大模型后训练强化学习策略全解(非常详细),In-Context Learning机制从入门到精通,收藏这一篇就够了!
后训练中的两种不同策略PPO、GRPO都是什么来更好地理解RL,并且引出如果不走参数更新是否可能实现类似RL的优化效果——In-Context Learning(ICL)能力的涌现,为我们理解模型如何“利用反馈”提供了另一个窗口。
一、后训练(Post-training)中,RL 一般用哪些策略?
后训练阶段的核心目标,是将一个大模型的行为对齐到特定的人类偏好或任务目标上。这与预训练“拟合数据分布”的目标有本质不同。在这个过程中,强化学习提供了一套成熟的方法论框架。
1. 为什么在后训练阶段引入 RL?
在大模型完成预训练(Pretraining)后,模型已经具备了基本的语言能力、世界知识以及初步的推理模式。但模型能力与人类期望之间仍然存在显著差距:
- “知道” ≠ “会按人类期望回答”:模型可能掌握知识,但表达方式、详略程度或价值取向未必符合预期。
-
模型输出可能存在 冗余、跑题、不安全、或超出可控范围 的问题。
-
对“好坏回答”的判断,往往是 偏好型、相对型 的,难以获得标准、明确的监督信号。
因此,后训练阶段的目标便转向 重塑模型的生成策略分布(policy),使其更符合人类偏好与任务目标。这正是强化学习(RL)擅长的范畴——通过奖励信号来调整策略。
2. 后训练中常见的 RL 策略类型
(1)基于 Actor-Critic 框架的经典方法:PPO
Proximal Policy Optimization(PPO)是 RLHF(基于人类反馈的强化学习)中最早且应用最广的方法。其核心思想是将语言模型本身视为一个策略(policy),通过一个奖励模型(reward model)对输出打分,再利用价值函数(value function)作为基准,通过梯度更新策略,并在更新幅度上使用裁剪(clipping)机制以防止策略突变。
经典的 PPO 目标函数引入了裁剪区间
在传统强化学习中,这种设计能有效稳定训练。
核心思想:
-
将 LLM 视为 policy
-
用 reward model 打分
-
用 value function 作为 baseline
-
通过 clipping 限制策略更新幅度
我们先忽略一切复杂性,只看一个标量:
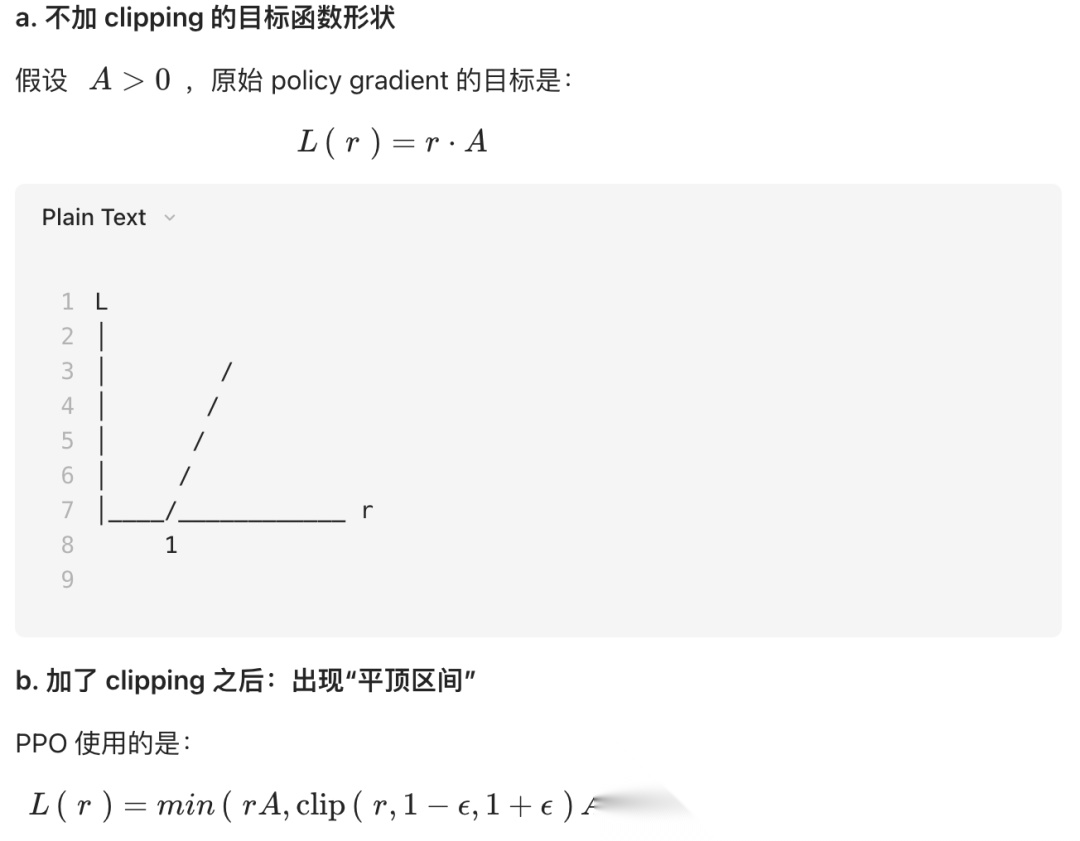
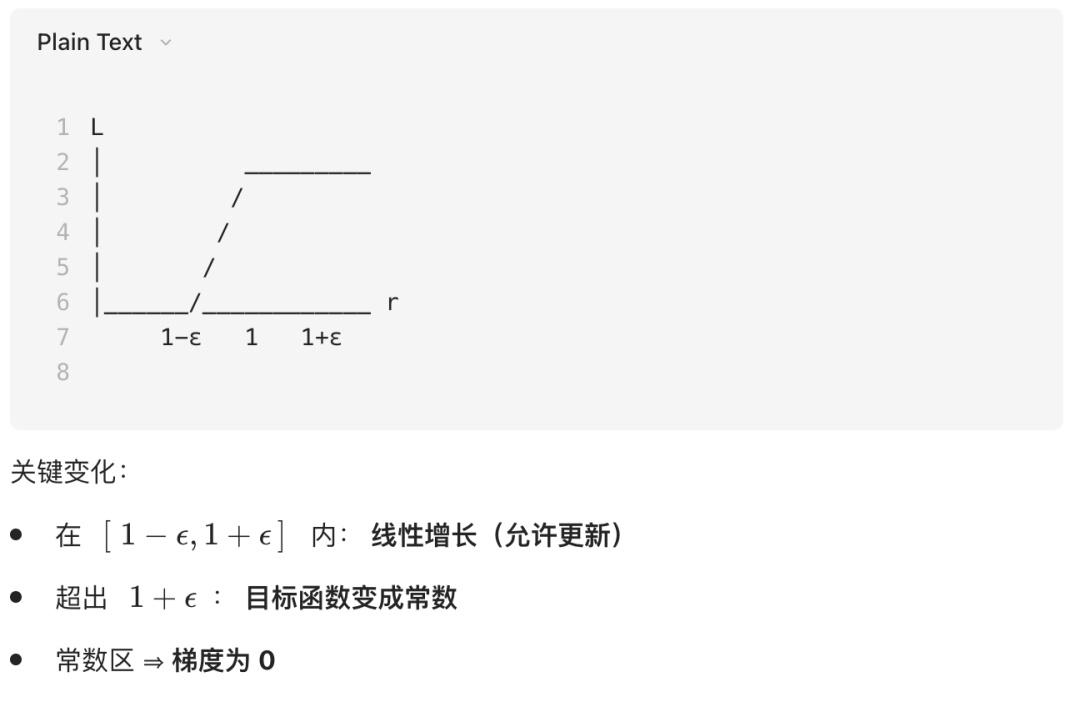
这就是 clipping 的几何本质:在 ratio 空间里人为造了一个“平坦平台(plateau)”,防止策略沿着一个方向无限滑下去。优点:理论成熟,在传统 RL 和早期 RLHF 中效果稳定。
然而,将 PPO 直接应用于大语言模型对齐任务时,其理论假设与现实存在错位,导致诸多局限:
- 对价值模型(value model)依赖过强,训练不稳定
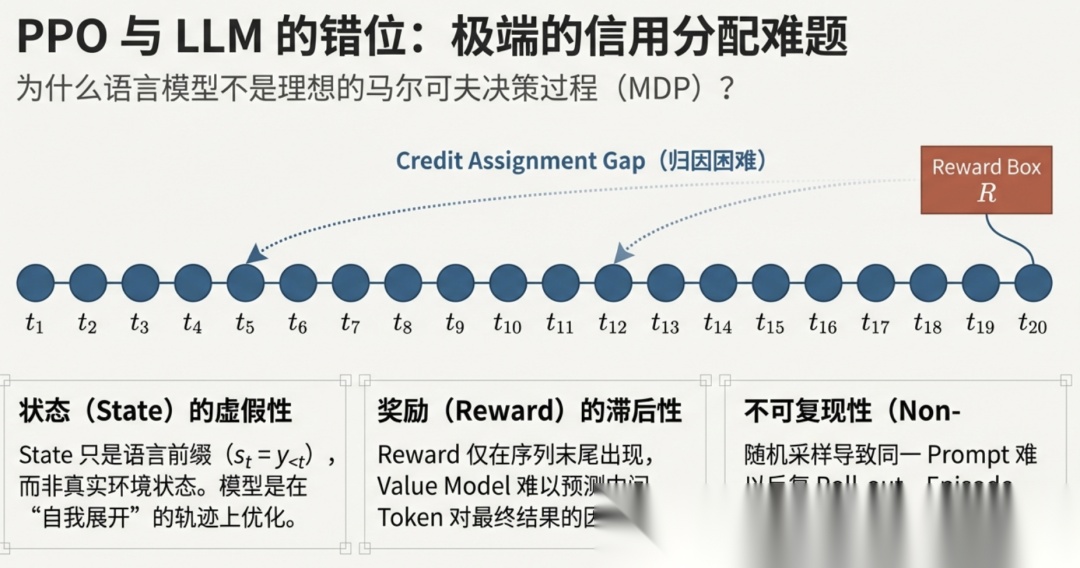
Value 要预测的是“未来 token 的整体好坏”,但在 LLM 中:reward 往往只在 序列末尾,value 却要对****中间 token 估值。
这本质是一个 极端 credit assignment 问题:
“你现在多生成了一个‘因为’,会不会导致 30 个 token 之后的回答更受人类喜欢?”
value model 很难学到这种因果结构。
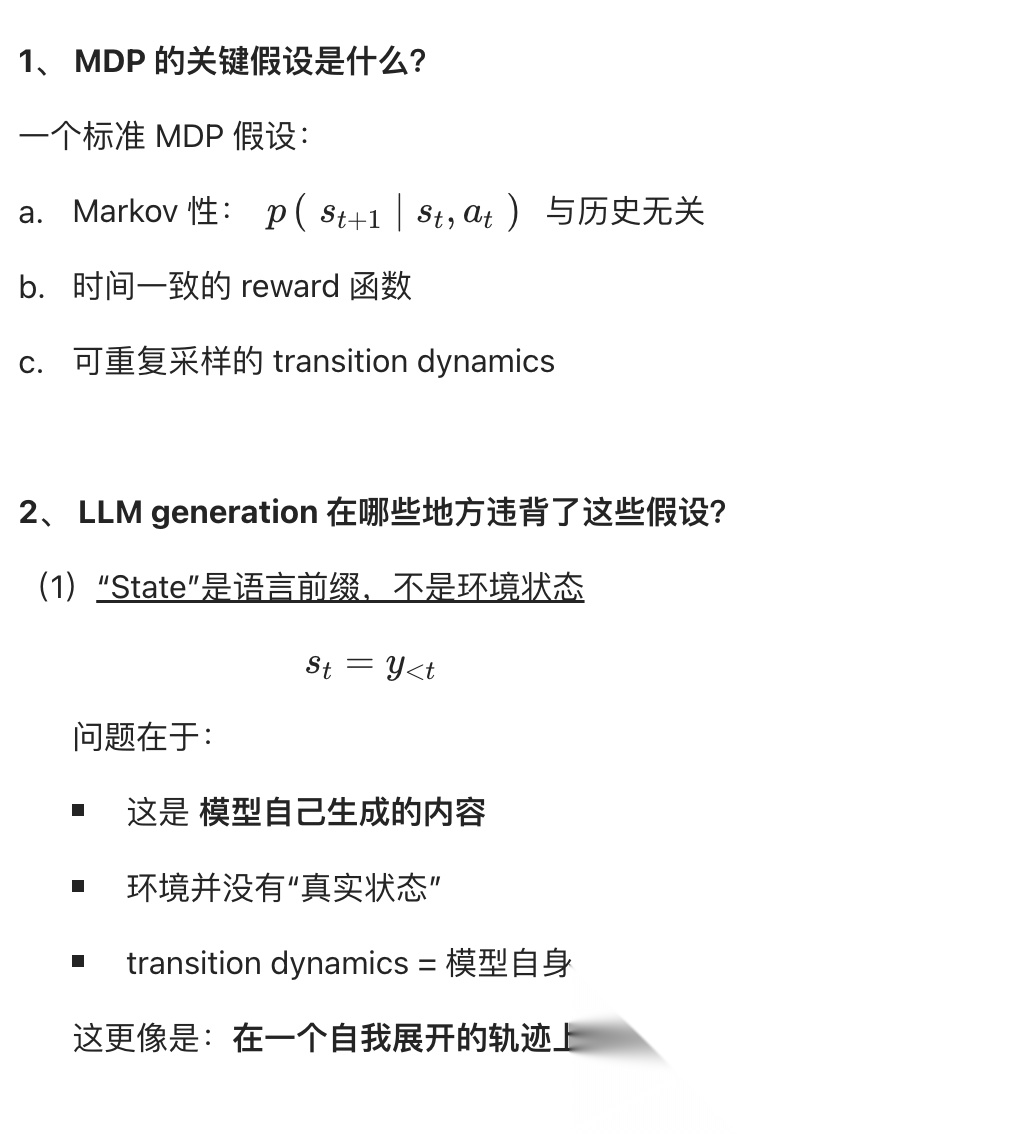
- 经典马尔可夫决策过程(MDP)假设部分失效
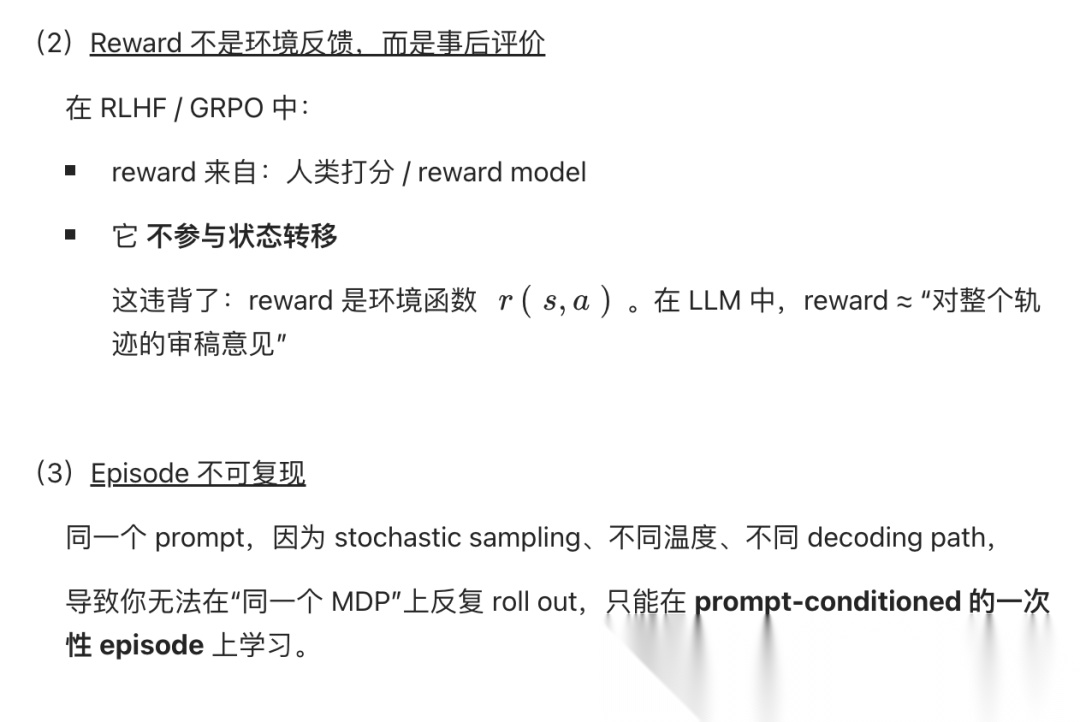
在语言生成中,所谓的“状态”是已生成的语言前缀(模型自身输出的历史),而非环境提供的真实状态;奖励也并非环境的即时反馈,而是对完整轨迹的事后评估;同时,同一条件下的生成轨迹由于随机性往往不可复现。
所以,PPO 在 LLM 中运行,并不是因为 LLM 是 MDP,而是因为 PPO 对“非 MDP 问题”具有一定鲁棒性。
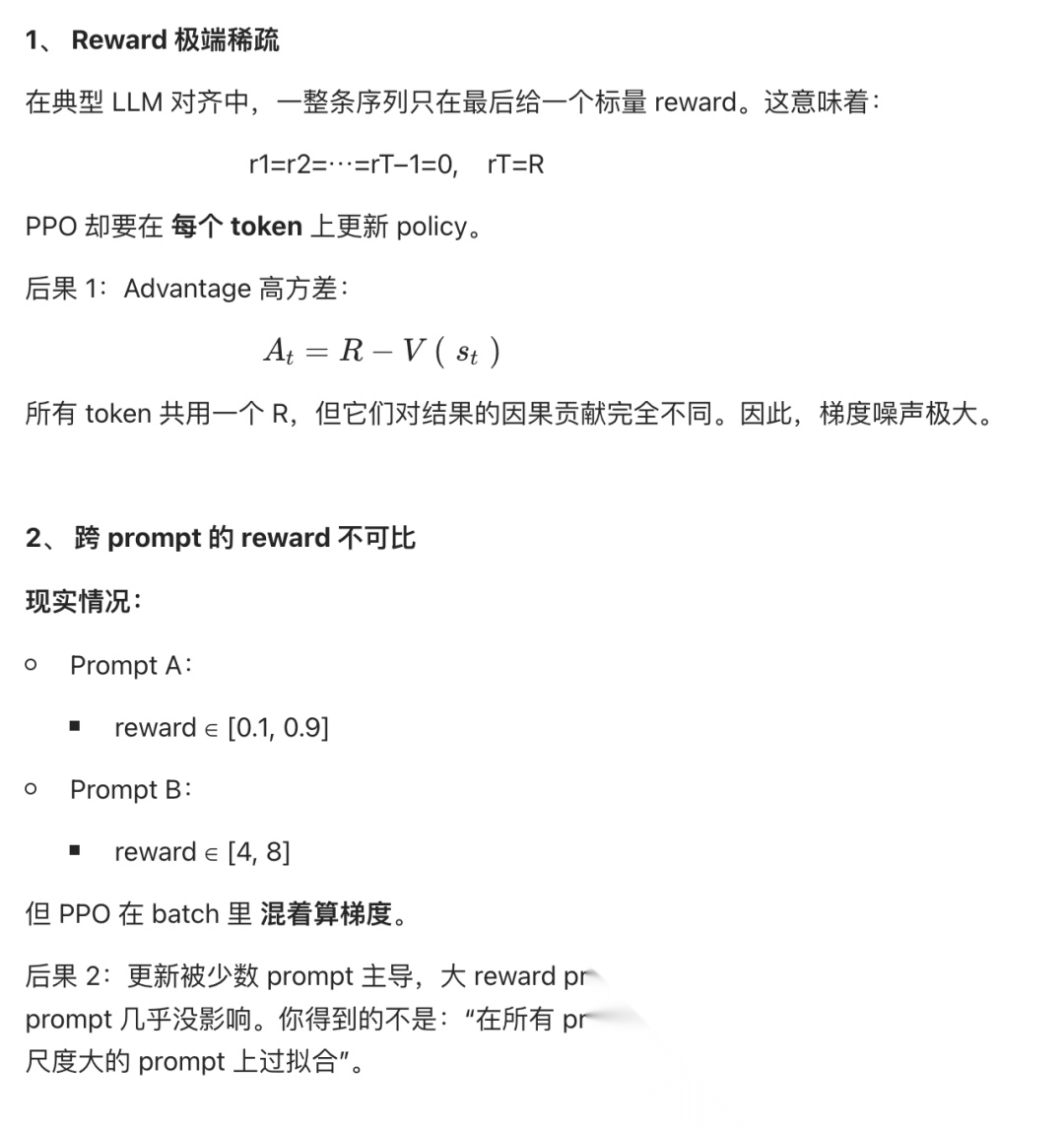
- 奖励稀疏且跨提示(prompt)尺度不一致
这会导致优势估计方差巨大,且模型更新易被少数高奖励数据主导,而非在所有提示上都获得均衡优化。
简言之,PPO 在 LLM 对齐中仍被使用,更多是依靠其对非理想 MDP 问题的经验性鲁棒性,但其内在局限性正促使研究转向更简洁、更稳定的方法。
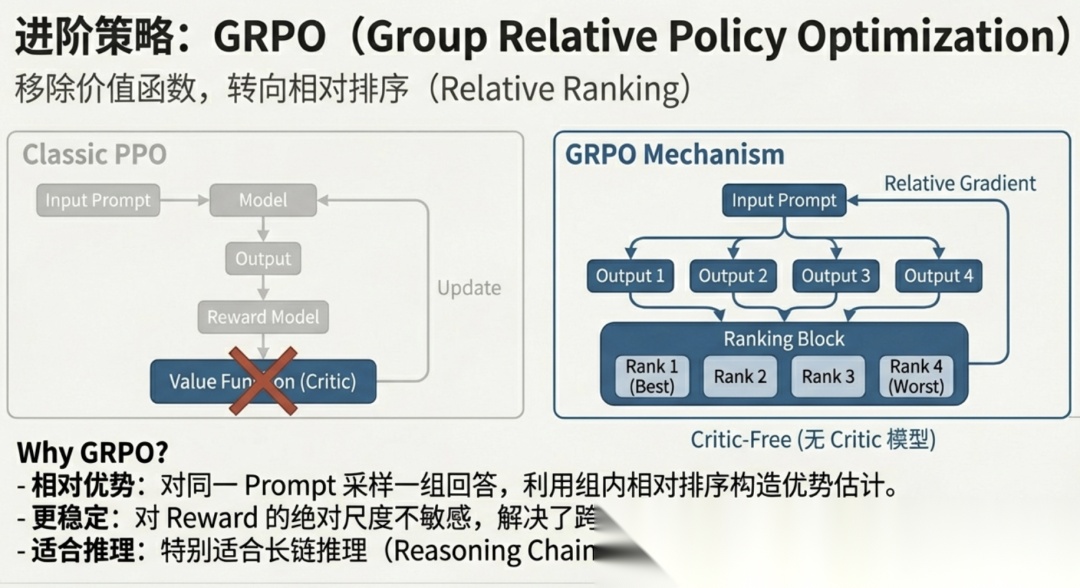
(2)基于偏好的“去 Critic”方法:DPO 与 GRPO
随着实践深入,一个共识逐渐形成:在对齐任务中,我们更关心“哪个回答相对更好”,而非精确量化“回答价值多少”。这催生了一系列不依赖显式价值函数的方法。
-
DPO(Direct Preference Optimization):直接利用成对的偏好数据(preferred vs. rejected),通过一个简洁的目标函数,促使模型提高优质回答的概率,同时抑制劣质回答。它绕过了训练奖励模型和优化PPO 的复杂流程。
-
GRPO(Group Relative Policy Optimization):对同一个提示采样一组回答,利用组内回答的相对奖励排序来构造优势估计,从而完全移除了价值函数。此方法对奖励的绝对尺度不敏感,稳定性高,尤其适合需要对长推理链进行评判的场景。
GRPO 可被视为将“同题对比”的偏好信号,直接、高效地固化进模型参数。这篇论文,提出了一种非参数更新的GRPO方案
(Training-Free Group Relative Policy Optimization https://arxiv.org/abs/2510.08191),但是思想是类似的,有兴趣可扩展阅读。
概言之,后训练阶段引入 RL 的本质,并非向模型灌输新知识,而是 系统性地重塑模型的生成策略分布,使其在面对同一问题时,更倾向于选择符合人类偏好或任务目标的输出路径。
二、In-Context Learning(ICL):模型为什么“看起来会学习”?
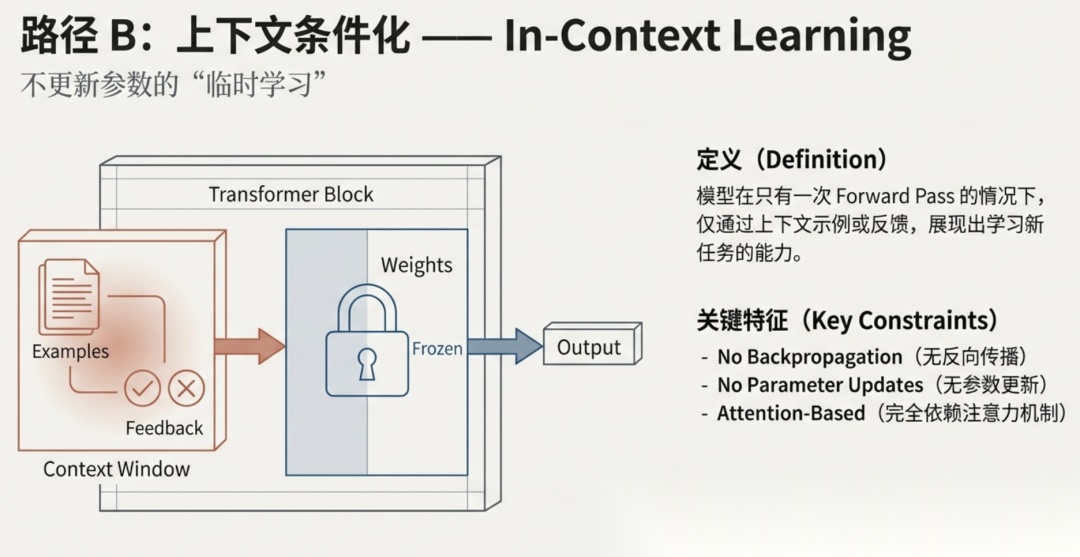
与需要更新模型参数的后训练 RL 不同,In-Context Learning(ICL)展现了模型通过 上下文中的示例或反馈,就能“临时学会”新任务的惊人能力。
1. 什么是 In-Context Learning?
ICL 指的是:模型在不进行任何参数更新的情况下,仅通过推理时提供的上下文信息,就表现出类似学习新任务或调整行为的能力。例如,通过给模型提供几个“问题-答案”示例,它就能回答新的同类问题。
Q: 2 + 3 = ?
A: 5
Q: 4 + 7 = ?
A: 11
Q: 6 + 9 = ?
A:
模型输出 15 ,但整个过程中:
-
没有反向传播
-
没有参数更新
-
只有一次 forward pass
2. ICL 的典型形式
- Few-shot 示例学习:通过提供少量样例,让模型学会执行新任务。这
是最基础的形式。
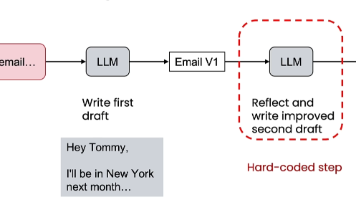
- Self-Refine / Reflexion:模型给自己(或接收外部给予的)自然语言反馈,并据此修订输出。这显示了模型能在上下文中利用错误经验进行启发式改进。
- In-Context Reinforcement Learning(ICRL):这是最接近 RL 的形式。即在上下文(Prompt)中,给予模型过往的行为序列及其对应的标量奖励,然后要求模型进行后续决策。研究显示,模型能表现出类似“利用高奖励行为”的现象。
ICRL 例如:
Action: A
Reward: 1
Action: B
Reward: 0
模型会在后续选择中:
-
更偏向 reward 更高的行为
-
表现出类似 bandit / RL 的策略调整
3. ICL 与 RL 的关系:相似,但不等价
ICRL 中出现的 Reward-sensitive behavior(模型决策显式依赖奖励大小)和 Exploitation(模型系统性地偏向高奖励行为)等现象,很容易让人联想到强化学习。然而,必须澄清其本质区别:
这些行为的发生机制,完全是 Transformer 基于其强大的序列建模能力和在预训练中学到的统计相关性归纳偏置。它在推理过程中,将上下文中的 (Action, Reward) 对作为一种条件信息来处理,并通过注意力机制,临时性地影响了后续 token 的生成概率分布。这种“策略调整”是瞬态的、局限于当前上下文窗口的,一旦推理结束便不复存在。
为什么“没有参数更新”的 ICRL,仍然会表现出强化学习中才有的行为特征?在 ICRL 中:
**-**reward-sensitive behavior 指的是: 模型的决策 显式依赖 reward 大小,而不是仅仅模仿示例格式
- exploitation 指的是: 在上下文中观察到 reward 差异后,模型会 系统性偏向高 reward 行为,而不是均匀或随机选择
非常重要的一点是:
这些行为并不是“真正学会了 RL 算法”,而是 Transformer 在上下文中实现了一种“临时策略更新”。
(1)什么叫 reward-sensitive behavior?
(不是“看到了 reward”那么简单)
非 reward-sensitive 的情况(对照组), 考虑这样一个 prompt:
Trial 1:
Action: A
Reward: 1
Trial 2:
Action: B
Reward: 0
Now choose an action:
如果模型只是:复述 A / B,或随机选一个,或只学“格式”,那它
不具备 reward-sensitive behavior。ICRL 中所谓 reward-sensitive,至少包含三层:
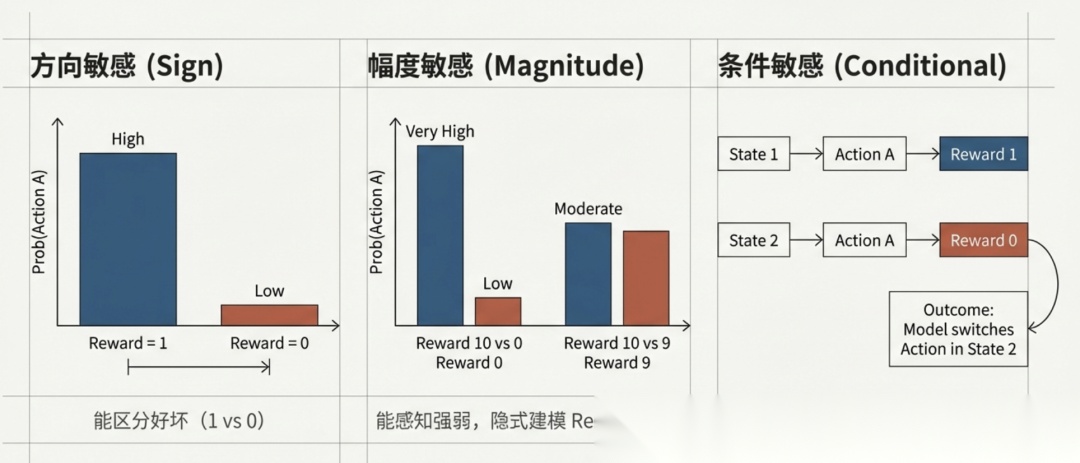
-
方向敏感(sign-sensitive): 模型能区分reward 高 / 低, 好 / 坏, 并
在后续决策中 改变偏好方向。 -
幅度敏感(magnitude-sensitive)
如果 prompt 变成:
Action: A
Reward: 10
Action: B
Reward: 9
模型仍然偏向 A,但 不如 reward=10 vs 0 时那么坚定。这说明模型不仅识别顺序,还在隐式建模 reward 的“强弱”。
- 条件敏感(conditional on context)
如果 reward 与状态绑定:
State: S1
Action: A
Reward: 1
State: S2
Action: A
Reward: 0
模型会在新 state 下 调整行为,而不是全局记忆。📌 这已经超过“模式模仿”,进入了“策略条件化”的范畴。
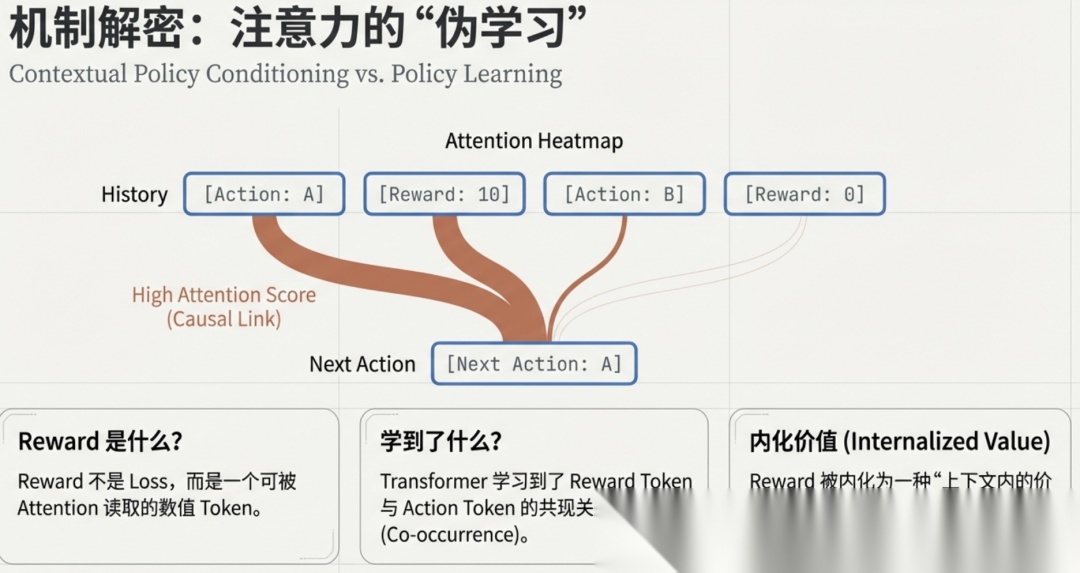
那么,reward 被当成了什么?
在 ICRL 中,reward 并不是 loss,而是:一个可被 attention 读取、参与计算的数值 token。Transformer 会学到:reward token 与 action token 的共现关系,reward 大小对后续 action logits 的影响。可以把它理解为:
reward 被内化为一种“上下文内的价值信号”,用来调节后续决策的激活模式。
(2)什么叫 exploitation?
a. 强化学习里的 exploitation 是什么?
在标准 RL 中:
-
exploration:尝试不确定行为
-
exploitation:反复选择当前估计最优行为
关键点是:exploitation 是一种 策略偏置的积累结果。
b. ICRL 中 exploitation 的可观测现象
在 ICRL 实验中,典型现象包括:
b.1 选择概率随历史 reward 单调变化
给模型一个多轮上下文:
Round1: A → reward 1
Round2: A → reward 1
Round3: B → reward 0
在 Round 4:A 被选中的概率显著上升, 且随“成功次数”增加而增加
b.2 减少探索行为
在早期:模型尝试 A、B、C
在看到 reward 差异后:选择逐渐集中, 低 reward action 出现频率下降
👉 这是 exploitation 的行为学定义。
关键问题:模型“记住”了什么?
模型并没有在参数里记住任何东西,它“记住”的是:
-
上下文中的 历史轨迹
-
reward-action 的对应关系
Transformer 做的是:
在当前上下文窗口中,对“历史成功行为”进行条件化生成。
这等价于一种 contextual policy conditioning, 而不是 policy learning
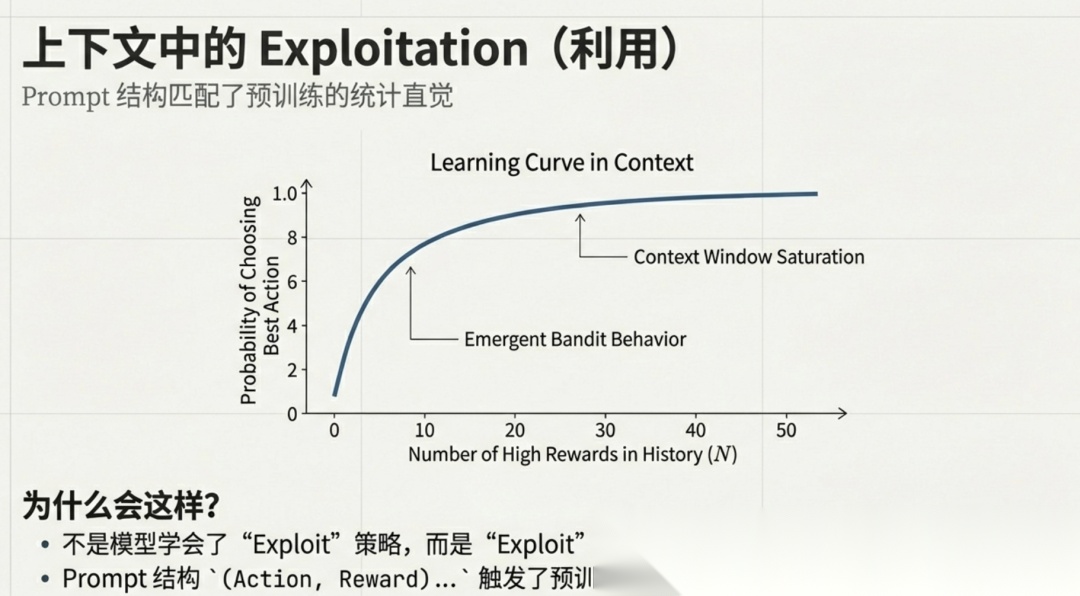
为什么 ICRL 会自然地产生 exploitation?
(1) Transformer 的归纳偏置
Transformer 在预训练中已经学会:
-
从序列中提取 统计相关性
-
根据历史模式预测未来 token
ICRL 的 prompt 结构恰好匹配了:“根据历史反馈调整决策”的统计结构
(action, reward), (action, reward), ...
→ next action
(2) ICRL ≈ 在上下文中模拟一个 Bandit / RL 算法
你可以把 ICRL 看成:Transformer 在 activation space, **执行了一次近似的 policy update。**但这个“policy”是:
-
临时的
-
只存在于 attention / MLP 激活中
-
随着 prompt 结束立刻消失
Exploitation 的本质来源,**不是模型学会了“我应该 exploit”,而是“exploit 恰好是最大化条件概率的结果”。**当模型发现:“action A + 高 reward”,在上下文中是一个强相关模式,那么生成 A 就成为 最大似然选择。
因此,ICRL 展示的其实是 “像 RL 的行为模式”,而非 “RL 的学习机制”。两者在多个维度上存在根本差异:
| 维度 | ICRL | 真正 RL(如 PPO / GRPO) |
|---|---|---|
| 行为模式来源 | 上下文统计偏置(注意力机制临时调整) | 模型参数层的持久更新 |
| 奖励使用方式 | 作为上下文中的信息 token | 作为优化目标的梯度信号 |
| 改变的持久性 | ❌ 仅在当前上下文内有效 | ✅ 固化到模型参数中 |
| 是否存在深度信用分配 | ❌ 仅表层模仿 | ✅ 深层梯度反向传播 |
| 跨任务的泛化能力 | ❌ 未见过的上下文任务效果不确定 | ✅ 可从训练分布泛化至相似任务 |
关键在于:模型并没有真正“学会”强化学习算法,而是在已有的能力基础上,通过上下文巧妙地模拟了一种策略优化的效果。
三、为何将 ICL 与后训练 RL 并列讨论?
将“上下文学习”与“强化学习”放在同一框架下审视,揭示了模型能力演进的一条清晰路径:
-
能力展示(ICL/ICRL):证明了大规模预训练模型本身就内嵌了对反馈信号的理解、利用能力和初步的策略调整潜能,这一切仅在推理阶段的激活空间中即可发生。
-
能力固化(后训练 RL):以 GRPO 为代表的后训练 RL 方法,其核心作用正是捕捉并放大这种潜能。它将模型在上下文内短暂、不稳定、依赖于特定提示的策略偏置,通过离线优化,系统地、持久地固化到模型的参数层面。
因此,二者的关系可以概括为:ICL 是模型内在能力的“橱窗展示”,而后训练 RL 则是将这种能力“产品化”和“工程化”的核心手段。
四、总结
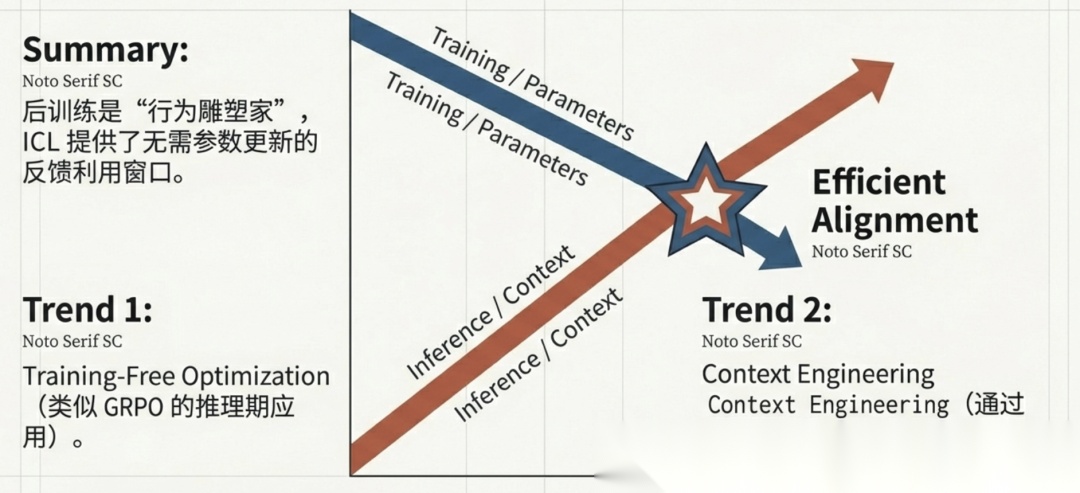
在大模型对齐与优化的技术栈中,后训练阶段的强化学习扮演着“行为雕塑家”的角色,通过偏好与奖励信号,系统性地重塑模型的生成策略。与此同时,In-Context Learning,尤其是其强化学习变体,为我们打开了一扇窗,让我们得以窥见模型如何在不更新参数的情况下,仅凭上下文信息就能灵活利用反馈信号。这两种范式相互印证,又彼此区别,共同指向一个中心事实:现代大语言模型具备复杂的、可被引导的策略形成能力。而后续技术发展的核心挑战之一,便是如何更高效、更稳健地将模型在推理中展现的“灵光一现”,转化为参数中稳定、可泛化的“行为守则”。
👉下一步:
作为工程/应用主导的开发人员,可以更多从in-context learning入手来优化agent的能力,毕竟比起训练所需的技能与计算资源,前者更容易入手和实践,且效果更立竿见影。接下来我也会出系列文章,就如何通过传统的上下文工程及memory的优化通过in-context提升非参数更新的理论梳理与优化实践 ;)
学AI大模型的正确顺序,千万不要搞错了
🤔2026年AI风口已来!各行各业的AI渗透肉眼可见,超多公司要么转型做AI相关产品,要么高薪挖AI技术人才,机遇直接摆在眼前!
有往AI方向发展,或者本身有后端编程基础的朋友,直接冲AI大模型应用开发转岗超合适!
就算暂时不打算转岗,了解大模型、RAG、Prompt、Agent这些热门概念,能上手做简单项目,也绝对是求职加分王🔋

📝给大家整理了超全最新的AI大模型应用开发学习清单和资料,手把手帮你快速入门!👇👇
学习路线:
✅大模型基础认知—大模型核心原理、发展历程、主流模型(GPT、文心一言等)特点解析
✅核心技术模块—RAG检索增强生成、Prompt工程实战、Agent智能体开发逻辑
✅开发基础能力—Python进阶、API接口调用、大模型开发框架(LangChain等)实操
✅应用场景开发—智能问答系统、企业知识库、AIGC内容生成工具、行业定制化大模型应用
✅项目落地流程—需求拆解、技术选型、模型调优、测试上线、运维迭代
✅面试求职冲刺—岗位JD解析、简历AI项目包装、高频面试题汇总、模拟面经
以上6大模块,看似清晰好上手,实则每个部分都有扎实的核心内容需要吃透!
我把大模型的学习全流程已经整理📚好了!抓住AI时代风口,轻松解锁职业新可能,希望大家都能把握机遇,实现薪资/职业跃迁~
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 4
4 0
0- 0



 已为社区贡献66条内容
已为社区贡献66条内容

所有评论(0)