基于改进自适应遗传算法的机器人路径规划:开辟高效路径新征程
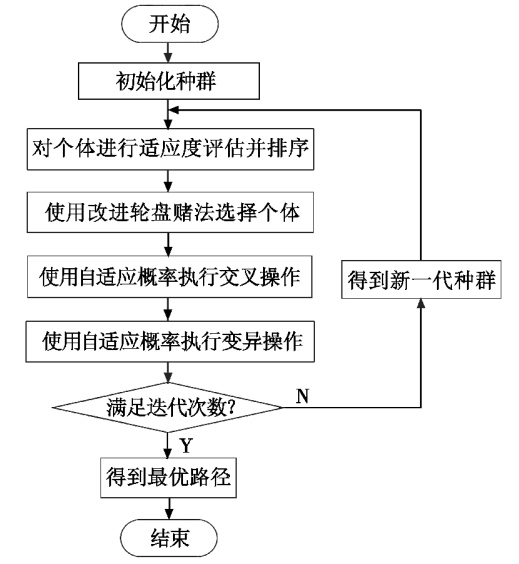
基于改进自适应遗传算法的机器人路径规划 本模型改进传统的遗传算法收敛速度较慢、局部搜索能力差等缺点。 将路径的长度和拐点数量同时作为适应度评估指标,并对轮盘赌选择法进行了改进,设计了自适应交叉算子和变异算子,提出了一种新的自适应遗传算法。 该算法平均最短路径分别缩短了 9.9% 和 5.37% ,路径的拐点数量和算法收敛的迭代次数更少。 模型有详细注释与说明paper 注意:本产品为文本文件
在机器人路径规划领域,传统遗传算法常常因收敛速度慢、局部搜索能力欠佳而备受困扰。今天咱就唠唠基于改进自适应遗传算法的机器人路径规划,看看它是如何突破这些局限的。
一、改进的必要性
传统遗传算法在面对复杂环境时,就像蒙着眼睛走路,收敛速度慢,容易在局部最优解上“徘徊”。而我们改进的模型,就是要解决这些问题,让机器人能更快速、精准地找到最优路径。
二、改进策略
(一)适应度评估指标
以往可能只单纯考虑路径长度,而现在我们将路径的长度和拐点数量同时作为适应度评估指标。为啥这么做呢?想象一下,如果只看路径长度,机器人可能走了一条很长但拐来拐去特别复杂的路,这显然不是我们想要的。结合拐点数量,能让路径更“平滑”,更符合实际需求。
(二)轮盘赌选择法改进
轮盘赌选择法就像是抽奖,每个个体都有一定概率被选中进入下一代。但传统方法可能会让一些优秀个体因为运气不好没被选中。我们对它进行改进,让优秀个体有更大的概率被保留。比如在Python代码中可以这样简单示意:
import random
# 假设个体适应度列表
fitness_list = [0.2, 0.3, 0.5]
total_fitness = sum(fitness_list)
selected_index = None
r = random.random()
cumulative_fitness = 0
for i in range(len(fitness_list)):
cumulative_fitness += fitness_list[i] / total_fitness
if r <= cumulative_fitness:
selected_index = i
break
print(selected_index)这里简单模拟了一个轮盘赌选择过程,通过随机数r与累积适应度比较来选择个体。改进时,可以根据实际情况调整选择概率,让更优个体更易入选。
(三)自适应交叉算子和变异算子
自适应交叉算子和变异算子就像两个“智能助手”。传统的交叉和变异操作是固定的,不管环境和种群情况如何。而自适应算子会根据种群的进化状态来调整交叉和变异的概率。比如在种群进化初期,希望有较大的交叉概率,让个体充分交换基因,快速探索新的区域;在后期,降低交叉概率,防止破坏已经找到的较优解。变异算子同理,代码示例(这里用伪代码简单示意):
if generation < early_stage:
crossover_rate = high_rate
mutation_rate = low_rate
else:
crossover_rate = low_rate
mutation_rate = high_rate通过这样的自适应调整,能让算法更好地平衡全局搜索和局部搜索能力。
三、算法效果
改进后的算法效果显著,平均最短路径分别缩短了9.9%和5.37% ,路径的拐点数量和算法收敛的迭代次数更少。这意味着机器人能更快、更稳地到达目的地,大大提高了工作效率。

基于改进自适应遗传算法的机器人路径规划 本模型改进传统的遗传算法收敛速度较慢、局部搜索能力差等缺点。 将路径的长度和拐点数量同时作为适应度评估指标,并对轮盘赌选择法进行了改进,设计了自适应交叉算子和变异算子,提出了一种新的自适应遗传算法。 该算法平均最短路径分别缩短了 9.9% 和 5.37% ,路径的拐点数量和算法收敛的迭代次数更少。 模型有详细注释与说明paper 注意:本产品为文本文件
这个模型还带有详细注释与说明paper,方便大家深入理解和研究。如果你对机器人路径规划感兴趣,不妨深入研究下这个改进的自适应遗传算法,说不定能给你的项目带来新的灵感。无论是在工业生产中的机器人搬运,还是服务机器人在复杂室内环境的导航,它都可能是打开高效路径规划大门的钥匙。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)