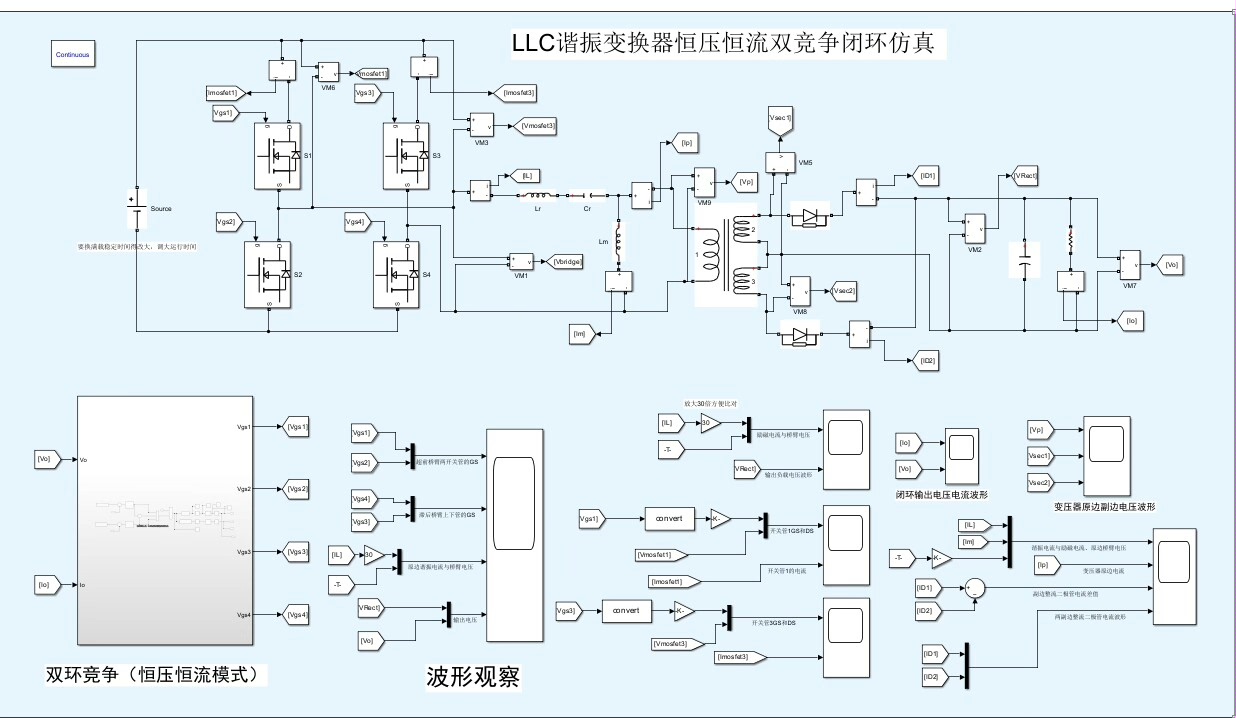
LLC谐振变换器的双环竞争控制实战
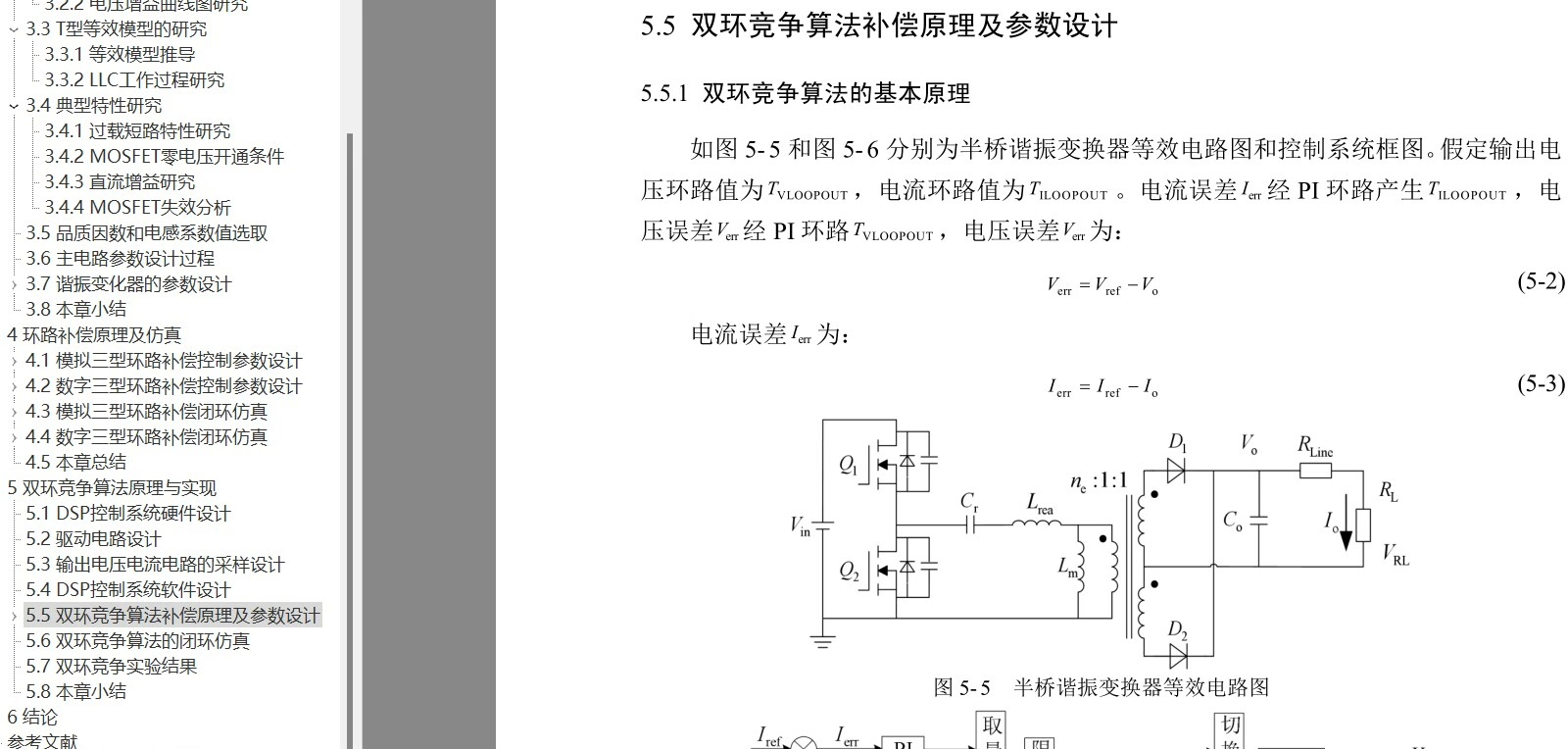
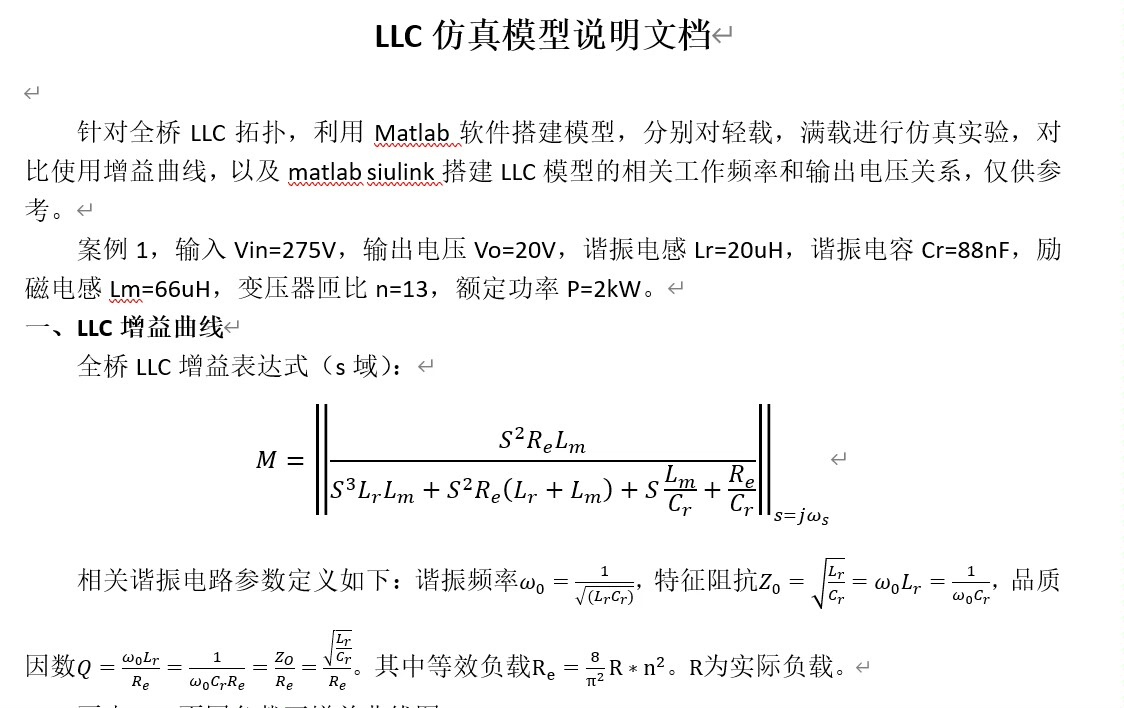
MATLAB/Simulink LLC谐振变换器恒压恒流双竞争闭环仿真模型 附说明文档和参考文献 仿真参数: 输入Vin=325V,输出电压Vo=20V,谐振电感Lr=20uH,谐振电容Cr=88nF,励磁电感Lm=66uH,变压器匝比n=13,额定功率P=2kW 采用电压电流双环竞争控制(恒压恒流),附双环竞争仿真文件(内含仿真介绍,波形分析,增益曲线计算.m代码)。 参考文献:《_基于半桥谐振变换器的控制策略研究》不是复现,就是参考这篇文献的双竞争闭环算法的思路搭建的,控制上是一样。
最近在搞一个LLC谐振变换器的仿真项目,核心需求是实现恒压恒流双环竞争控制。这种控制策略在充电桩、电源适配器中很常见——设备需要在恒压(CV)和恒流(CC)模式间自动切换。下面直接上干货,分享我的Simulink建模过程和几个关键代码片段。
一、模型参数与谐振腔设计
硬件参数直接决定谐振频率特性:
Vin = 325; % 输入直流电压
Vo = 20; % 目标输出电压
Lr = 20e-6; % 谐振电感
Cr = 88e-9; % 谐振电容
Lm = 66e-6; % 励磁电感
n = 13; % 变压器匝比计算谐振频率时发现个坑:实际谐振频率不止由Lr和Cr决定,还得考虑Lm的影响。用下面这段代码验证:
fr = 1/(2*pi*sqrt(Lr*Cr)) % 纯谐振频率
f_actual = 1/(2*pi*sqrt((Lr+Lm)*Cr)) % 实际工作频率输出结果分别是38.6kHz和28.3kHz,说明Lm的存在会显著拉低工作频率。这解释了为什么实际调试时频率总比理论值低——硬件参数必须测准!
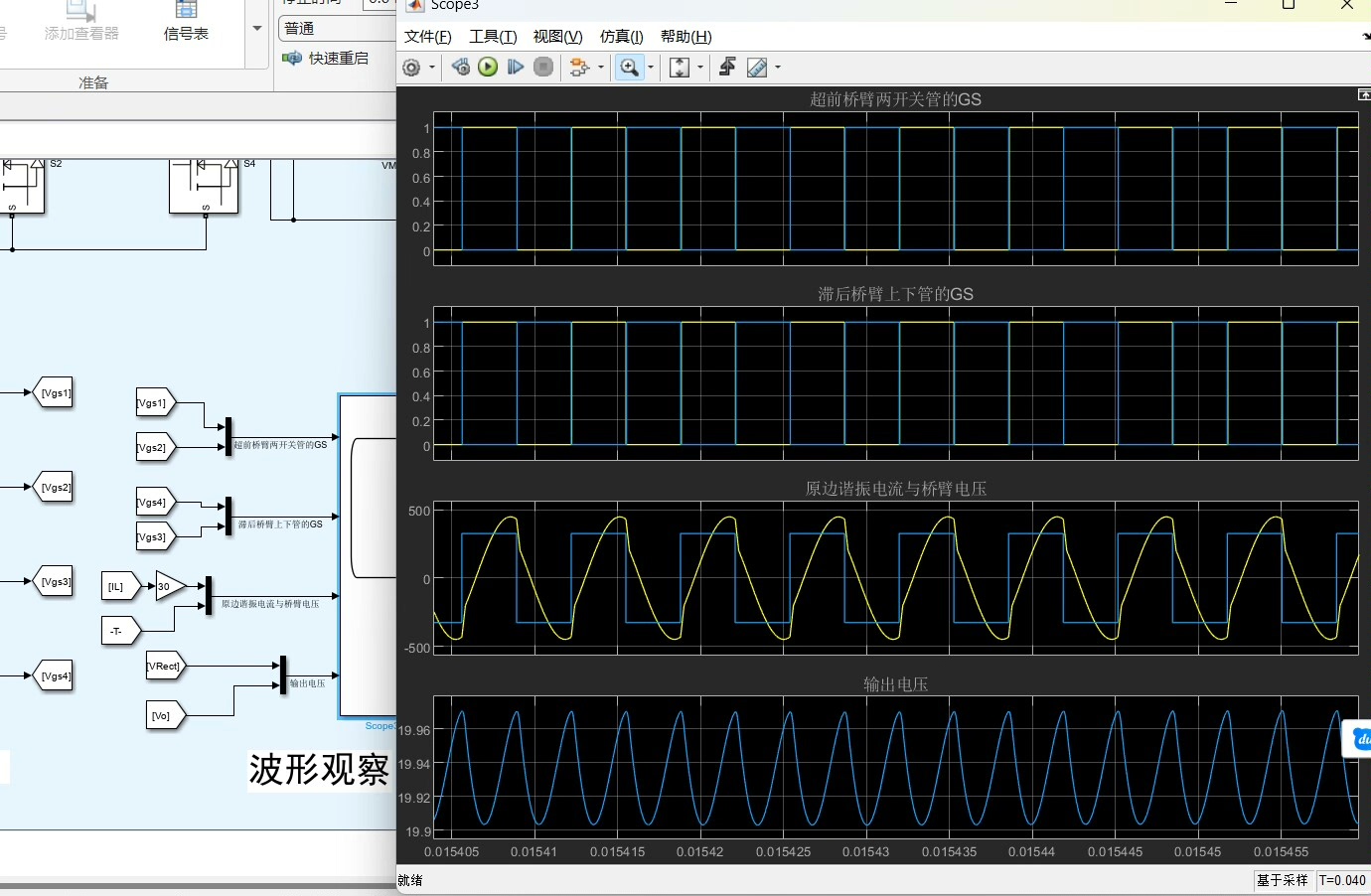
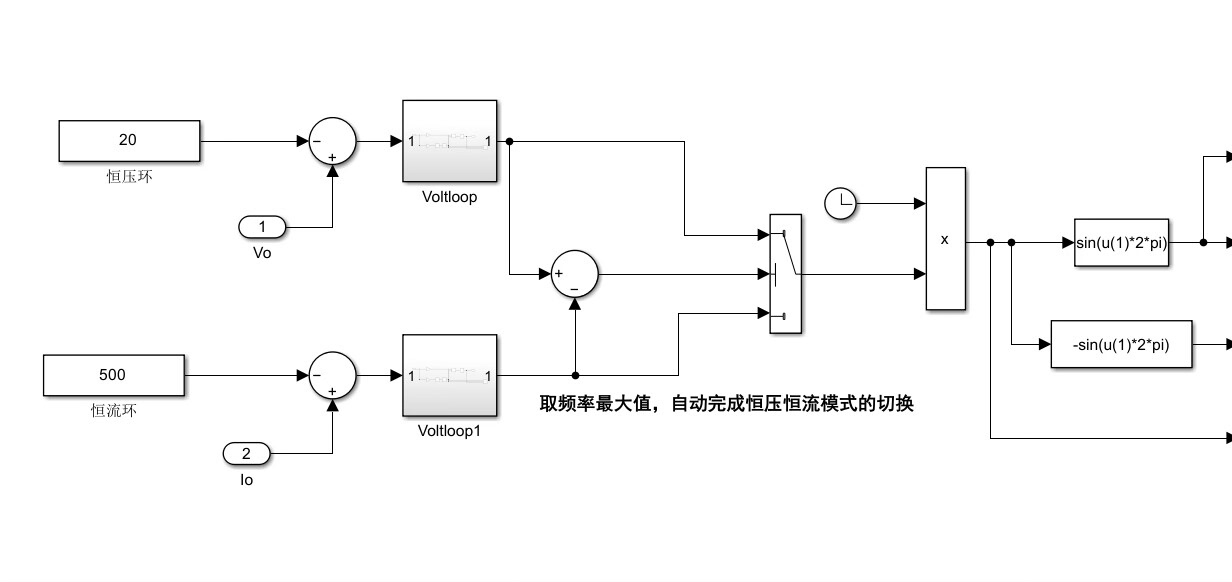
二、双环竞争控制的实现
核心思路:电压环和电流环的输出通过最小值选择器竞争。当负载电流超过设定阈值时,系统自动切换到恒流模式。
在Simulink中搭建控制环时,注意两个细节:
- 电压环PI参数:先用Ziegler-Nichols法粗调,再根据阶跃响应微调
Kp_v = 0.05; % 比例系数
Ki_v = 1200; % 积分系数- 电流环抗饱和:在积分器上加clamping模块,防止启动过冲
MATLAB/Simulink LLC谐振变换器恒压恒流双竞争闭环仿真模型 附说明文档和参考文献 仿真参数: 输入Vin=325V,输出电压Vo=20V,谐振电感Lr=20uH,谐振电容Cr=88nF,励磁电感Lm=66uH,变压器匝比n=13,额定功率P=2kW 采用电压电流双环竞争控制(恒压恒流),附双环竞争仿真文件(内含仿真介绍,波形分析,增益曲线计算.m代码)。 参考文献:《_基于半桥谐振变换器的控制策略研究》不是复现,就是参考这篇文献的双竞争闭环算法的思路搭建的,控制上是一样。
实测发现,模式切换时的抖动主要来自PI输出突变。解决方法是在选择器后增加一阶惯性环节,时间常数设为开关周期的3-5倍。
三、增益曲线分析代码
谐振变换器的增益特性直接影响环路稳定性。用MATLAB扫频法绘制增益曲线:
f_sw = logspace(4,5,500); % 10kHz-100kHz扫频
Gain = zeros(size(f_sw));
for i = 1:length(f_sw)
[mag,~] = calculate_gain(f_sw(i), Lr, Cr, Lm, n);
Gain(i) = mag;
end
semilogx(f_sw, Gain);
xlabel('频率(Hz)'); ylabel('增益');这段代码跑出的曲线显示,在28kHz附近出现增益峰值(约1.8倍)。这解释了为什么闭环控制时频率不能低于25kHz——否则会进入非线性区导致震荡。
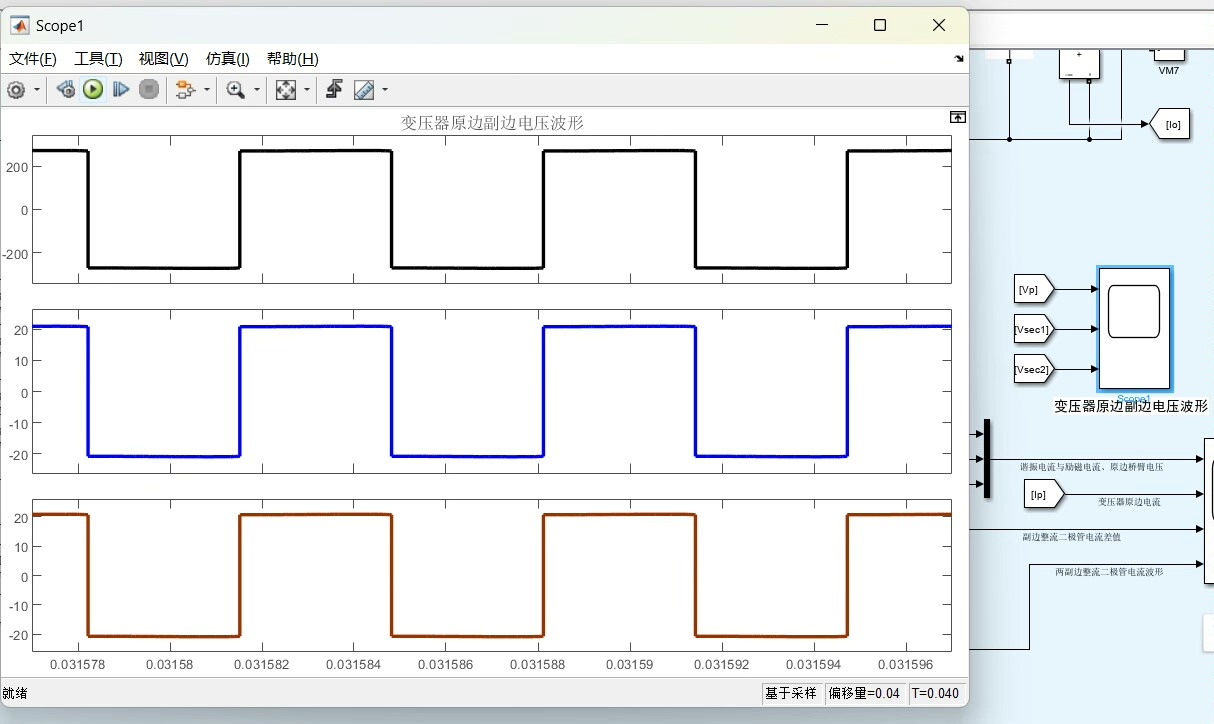
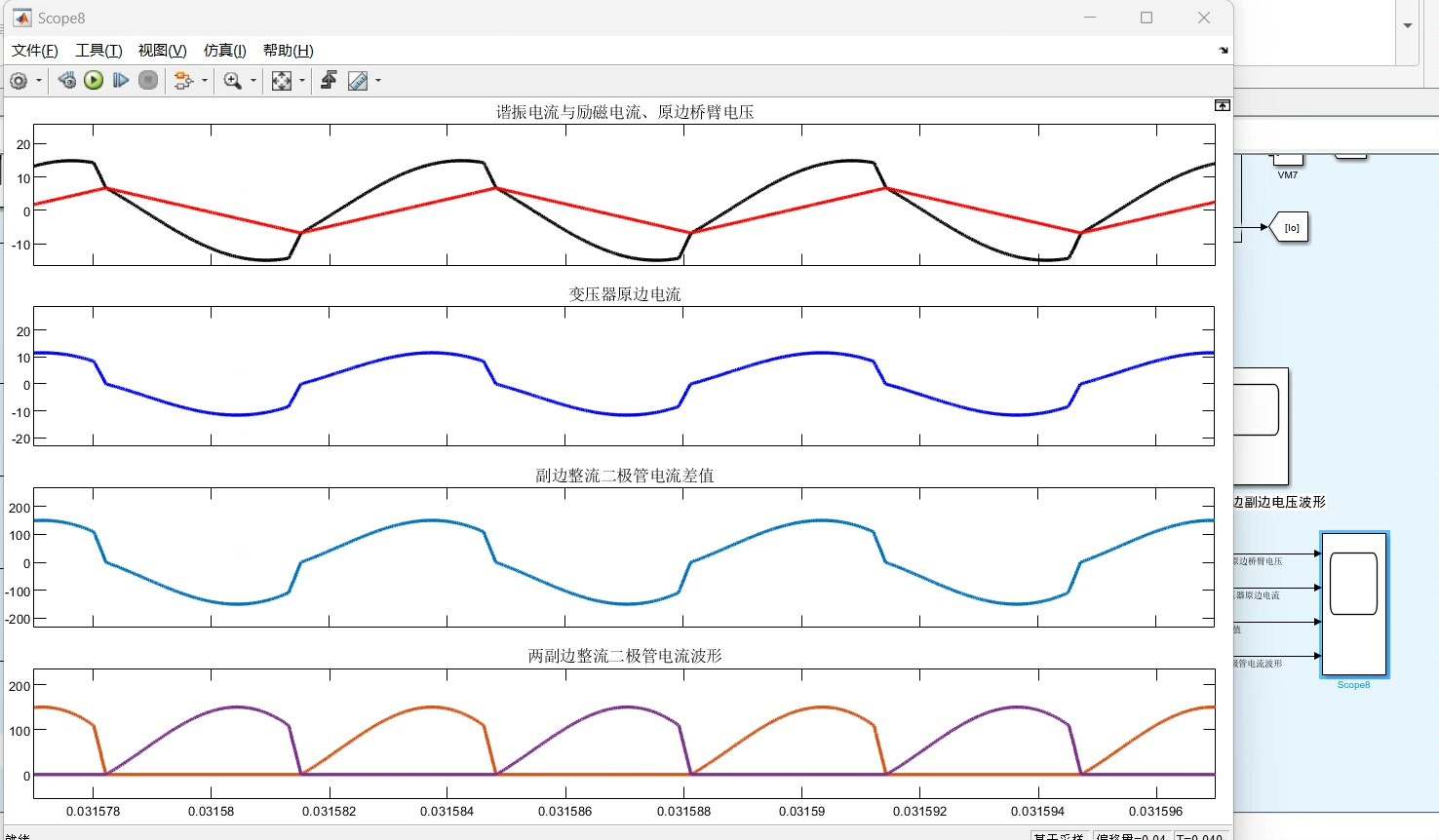
四、仿真波形解读
关键测试场景:负载从50%突增到100%时观察模式切换:
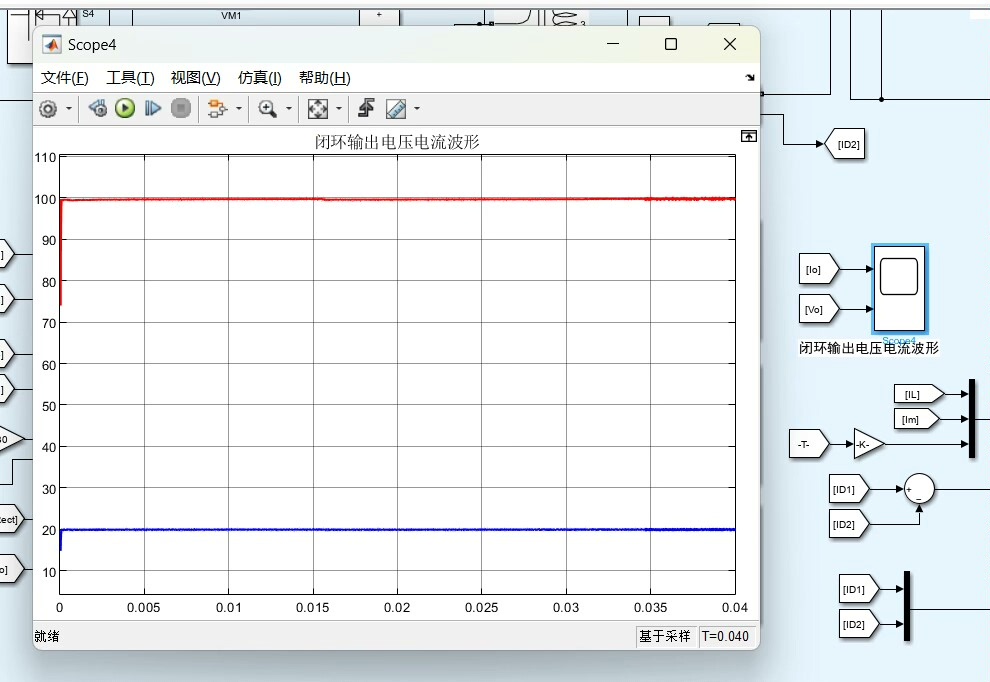
- 恒压模式:Vo稳定在20±0.3V,谐振电流呈完美正弦
- 切恒流瞬间:输出电流在2ms内完成调节,但电压出现0.5V跌落
- 恢复过程:PI控制器的积分项积累导致超调量约4%
一个实战经验:把电流环的积分时间设为电压环的1/2,可以加快模式切换响应。但要注意,过快的响应会导致高频噪声被放大。
五、参数敏感度测试
当Lm偏差±10%时:
- 谐振频率偏移约±7%
- 峰值增益变化达±15%
- 但双环控制仍能保持输出电压稳定
这说明LLC拓扑对参数变化有较强鲁棒性,但前提是控制环带宽足够。建议在实际项目中,对磁性元件留出±15%的设计余量。
后记
这个模型已经跑了上百次仿真,最大的感悟是:谐振变换器的控制就像骑自行车,太快会失控,太慢会倒,找到那个“滑得刚刚好”的频率点才是关键。完整仿真文件和参考文献已打包,评论区自取。下期可能会聊聊数字控制实现中的过零检测难题——那又是另一个深坑了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)