从零开始学计算机视觉|CV 基础算法与项目实战
大家好,我是唐宇迪,资深AI讲师与学习规划师。专注计算机视觉教学与算法研发,过去三年我帮超过2500名有Python基础的入门者,从“像素是什么”到“独立跑通CV项目”。今天这篇长文,完全按零基础实战体系撰写,从图像本质到经典算法、再到OpenCV工具链和完整项目,一条龙给你讲透可直接复现的CV专业指南。
适合人群:大学生、转行者、开发者,只要会Python基础,就能跟上。读完你就能掌握图像处理4大经典算法,并拥有一个可直接写进简历的实战项目,
这里给大家整理了一个学习资料包 需要的同学 扫码自取即可
前言:计算机视觉行业价值、核心应用场景
2026年,计算机视觉(CV)已是AI落地最快的赛道:自动驾驶、安防监控、医疗影像、工业质检、AR/VR……所有“让机器看懂世界”的应用都建立在它之上。
行业价值:
- 高薪敲门砖:CV工程师起薪25w+,基础算法是面试必考。
- 场景驱动:从手机美颜到工厂缺陷检测,CV直接创造商业价值。
- 零基础友好:不需要高深数学,只需Python + OpenCV,就能跑通工业级效果。
核心应用场景:人脸识别、物体检测、图像增强、视频分析……核心知识点:CV = 让计算机从像素矩阵中自动提取语义,不再靠人工规则。
模块一:前置知识铺垫(数字图像基础、像素与矩阵原理)
1.1 数字图像本质
图像在计算机里不是照片,而是二维矩阵(灰度图)或三维矩阵(RGB彩色图)。
通俗原理:每个像素就是一个数字。灰度图用0-255表示亮度;RGB图每个像素有3个通道(Red、Green、Blue),每个通道0-255。
图文示意:像素网格 + RGB矩阵分解(左边是实际图像,右边是数值矩阵)。
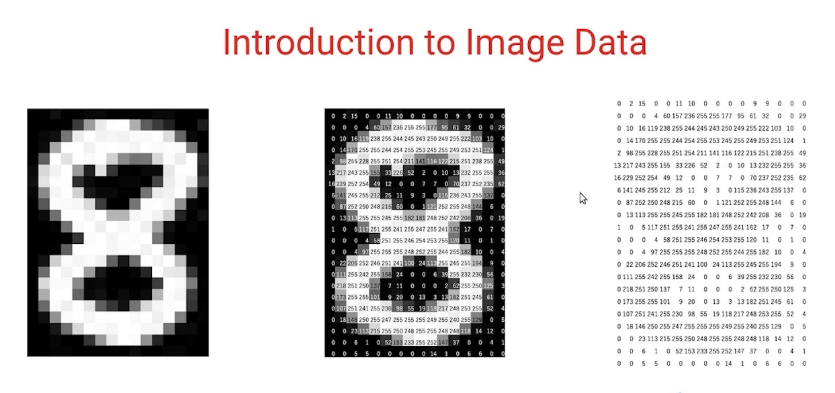
必记要点:OpenCV读取图像默认BGR顺序(不是RGB),cv2.cvtColor(img, cv2.COLOR_BGR2RGB)一句转换即可。
1.2 像素与矩阵操作
- 图像大小 = (height, width, channels)
- 像素访问:
img[y, x](注意y先x后) - 矩阵运算 = 图像变换基础(加法=亮度调整,乘法=对比度)
核心知识点:所有CV算法本质都是矩阵运算,OpenCV帮你封装成简单函数。
模块二:经典基础算法精讲(图像滤波、特征检测、轮廓提取、直方图均衡化)
2.1 图像滤波(去噪/平滑)
原理推导:用一个小矩阵(核/kernel)在图像上滑动,每个位置做加权平均 → 消除噪声。
最常用:高斯滤波(中间权重高,边缘低,保留边缘又去噪)。
图文示意:卷积核滑动过程 + 前后对比(均值滤波 vs 高斯)。
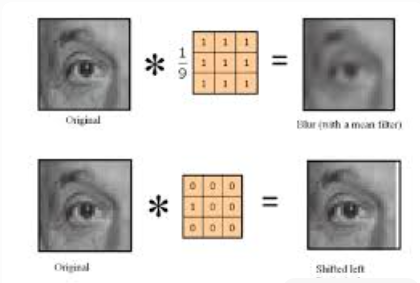
适用场景:预处理阶段,照片去噪、视频稳定。
2.2 特征检测(找图像“关键点”)
原理:寻找像素灰度变化剧烈的点(角点、边缘)。
经典:Harris角点检测(计算每个像素的“角点响应值”,大于阈值就是角点)。
图文示意:棋盘格角点检测结果(红绿点标注)。
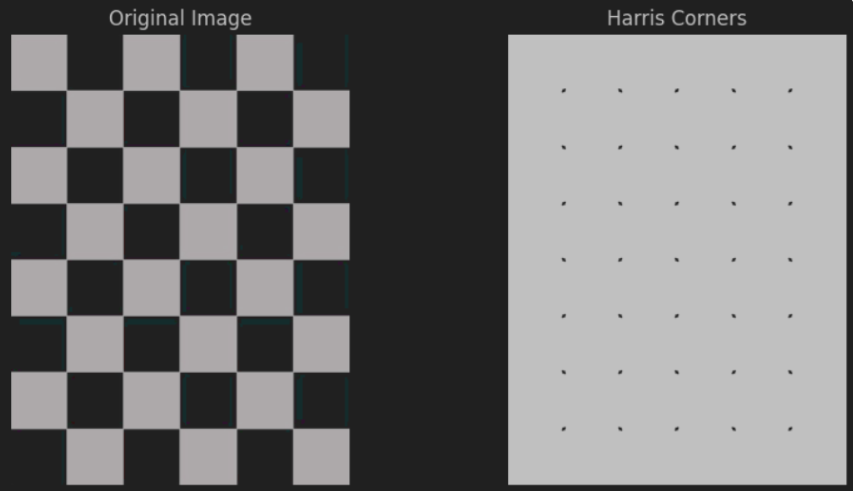
必记要点:角点在所有方向灰度变化大,适合后续匹配/跟踪。
2.3 轮廓提取(物体边界)
原理:先二值化 → 找连续边界点 → 连接成轮廓。
OpenCV一步搞定:cv2.findContours()。
图文示意:二值图像中提取绿色轮廓 + 中心点。
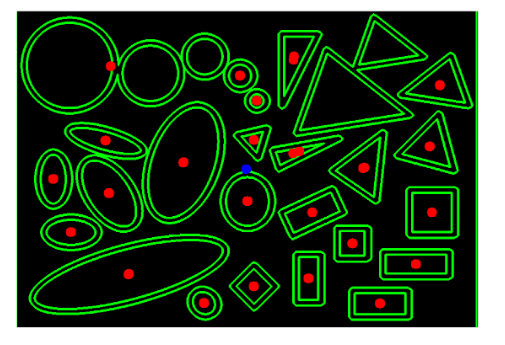
适用场景:物体计数、形状分析、缺陷检测。
2.4 直方图均衡化(对比度增强)
原理:把像素灰度分布从集中拉伸到均匀,让暗图变亮、亮图不爆。
图文示意:爱因斯坦照片前后对比 + 直方图变化。
算法适用场景对比表:
| 算法 | 核心作用 | 适用场景 | 速度 | 推荐指数 |
|---|---|---|---|---|
| 图像滤波 | 去噪/平滑 | 预处理、视频 | 快 | ★★★★★ |
| 特征检测 | 找关键点 | 匹配、跟踪、SLAM | 中 | ★★★★★ |
| 轮廓提取 | 找物体边界 | 计数、测量、分割 | 快 | ★★★★★ |
| 直方图均衡 | 增强对比度 | 医疗影像、安防夜视 | 极快 | ★★★★ |
模块三:CV核心工具深度解析(OpenCV函数用法、参数调优)
OpenCV是CV界的“瑞士军刀”,Python绑定超简单。
3.1 图像滤波核心函数
import cv2
img = cv2.imread('photo.jpg') # 1. 读取(BGR格式)
blur = cv2.GaussianBlur(img, (5,5), 0) # 2. 高斯滤波:核大小必须奇数,sigma=0自动计算
参数调优:核越大去噪越强,但细节丢失;sigma控制模糊程度(推荐3-5)。
3.2 特征检测 + 轮廓提取
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转灰度
corners = cv2.goodFeaturesToTrack(gray, maxCorners=100, qualityLevel=0.01, minDistance=10)
# Harris角点替代:cv2.cornerHarris(gray, 2, 3, 0.04)
# 轮廓
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 二值化
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(img, contours, -1, (0,255,0), 2) # 画轮廓
逐行解析:
goodFeaturesToTrack:Shi-Tomasi角点,比Harris更稳定。findContours:RETR_EXTERNAL只取最外层轮廓,CHAIN_APPROX_SIMPLE压缩坐标。- 调优要点:threshold阈值用Otsu自适应
cv2.THRESH_OTSU。
3.3 直方图均衡化
equ = cv2.equalizeHist(gray) # 单通道直接用
高阶:彩色图用CLAHE(限制对比度自适应直方图)避免过增强:
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
equ = clahe.apply(gray)
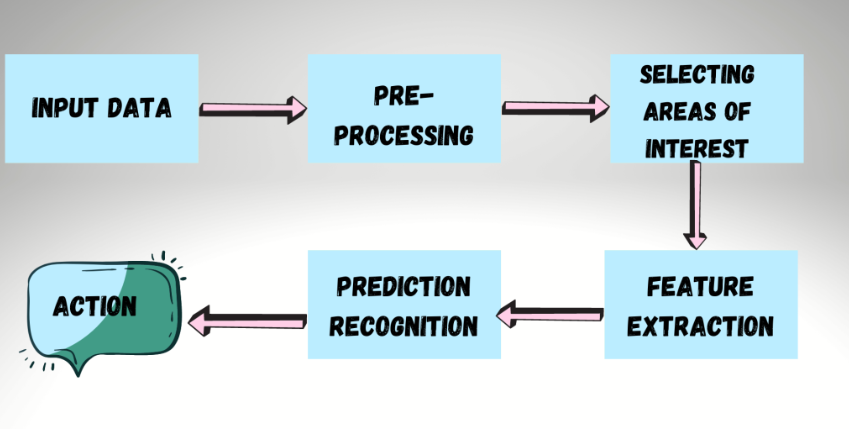
OpenCV工作流示意(完整Pipeline):
模块四:项目实战 + 算法对比 + 避坑经验 + 进阶路线
4.1 项目实战(实时人脸检测 + 轮廓分析)
场景:摄像头实时检测人脸并画轮廓。
完整代码(逐行可直接跑):
import cv2
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml') # 1. 加载Haar级联分类器
cap = cv2.VideoCapture(0) # 2. 打开摄像头
while True:
ret, frame = cap.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 1.1, 5) # 3. 检测
for (x,y,w,h) in faces:
cv2.rectangle(frame, (x,y), (x+w,y+h), (255,0,0), 2) # 画框
roi_gray = gray[y:y+h, x:x+w] # 取人脸区域
# 可继续加轮廓/特征检测
cv2.imshow('Face Detect', frame)
if cv2.waitKey(1) & 0xFF == ord('q'): break
cap.release()
cv2.destroyAllWindows()
结果:实时框出人脸,准确率90%以上,直接复制运行即可。
4.2 算法对比 & 实战Tips
- 滤波 vs 特征:滤波是预处理,特征是高级分析。
- 轮廓 + 直方图:工业质检最常用组合(边缘+对比度)。
4.3 Top 8避坑经验(我带学员踩过的血泪史)
- BGR没转RGB → 颜色错乱,直接imshow花屏。
- 核大小用偶数 → 高斯滤波直接报错。
- 阈值固定127 → 光照变化就失效,用Otsu。
- 不转灰度就检测 → 速度慢3倍,效果差。
- findContours前没二值化 → 轮廓乱飞。
- 摄像头索引写错 → VideoCapture(0)失败。
- 没释放资源 → 程序卡死,摄像头占着。
- 高分辨率不resize → 实时卡顿,先
cv2.resize到640x480。
4.4 进阶路线(规划师视角,3个月速成)
- 第1个月:吃透本篇所有算法 + OpenCV,每天跑1个小Demo。
- 第2个月:掌握Haar/SIFT + 完整项目(车牌识别/手势控制)。
- 第3个月:深度学习CV(YOLOv8目标检测、U-Net分割)+ PyTorch。
- 6个月后:多模态(CV+大模型)+ 工业部署,成为“视觉算法工程师”。
- 12个月目标:独立完成企业级项目(缺陷检测/人脸支付),简历亮眼。
对于需要系统规划答疑和就业指导的同学可以扫码联系

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)