基于Matlab/Simulink的异步电机SVPWM变频调速建模仿真
基于Matlab/simulink的异步电机SVPWM变频调速建模仿真
在电机控制领域,异步电机凭借其结构简单、成本低、运行可靠等优点,广泛应用于工业生产和日常生活中。而空间矢量脉宽调制(SVPWM)技术因其直流电压利用率高、谐波含量少等优势,成为异步电机变频调速系统中常用的调制方式。本文将详细介绍如何基于Matlab/Simulink搭建异步电机SVPWM变频调速系统的模型并进行仿真。
一、SVPWM基本原理
SVPWM的核心思想是通过控制逆变器的开关状态,合成期望的空间电压矢量,以实现对电机的调速控制。在三相逆变器中,共有8种开关状态,其中6种有效矢量和2种零矢量。通过合理组合这些矢量的作用时间,可以合成任意期望的空间电压矢量。
以三相电压型逆变器为例,其开关状态与空间电压矢量的关系如下:
假设三相逆变器的三个桥臂分别为A、B、C,每个桥臂有两种开关状态(1表示上桥臂导通,0表示下桥臂导通)。那么8种开关状态分别为:(0 0 0)、(0 0 1)、(0 1 0)、(0 1 1)、(1 0 0)、(1 0 1)、(1 1 0)、(1 1 1)。
基于Matlab/simulink的异步电机SVPWM变频调速建模仿真
其中(0 0 0)和(1 1 1)为零矢量,其余6个为有效矢量,分别对应空间不同方向的电压矢量。
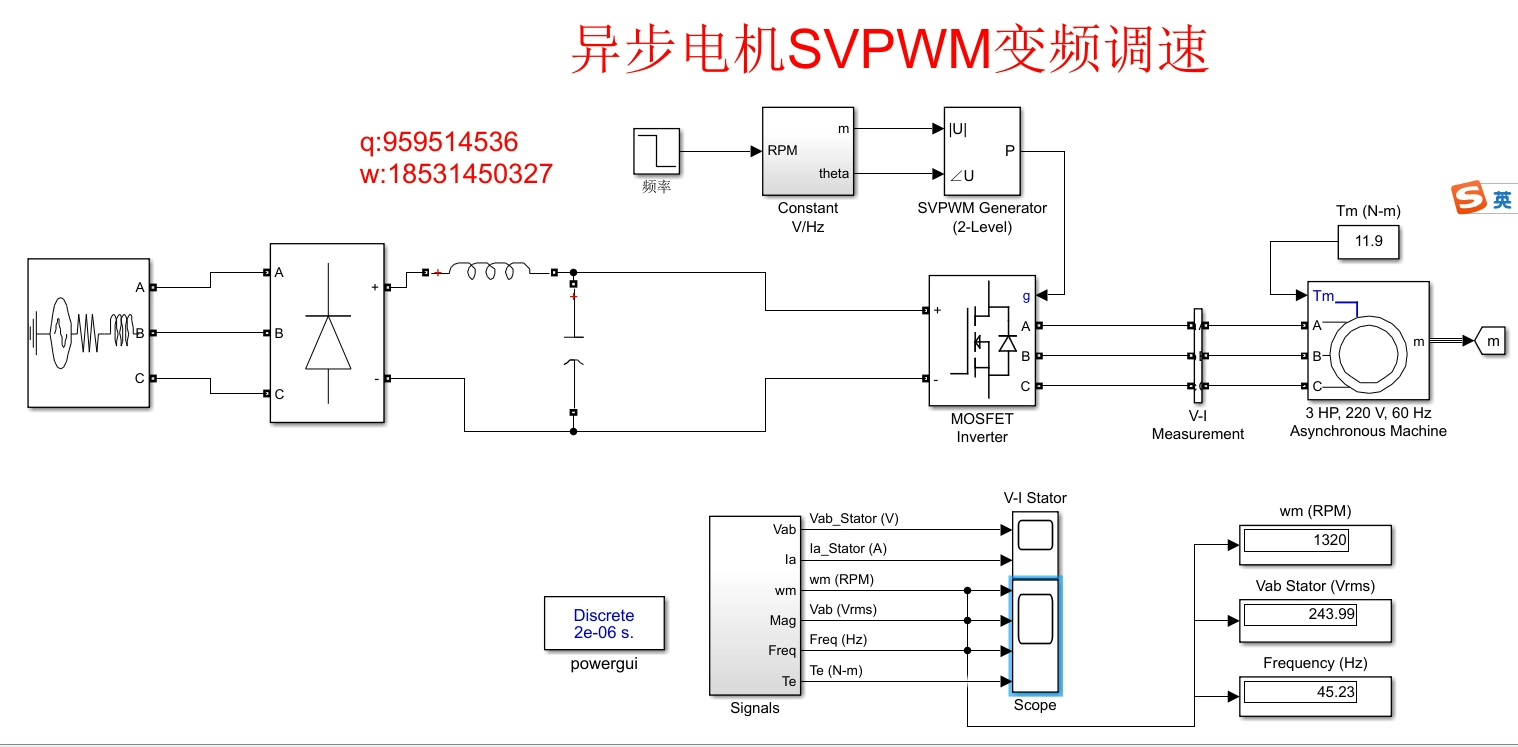
二、Matlab/Simulink模型搭建
1. 异步电机模型
在Simulink库中,可以找到“Simscape Electrical”模块集,从中选取“Induction Machine SI Units”模块来搭建异步电机模型。该模块需要设置电机的一些参数,如额定功率、额定电压、额定频率、定子电阻、转子电阻、定子电感、转子电感等。
% 以下为异步电机部分参数设置示例
Pn = 2; % 额定功率 2kW
Vn = 380; % 额定线电压 380V
fn = 50; % 额定频率 50Hz
Rs = 1.5; % 定子电阻 1.5Ω
Rr = 1.2; % 转子电阻 1.2Ω
Ls = 0.2; % 定子电感 0.2H
Lr = 0.2; % 转子电感 0.2H2. SVPWM模块
搭建SVPWM模块,主要包括扇区判断、矢量作用时间计算和PWM信号生成等部分。
扇区判断
通过给定的参考电压矢量在α-β坐标系中的坐标,判断其所在扇区。
function sector = sector_judgment(Vref_alpha, Vref_beta)
% 判断参考电压矢量所在扇区
theta = atan2(Vref_beta, Vref_alpha);
if theta >= 0 && theta < pi/3
sector = 1;
elseif theta >= pi/3 && theta < 2*pi/3
sector = 2;
elseif theta >= 2*pi/3 && theta < pi
sector = 3;
elseif theta >= -pi && theta < -2*pi/3
sector = 4;
elseif theta >= -2*pi/3 && theta < -pi/3
sector = 5;
elseif theta >= -pi/3 && theta < 0
sector = 6;
end
end矢量作用时间计算
根据所在扇区,计算相邻两个有效矢量和零矢量的作用时间。
function [T1, T2, T0] = time_calculation(Vref_alpha, Vref_beta, sector, Ts)
% Ts为采样周期
Vdc = 540; % 直流母线电压
V1 = 2/3 * Vdc;
if sector == 1
T1 = Ts * Vref_alpha / V1;
T2 = Ts * Vref_beta / (sqrt(3)/2 * V1);
elseif sector == 2
T1 = Ts * (-Vref_alpha/2 + sqrt(3)/2 * Vref_beta) / (sqrt(3)/2 * V1);
T2 = Ts * (Vref_alpha/2 + sqrt(3)/2 * Vref_beta) / (sqrt(3)/2 * V1);
% 其他扇区计算类似
end
T0 = Ts - T1 - T2;
endPWM信号生成
根据计算得到的矢量作用时间,生成三相PWM信号。
3. 速度环与电流环控制
为了实现对异步电机的高性能调速控制,通常采用双闭环控制策略,即速度环和电流环。速度环根据给定转速和实际转速的偏差,通过PI控制器输出转矩电流给定值。电流环根据转矩电流给定值和实际电流的偏差,通过PI控制器输出电压给定值,作为SVPWM模块的输入。
% 速度环PI控制器参数
Kp_speed = 0.5;
Ki_speed = 10;
% 电流环PI控制器参数
Kp_current = 10;
Ki_current = 100;三、仿真结果分析
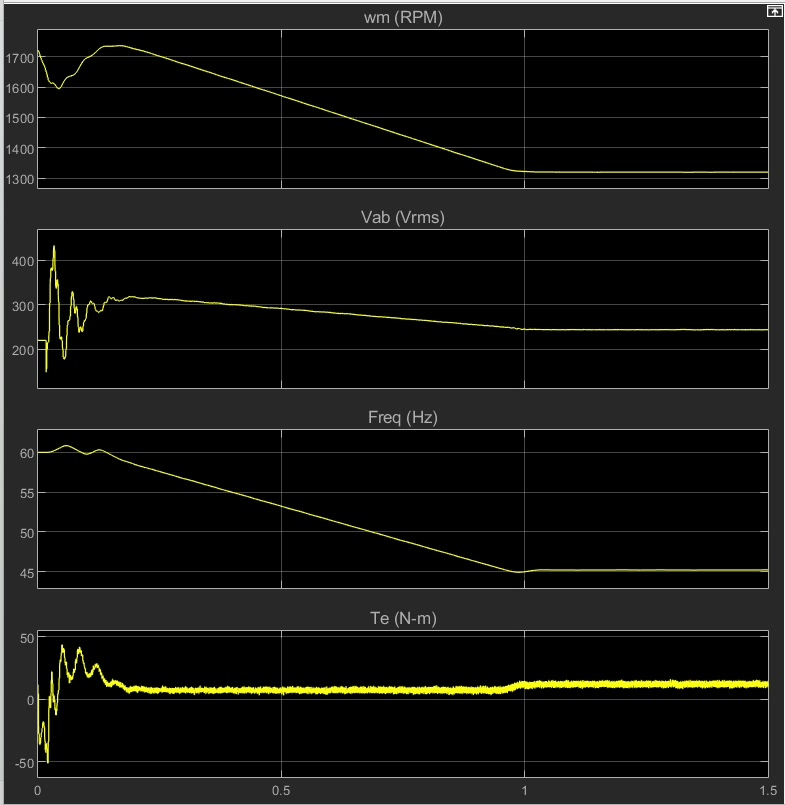
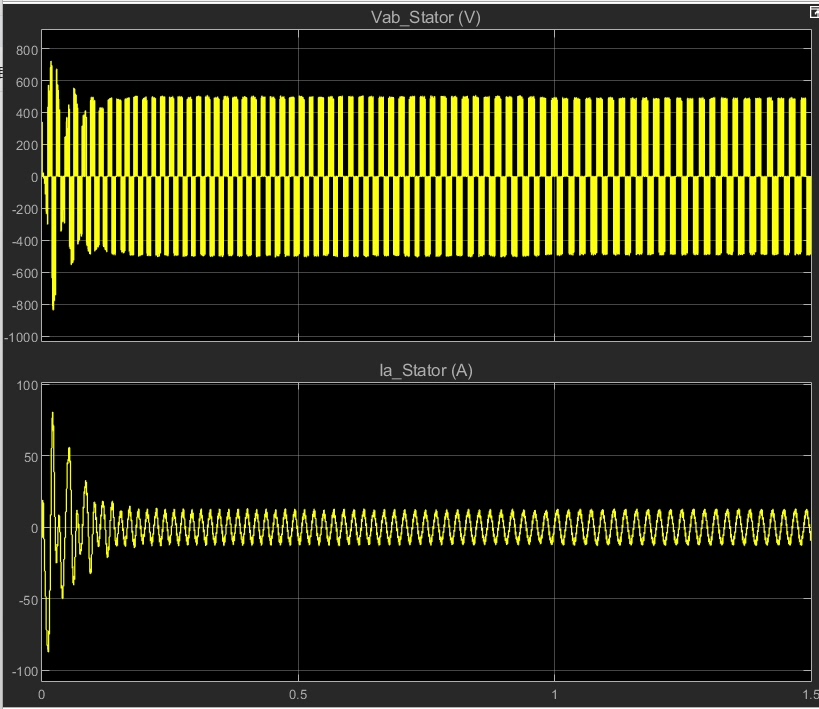
搭建好模型后,设置仿真参数,如仿真时间、步长等,运行仿真。从仿真结果中可以观察到异步电机的转速、转矩、电流等波形。
当给定转速阶跃变化时,可以看到电机转速能够快速跟踪给定值,超调量较小,说明速度环和电流环的控制效果良好。同时,通过分析电流波形,可以验证SVPWM技术有效降低了谐波含量。
通过基于Matlab/Simulink的异步电机SVPWM变频调速建模仿真,我们深入理解了异步电机的调速原理和SVPWM技术的应用,同时也掌握了如何利用Matlab/Simulink工具进行电力电子与电机控制系统的设计与分析。希望本文能为相关领域的学习者和研究者提供有益的参考。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)