多车编队自适应协同控制:基于滑膜控制的奇妙之旅
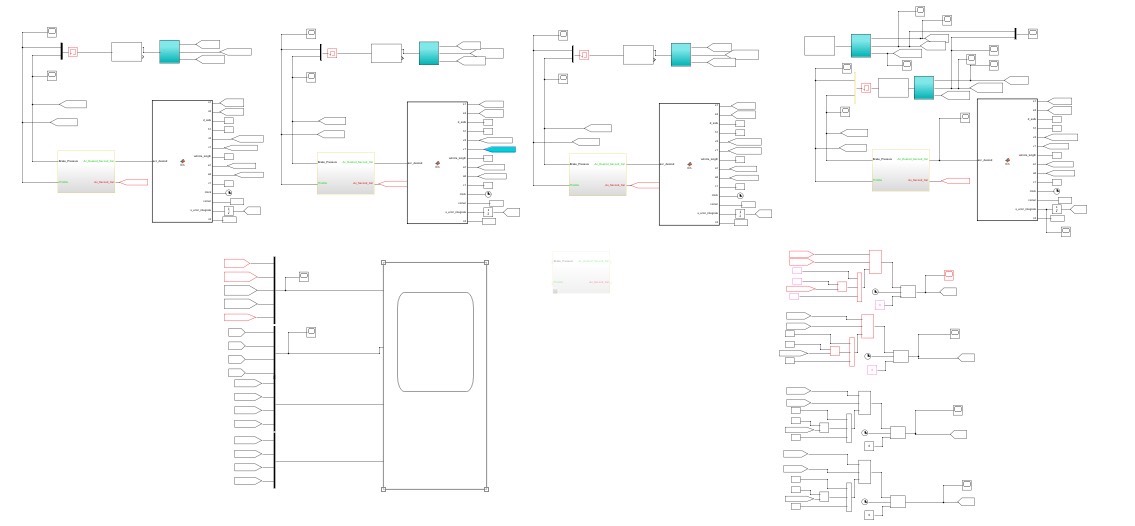
21-多车编队自适应协同控制 通过考虑前车的加速度和距离,实现ACC自适应协同控制的多车编队(5辆车),达到自适应巡航控制,并在carsim/Simulink仿真平台上进行模拟。 该算法结构分为两层:上层是滑膜控制器,用于生成期望的加速度;下层则通过调节节气门开度和刹车制动压力来控制车速。 在仿真中,输出以下数据: 1. 5辆车的前车与后车之间的跟踪误差; 2. 5辆车的车速变化; 3. 4辆车的节气门和制动压力的变化。 基于滑膜控制的效果非常好,不亚于模型预测控制(MPC) 此外,该方法在实车试验中也十分方便。 所提供的文件包括ACC巡航建模资料和滑膜控制的详细资料,其中还包括滑膜控制的总结,对于学习滑膜控制有一定帮助。
在智能交通领域,多车编队自适应协同控制一直是个热门话题。今天咱就来唠唠通过考虑前车加速度和距离,实现ACC自适应协同控制的5辆车编队,这可是能达到自适应巡航控制的酷炫操作,还在carsim/Simulink仿真平台上进行模拟哦。
算法结构探秘
这算法结构分为两层,就像盖房子,上层是滑膜控制器,负责生成期望的加速度。怎么理解呢?就好比给车设定一个“小目标加速度”。
% 简单示意滑膜控制器生成期望加速度的代码
function desired_acc = sliding_mode_controller(state, reference)
% state 包含车辆当前状态信息,如速度、与前车距离等
% reference 是期望的状态参考值
k1 = 0.5; % 控制参数
k2 = 0.3; % 控制参数
s = k1 * (reference - state(1)) + k2 * (0 - state(2)); % 滑模面
desired_acc = -sign(s); % 根据滑模面确定期望加速度
end在这段代码里,我们根据车辆当前状态state和期望参考值reference计算出滑模面s,然后根据滑模面的符号来确定期望加速度desired_acc。这就是滑膜控制器在计算期望加速度时的大致思路啦。
下层呢,则通过调节节气门开度和刹车制动压力来控制车速。这就像是车的“手脚”,根据上层给的“指令”(期望加速度),通过调整节气门开度和刹车制动压力,让车真的按照期望的速度跑起来。
仿真输出大揭秘
在仿真过程中,会输出好多有用的数据呢。
- 5辆车的前车与后车之间的跟踪误差:这个数据很关键,它能告诉我们后车跟上前车跟得有多“准”。跟踪误差越小,说明车辆编队的协同性越好。
- 5辆车的车速变化:车速变化曲线就像车辆的“心电图”,能反映出车辆在行驶过程中的速度调整情况,看看是不是按照我们期望的自适应巡航在跑。
- 4辆车的节气门和制动压力的变化:这能直观展示下层控制是怎么工作的,什么时候该踩“油门”(节气门开度变化),什么时候该踩“刹车”(制动压力变化)。
滑膜控制效果杠杠的
基于滑膜控制的效果那是相当不错,可不亚于模型预测控制(MPC)。滑膜控制简单直接,就像程咬金的三板斧,虽然招式不复杂,但效果拔群。它能快速响应车辆状态变化,让车辆在编队行驶中保持稳定。

21-多车编队自适应协同控制 通过考虑前车的加速度和距离,实现ACC自适应协同控制的多车编队(5辆车),达到自适应巡航控制,并在carsim/Simulink仿真平台上进行模拟。 该算法结构分为两层:上层是滑膜控制器,用于生成期望的加速度;下层则通过调节节气门开度和刹车制动压力来控制车速。 在仿真中,输出以下数据: 1. 5辆车的前车与后车之间的跟踪误差; 2. 5辆车的车速变化; 3. 4辆车的节气门和制动压力的变化。 基于滑膜控制的效果非常好,不亚于模型预测控制(MPC) 此外,该方法在实车试验中也十分方便。 所提供的文件包括ACC巡航建模资料和滑膜控制的详细资料,其中还包括滑膜控制的总结,对于学习滑膜控制有一定帮助。
而且呀,这个方法在实车试验中也特别方便。不用搞得特别复杂,就能让车在实际道路上实现编队协同控制。
学习资料大放送
这次还提供了ACC巡航建模资料和滑膜控制的详细资料,里面还有滑膜控制的总结呢,对于想学习滑膜控制的小伙伴来说,那可是相当有帮助。就像给你一把打开滑膜控制知识宝库的钥匙,让你能更轻松地探索这个有趣的领域。
总之,多车编队自适应协同控制基于滑膜控制的这种方法,无论是在理论仿真还是实际应用上,都展现出了很大的潜力,未来说不定在智能交通里能大放异彩呢!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)