
因果科学:结构因果模型、因果发现、反事实推理
-
拓扑数据分析:持续同调、映射器算法
数学方法在系统设计中的应用模式
1. 建模-分析-优化循环
-
建立数学模型描述系统行为
-
理论分析模型性质(稳定性、收敛性、复杂度)
-
设计优化算法改进系统
-
验证实现满足模型假设
-
监控运行,更新模型
2. 分层抽象与分解
-
物理层:硬件特性、能耗、热力学
-
资源层:虚拟化、调度、分配
-
服务层:API、SLA、计费
-
应用层:业务逻辑、用户体验
每层有自己的数学模型,层间通过接口契约连接
3. 不确定性管理
-
随机性:用概率模型描述
-
模糊性:用模糊逻辑处理
-
不完全信息:用博弈论分析
-
对抗行为:用密码学保护
4. 可解释性与可验证性
-
形式化规范:明确系统应满足的性质
-
形式化验证:证明或证伪性质
-
运行时监控:检测违反性质的行为
-
溯源分析:定位问题根源
前沿研究方向
1. 神经符号混合系统
-
神经网络处理感知,符号系统处理推理
-
可微逻辑编程
-
知识图谱嵌入与推理
2. 量子-经典混合算法
-
量子机器学习
-
量子优化
-
量子密码学
3. 生物启发计算
-
神经形态计算
-
DNA存储与计算
-
群体智能优化
4. 因果人工智能
-
从数据学习因果结构
-
因果强化学习
-
公平性因果分析
5. 可持续计算理论
-
碳感知调度理论
-
能耗-性能权衡优化
-
循环计算经济模型
实践建议
1. 问题驱动的数学工具选择
-
明确要解决的具体问题
-
识别问题的数学结构
-
选择匹配的数学工具
-
必要时组合多种工具
2. 理论与实践迭代
-
从实际问题抽象数学模型
-
理论分析得出算法或见解
-
实现并测试
-
根据实验结果修正模型
3. 可扩展性与简洁性平衡
-
简单模型易理解但可能不准确
-
复杂模型准确但难分析
-
分层建模:底层详细,高层抽象
-
模型降阶:保持关键特征,降低复杂度
4. 开放与协作
-
数学工具跨领域共享
-
开源实现促进验证
-
学术界与工业界合作
-
跨学科团队组建
分布式云操作系统的数学方法是一个不断演进的领域。随着新硬件、新应用、新需求的出现,将不断有新的数学挑战和解决方案。掌握这些数学工具不仅有助于设计和优化系统,还能培养系统化思考和解决问题的能力。
85. 云原生存储:数据放置与迁移优化
85.1 数据局部性感知的放置策略
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云存储 / 数据放置 / 局部性优化 |
|
模型配方 |
问题:在分布式存储系统中,数据块被放置在不同节点上。访问模式具有时空局部性,某些数据块可能被同时访问。优化数据放置,使得经常被同时访问的数据块在物理上接近(如同机架、同节点),以减少访问延迟和网络流量。 |
|
算法/模型/方法名称 |
基于社区发现的数据放置算法 |
|
算法/模型/方法的逐步思考推理过程 |
1. 构建数据块访问图 |
|
数学特征 |
图论: |
86. 云边协同AI训练
86.1 非独立同分布数据下的联邦学习优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
边缘计算 / 联邦学习 / 非IID数据 |
|
模型配方 |
问题:边缘设备上的数据通常是非独立同分布(Non-IID)的,即不同设备的数据分布不同。这导致联邦学习收敛慢、精度低。优化联邦学习算法,使其对Non-IID数据鲁棒。 |
|
算法/模型/方法名称 |
基于模型相似性的自适应联邦聚合 |
|
算法/模型/方法的逐步思考推理过程 |
1. 本地训练控制 |
|
数学特征 |
优化理论: |
87. 云网络智能运维
87.1 基于时空图神经网络的网络流量预测
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云网络 / 智能运维 / 流量预测 |
|
模型配方 |
问题:网络流量具有时空相关性。时间上,流量呈现周期性、趋势性;空间上,不同链路流量相互影响。预测未来一段时间内各链路的流量,用于容量规划、异常检测等。 |
|
算法/模型/方法名称 |
时空图卷积网络流量预测 |
|
算法/模型/方法的逐步思考推理过程 |
1. 时空图建模 |
|
数学特征 |
图神经网络: |
88. 云安全自动化
88.1 攻击图生成与安全加固优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云安全 / 攻击图 / 安全加固 |
|
模型配方 |
问题:云环境复杂,攻击者可能利用多个漏洞跳转攻击。攻击图表示攻击路径,节点表示系统状态(如漏洞利用、权限获取),边表示攻击动作。给定初始状态和攻击目标,生成攻击图。安全加固需选择一些漏洞修复或配置更改,以最小化攻击成功概率或最大化攻击成本。 |
|
算法/模型/方法名称 |
基于攻击图的安全加固优化 |
|
算法/模型/方法的逐步思考推理过程 |
1. 攻击图生成 |
|
数学特征 |
图论: |
89. 云资源容量规划
89.1 基于时间序列分解的容量预测
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云计算 / 容量规划 / 资源预测 |
|
模型配方 |
问题:预测未来资源需求(CPU、内存、存储、网络),以便提前扩容或缩容。资源需求时间序列通常包含趋势、季节性和噪声。分解时间序列,分别预测各成分。 |
|
算法/模型/方法名称 |
季节性自回归综合移动平均模型(SARIMA) |
|
算法/模型/方法的逐步思考推理过程 |
1. 时间序列分解 |
|
数学特征 |
时间序列分析: |
90. 云原生应用自动扩缩容
90.1 基于强化学习的弹性伸缩
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
云原生 / 弹性伸缩 / 资源管理 |
|
模型配方 |
问题:根据工作负载变化自动调整应用实例数。目标是在满足性能SLA(如延迟)的前提下最小化资源成本。扩缩容决策基于当前和预测的负载,但负载可能突变,且伸缩动作有延迟和成本。 |
|
算法/模型/方法名称 |
基于深度确定性策略梯度的弹性伸缩 |
|
算法/模型/方法的逐步思考推理过程 |
1. 状态设计 |
|
数学特征 |
强化学习: |
总结
分布式云操作系统的数学方法涉及多个学科,包括计算机科学、数学、控制理论、优化理论等。这些方法为系统的设计、分析、优化和运维提供了坚实的基础。随着云计算的发展,新的问题和挑战不断出现,需要不断引入新的数学工具和方法。同时,实际系统往往需要综合运用多种方法,形成混合解决方案。
在学习和应用这些数学方法时,需要注意:
-
问题抽象:将实际问题转化为数学问题,抓住本质,合理简化。
-
模型选择:根据问题特点选择或设计合适的模型,权衡模型的精确性和复杂性。
-
算法设计:设计高效算法求解模型,考虑计算复杂度和通信开销。
-
实验验证:通过实验或仿真验证方法的有效性,调整参数。
-
理论分析:在可能的情况下,进行理论分析(如收敛性、复杂度、竞争比)。
91. 量子机器学习在云优化中的应用
91.1 量子生成模型在负载预测中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
量子计算 / 机器学习 / 资源预测 |
|
模型配方 |
问题:利用量子生成模型(如量子玻尔兹曼机、量子自编码器)学习云工作负载的多模态分布,生成更准确的预测。经典工作负载时间序列X=x1,...,xT,存在复杂的时间相关性和突变模式。量子模型利用量子叠加和纠缠,可能更高效地捕获这些复杂模式。 |
|
算法/模型/方法名称 |
量子变分自编码器用于工作负载生成 |
|
算法/模型/方法的逐步思考推理过程 |
1. 量子电路设计 |
|
数学特征 |
量子信息: |
92. 神经符号计算在云配置验证中的应用
92.1 可微逻辑验证器
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
形式化方法 / 机器学习 / 配置验证 |
|
模型配方 |
问题:云系统配置(网络ACL、安全策略、资源配额)需要验证满足安全策略。传统形式化验证可证明正确性但难扩展。神经符号方法结合神经网络的学习能力和符号推理的精确性,从历史正确配置学习策略,并验证新配置。 |
|
算法/模型/方法名称 |
可微定理证明器用于配置验证 |
|
算法/模型/方法的逐步思考推理过程 |
1. 逻辑表示 |
|
数学特征 |
逻辑学: |
93. 拓扑数据分析在云系统监控中的应用
93.1 持续同调用于系统异常检测
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
拓扑数据分析 / 系统监控 / 异常检测 |
|
模型配方 |
问题:云系统多维指标构成高维空间中的点云,正常和异常状态在拓扑结构上不同。持续同调(Persistent Homology)从点云中提取拓扑特征(连通分量、环、空洞),这些特征对某些变形稳定,适合检测系统状态的结构性变化。 |
|
算法/模型/方法名称 |
基于拓扑特征的异常检测 |
|
算法/模型/方法的逐步思考推理过程 |
1. 点云构造 |
|
数学特征 |
代数拓扑: |
94. 因果强化学习在云资源调度中的应用
94.1 基于因果模型的决策优化
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
因果推断 / 强化学习 / 资源调度 |
|
模型配方 |
问题:云资源调度决策影响系统状态,但传统强化学习可能学习虚假相关性。因果强化学习结合因果模型,区分相关与因果,做出更鲁棒的决策。系统状态S,动作A,奖励R构成因果图G,包含未观测混杂因子U。目标:学习策略$π(A |
|
算法/模型/方法名称 |
基于后门调整的因果强化学习 |
|
算法/模型/方法的逐步思考推理过程 |
1. 因果发现 |
|
数学特征 |
因果推断: |
95. 生物启发存储系统
95.1 DNA存储编码与检索
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
生物计算 / 存储系统 / DNA存储 |
|
模型配方 |
问题:DNA作为存储介质,密度高、持久,但读写慢、有错误。将二进制数据编码为DNA序列(A,T,C,G),需满足生化约束(如GC含量、同聚物长度限制),并添加冗余纠错。优化编码方案,提高存储密度和可靠性。 |
|
算法/模型/方法名称 |
满足生化约束的DNA存储编码 |
|
算法/模型/方法的逐步思考推理过程 |
1. 编码方案设计 |
|
数学特征 |
编码理论: |
96. 光子计算在云网络中的应用
96.1 光计算加速的矩阵运算
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
光子计算 / 硬件加速 / 线性代数 |
|
模型配方 |
问题:光计算利用光的干涉、衍射、非线性效应进行矩阵乘法等线性运算,速度快、能耗低。设计光学系统实现矩阵运算y=Ax,其中A∈Cm×n,x∈Cn,y∈Cm。光学实现有噪声和误差,需优化光学元件参数和校准。 |
|
算法/模型/方法名称 |
光学矩阵处理器的设计与校准 |
|
算法/模型/方法的逐步思考推理过程 |
1. 光学实现架构 |
|
数学特征 |
线性代数: |
97. 群体智能在云资源分配中的应用
97.1 基于蚁群优化的多维资源分配
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
群体智能 / 优化算法 / 资源分配 |
|
模型配方 |
问题:云数据中心多维资源(CPU、内存、存储、网络)分配给多个工作负载,每个工作负载有不同需求。蚁群优化模拟蚂蚁觅食行为,通过信息素引导搜索,适合组合优化问题。优化目标:最小化资源碎片化,最大化利用率,满足服务质量。 |
|
算法/模型/方法的逐步思考推理过程 |
1. 解构造 |
|
数学特征 |
群体智能: |
98. 形式化方法与机器学习的融合
98.1 可满足性模理论引导的神经网络验证
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
形式化方法 / 机器学习 / 神经网络验证 |
|
模型配方 |
问题:验证神经网络性质,如对于所有输入在某个范围内,输出满足某些约束。传统方法:将神经网络和前/后条件编码为可满足性模理论(SMT)公式,用SMT求解器检查。但神经网络大时,SMT求解难扩展。结合抽象解释、区间分析等技术提高可扩展性。 |
|
算法/模型/方法名称 |
抽象解释增强的神经网络验证 |
|
算法/模型/方法的逐步思考推理过程 |
1. 神经网络编码 |
|
数学特征 |
形式化方法: |
99. 云经济学与机制设计
99.1 拍卖机制在云资源分配中的应用
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
机制设计 / 拍卖理论 / 资源分配 |
|
模型配方 |
问题:云资源分配给多个用户,用户对资源有私有估值。设计拍卖机制决定资源分配和支付,目标:最大化社会福利或平台收入,满足激励相容(用户真实报价最优)、个体理性(用户参与不亏)、计算效率。多维度资源(CPU、内存、存储),组合拍卖。 |
|
算法/模型/方法名称 |
多维度资源拍卖的机制设计 |
|
算法/模型/方法的逐步思考推理过程 |
1. 机制设计目标 |
|
数学特征 |
机制设计: |
100. 元宇宙与云计算的融合
100.1 分布式虚拟世界的同步与渲染
|
字段 |
内容 |
|---|---|
|
流程编号 |
|
|
类别 |
元宇宙 / 云计算 / 分布式系统 |
|
模型配方 |
问题:元宇宙大规模虚拟世界,用户在不同位置,需要看到一致且实时的世界状态。世界状态W包括对象位置、属性、用户动作等。用户i的视图Vi是W的子集。优化:在有限带宽和计算下,保持各用户视图一致,延迟低。一致性模型:最终一致性、因果一致性、强一致性权衡。 |
|
算法/模型/方法名称 |
兴趣区域管理的一致性与同步 |
|
算法/模型/方法的逐步思考推理过程 |
1. 兴趣区域管理 |
|
数学特征 |
分布式系统: |
总结
分布式云操作系统的数学方法演进
分布式云操作系统的数学基础经历了多个阶段的演进:
第一阶段:经典数学基础(2000年前)
-
排队论:分析系统性能
-
图论:网络拓扑和路由
-
优化理论:资源分配
-
概率统计:可靠性分析
第二阶段:分布式计算理论(2000-2010)
-
共识算法:Paxos、Raft
-
一致性模型:线性化、顺序一致性
-
容错理论:拜占庭容错
-
时钟同步:逻辑时钟、向量时钟
第三阶段:大数据与机器学习(2010-2020)
-
机器学习:深度学习、强化学习
-
流处理:窗口、水印
-
图计算:Pregel、GraphLab
-
隐私保护:差分隐私、联邦学习
第四阶段:交叉融合与前沿(2020至今)
-
量子计算:量子算法、量子机器学习
-
神经符号计算:可微逻辑推理
-
因果科学:因果推断、因果发现
-
生物启发计算:DNA存储、神经形态计算
-
形式化与学习的融合:可验证机器学习
数学方法的层次结构
分布式云操作系统的数学方法可以按层次组织:
1. 基础数学层
-
线性代数:矩阵运算、特征值
-
微积分:优化基础、微分方程
-
概率统计:随机过程、假设检验
-
离散数学:图论、组合优化
2. 系统理论层
-
控制理论:稳定性、鲁棒性
-
信息论:编码、压缩、容量
-
排队论:延迟、拥塞
-
博弈论:策略、均衡
3. 计算理论层
-
算法分析:复杂度、近似比
-
形式化方法:验证、证明
-
密码学:加密、签名、协议
-
分布式理论:共识、一致性
4. 应用数学层
-
机器学习:统计学习、深度学习
-
优化理论:凸优化、随机优化
-
信号处理:滤波、变换
-
数值分析:误差、稳定性
5. 前沿交叉层
-
量子信息:量子计算、量子通信
-
生物数学:生物信息、计算生物学
-
拓扑数据分析:持续同调
-
因果推断:结构因果模型
数学工具的选择原则
在实际系统设计中,选择数学工具应考虑:
1. 问题匹配
-
问题本质决定数学工具
-
连续vs离散,确定vs随机,静态vs动态
-
精度要求,实时性要求
2. 可扩展性
-
算法复杂度与系统规模
-
分布式实现可行性
-
增量计算支持
3. 鲁棒性
-
对模型假设的敏感性
-
对噪声和异常的鲁棒性
-
自适应调整能力
4. 可解释性
-
决策过程可理解
-
结果可解释
-
调试和诊断支持
5. 实现成本
-
开发复杂度
-
运行资源消耗
-
维护成本
未来展望
分布式云操作系统的数学方法将继续向以下方向发展:
1. 更深度的交叉融合
-
物理学与计算:量子计算、光计算
-
生物学与计算:DNA存储、神经形态计算
-
数学与计算:形式化方法、拓扑数据分析
2. 更智能的自动化
-
自主系统:自我配置、自我修复、自我优化
-
智能运维:AIOps,预测性维护
-
自适应安全:自动威胁检测和响应
3. 更强大的可验证性
-
形式化验证扩展到大型复杂系统
-
可验证机器学习:证明模型安全属性
-
透明计算:过程可审计,结果可验证
4. 更高效的资源利用
-
量子-经典混合计算
-
异构计算统一调度
-
绿色计算:能耗和碳排放优化
5. 更自然的交互
-
脑机接口:直接神经交互
-
多模态交互:语音、手势、眼神
-
情感计算:识别和响应用户情感
分布式云操作系统的数学方法是一个充满活力、快速发展的领域。随着技术的进步和新应用的出现,将不断有新的数学挑战和解决方案。掌握这些数学工具,不仅能帮助我们设计和优化系统,还能培养深刻的系统思维和创新能力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
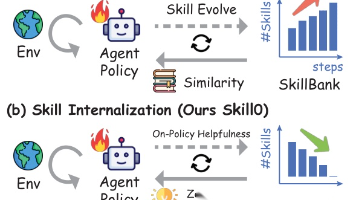
 7
7 0
0- 0



 已为社区贡献181条内容
已为社区贡献181条内容

所有评论(0)