AAAI 2026 Oral | 华中科大:50万点云细微缺陷怎么检?MiniShift数据集+Simple3D实时检测框架(附代码和数据集)
导读:
———————————————————————————————————————————
实际产线的3D扫描能采集50万点级别的高分辨率点云,但主流基准数据集分辨率不超过17万点,且异常集中大、易检测——现有方法在高精度+高精度缺陷场景下效果大幅上升。
华中科技大学联合湖南大学团队提出了两项工作:MiniShift,首个高清3D异常检测基准(2577个模板,每个50万点,异常焦点<1%,三级热点协议);
Simple3D,用手工描述子FPFH VCNN/ViT,通过多尺度邻域描述和局部特征空间聚合捕捉几何异常。Simple3D在MiniShift和Real3D-AD、Anomaly-ShapeNet、MulSen-AD已有三个基准上均刷新SOTA,推理速度超过20 FPS。
论文信息
———————————————————————————————————————————
标题:Towards High-Resolution 3D Anomaly Detection: A Scalable Dataset and Real-Time Framework for Subtle Industrial Defects
机构:华中科技大学智能制造装备与技术国家重点实验室/湖南大学机器人学院
一、3D异常检测为什么需要高分辨率?
现有的3D异常检测方法通常从原始点云中采样约1k个点输入,然后通过CNN或ViT提取特征。这种低分辨率策略在现有数据集上表现不错,但作为真实的工业场景存在两个根本问题:
1.1 低分辨率损失减轻缺陷
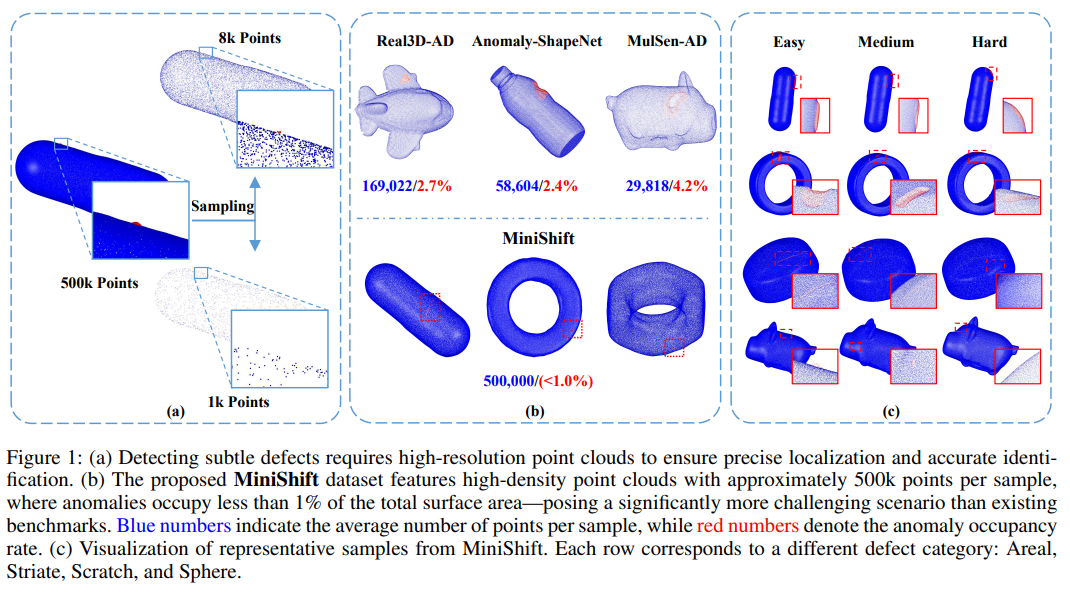
论文通过一个细心的例子说明了这一点:一个1mm×1mm的表面缺陷,在50万点的完整点云中清晰可见,降采样到8k点时仍可检测,但降采样到1k点后几乎完全消失。这个说明解析是检测缺陷的前提,而不是可选项。
1.2 现有数据集不够“难”
论文统计了五个主流3D异常检测数据集的对比:
| 数据集 | 类别数 | 总样本数 | 分辨率(点数) | 异常参与 |
|---|---|---|---|---|
| MVTec 3D-AD | 10 | 3,852 | 26,532 | 1.8% |
| Real3D-AD | 12 | 1,254 | 169,022 | 2.7% |
| 异常形状网络 | 40 | 1600 | 58,604 | 2.4% |
| 穆尔森-AD | 15 | 2,035 | 29,818 | 4.2% |
| 迷你换挡 | 12 | 2,577 | 500,000 | 小于1.0% |
MiniShift 的分辨率是现有数据集的3~19 倍,而异常占比不到 1%,远远低于其他数据集。这两个参数,使得 MiniShift 对现有方法构成了严峻的挑战。
1.3 现有方法在更高版本下运行
论文将现有的SOTA方法直接评估MiniShift,发现随着难度从Easy到Hard递增,大多数方法的O-ROC和P-ROC指标趋近于无效水平。原因有二:(1)CNN/ViT骨干的计算复杂度随要点爆炸式增长;(2)稀疏采样丢失了检测缺陷所需的局部逻辑细节。
二、MiniShift:首个高分辨率3D异常检测基准
———————————————————————————————————————————
2.1 数据集构建流程
MiniShift基于MulSen-AD数据集的3D模型构建,流程分为三步:
密集采样:从12类工业零件(胶囊式、弹簧垫、扣电池等)的原始3D模型进行密集采样,生成50万点的高分辨率点云;
某个点引导几何异常合成(AG-GAS):随机出现几个节点,计算测地路径,沿路径扩展区域并施加几何畸形变(最小或限额),生成四类缺陷——面状、条纹状、划痕、球状;
三级入口协议:根据几何显著性和视觉可感知性,将每类缺陷分为Easy/Medium/Hard三个异常子集。控制参数包括异常路径长度比α、区域半径比β和畸形变深度比γ。
2.2 AG-GAS异常合成的技术细节
AG-GAS比接头的异常合成方法(如R3D的圆形兔子/刀片、GLFM的局部扰动)更灵活:
锚点选择:随机出现两个锚点p_s和p_e,控制缺陷的位置和跨度;
测地路径计算:构建KNN(K-Nearest Neighbors)图,用Dijkstra算法求最短路径Γ,作为缺陷的中心点;
区域扩展:以路径 Γ 为中心,半径 r 内的点纳入缺陷区域 M_r;
几何畸变:沿法允许方向拉伸/压缩,畸变随距中心轴的距离线性衰减,保证极限自然。
这种设计使得异常的形状、尺寸和方向都可以灵活控制,更接近真实工业缺陷的多样性。
2.3 数据集规模
MiniShift包含12个类别,每个类别:
训练集:10张正常样本(用于异常合成)+ 剩余正常样本
集数:10张正常+极限缺陷类型×每个分量测试级别30张=130张
总共2,577个样本,每个样本500,000点
三、Simple3D:手工子+局部特征空间聚合
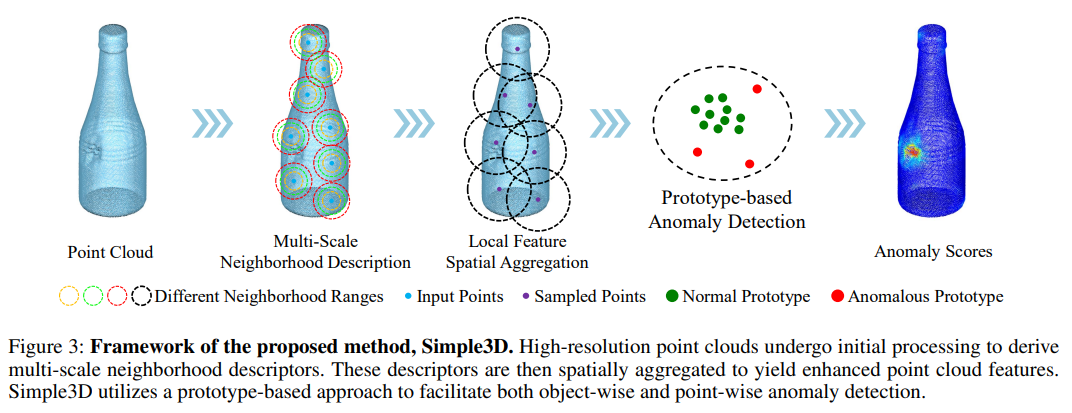
论文指出,现有方法在高分辨率点云上失效的根本原因是CNN/ViT骨干的计算成本随着增长率增长。Simple3D的核心思路是:用手工设计的点云描述子(FPFH)替代学习型干骨,再通过空间聚合增强局部几何特征的表达能力。
3.1 多尺度邻域描述(MSND)
点云中的每个点 p_i,以多组不同的邻域大小 k_1, k_2, ..., k_m 分别构建邻域集合,用 FPFH(Fast Point Feature Histograms)提取每个测量的局部对几何描述子,然后拼接形成多测量特征:
F_i = Concat(R_{i1}, R_{i2}, ..., R_{im})
论文中 k 的默认值为 40, 80, 120。多像素设计的作用是同时捕捉不同粒度的几何变化——小邻域敏感于微小划痕,大邻域敏感于大面积形变。
3.2 局部特征空间聚合(LFSA)
MSND提取的特征是单点级别的,缺乏邻域上下文。LFSA通过随机采样+邻域均值聚合来增强特征:
从点云中随机采样t个点;
对每个采样点,取其k_L个最近邻的MSND特征取均值,得到增强特征F^A;
聚合后的特征同时具有扩展的感受野和丰富的局部几何信息。
默认聚合分数k_L = 128。
3.3 基于原型的异常检测
检测阶段采用经典的原型匹配:
-
使用正常样本的增强特征构建正常原型集S;
-
对样本测试的每个点特征,计算其与最近正常原型的距离作为异常分数;
-
获取最大异常分数作为物品级异常分数。
3.4为什么用FPFH而不用学习型特征?
这是论文的一个关键见解。FPFH是一种基于倾斜法和角度直方图的手工描述子,具有三大优势:
高效计算:Open3D提供CUDA加速实现,处理50万点的速度远快于CNN/ViT前向传播;
分辨率公式:计算复杂度与输入分数近似线性,而不是 Transformer 的二次复杂度;
局部几何敏感:直接编码点的法支持夹角和距离,对微小几何变形天然敏感。
论文实验表明,在高分辨率场景下,FPFH + MSND + LFSA 的组合乃至支撑基于 Point Transformer 等学习型骨干的方法。
四、实验:四大数据集全面验证
———————————————————————————————————————————
所有实验均在NVIDIA A100 GPU上进行,评估指标为物体级AUROC(O-ROC)和点级AUROC(P-ROC),即ROC曲线下面积,数值表示检测能力越强。
4.1 MiniShift 基准结果
与六种对比方法在MiniShift上的结果(O-ROC% / P-ROC%):
| 方法 | 特征类型 | 简单的 | 中等的 | 难的 | 全部 |
|---|---|---|---|---|---|
| PatchCore-FP | FPFH | 68.3/56.5 | 65.6/54.1 | 61.4/51.1 | 65.1/53.7 |
| PatchCore-PM | PointMAE | 57.2/57.3 | 55.8/52.6 | 54.3/52.0 | 55.9/54.1 |
| PatchCore-PB | 点BERT | 55.5/51.6 | 46.6/50.3 | 52.9/50.8 | 50.0/51.4 |
| R3D-AD | — | 56.3/48.3 | 50.8/50.7 | 50.1/50.6 | 53.6/49.8 |
| GLFM | — | 57.7/67.7 | 55.0/57.3 | 52.8/52.7 | 55.8/58.7 |
| Simple3D | FPFH+MSND+LFSA | 75.6/77.3 | 68.6/65.5 | 61.6/56.3 | 68.6/66.2 |
关键发现:
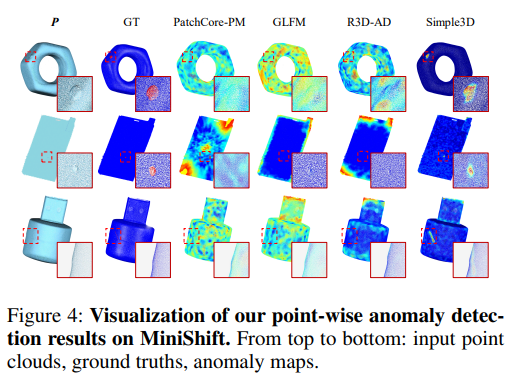
Simple3D在ALL级别上达到 68.6%/66.2%,O-ROC比第二名PatchCore-FP高出 +3.5%,P-ROC比第二名GLFM高出 +7.5%;
随着难度从Easy到Hard递增,所有方法性能均大幅下降,但Simple3D的下降幅度相对最小;
基于学习型特征(PointMAE、Point-BERT)的 PatchCore 变体在 MiniShift 上反而不如基于 FPFH 的变体,说明在高分辨率场景下手工描述子更具优势。
4.2 三个基准的结果
Simple3D 在 Real3D-AD、Anomaly-ShapeNet、MulSen-AD 上均刷新 SOTA。由于 O-ROC 和 P-ROC 的父模型分别来自不同的方法,下面依次排列(单位:%):
| 数据集 | 指标 | 硕士研究生 | Simple3D | 提升 |
|---|---|---|---|---|
| Real3D-AD | O-ROC | MC3D-AD 78.2 | 80.4 | +2.2 |
| Real3D-AD | P-ROC | ISMP 83.6 | 92.3 | +8.7 |
| 异常形状网络 | O-ROC | MC3D-AD 84.2 | 86.0 | +1.8 |
| 异常形状网络 | P-ROC | PO3AD 89.8 | 92.9 | +3.1 |
| 穆尔森-AD | O-ROC | PatchCore-FP 86.0 | 88.2 | +2.2 |
| 穆尔森-AD | P-ROC | GLFM 66.5 | 80.3 | +13.8 |
O-ROC 在三个数据集上均稳定领先 +1.8~2.2 个百分点;P-ROC 的提升在 MulSen-AD 上极其显着(+13.8),在 Real3D-AD 上也达到 +8.7,表明 Simple3D 在点级精准定位上有明显优势。
4.3 消融实验
MSND 和 LFSA 的贡献(O-ROC% / P-ROC%):
| MSND | LFSA | Real3D-AD | 异常形状网络 | 穆尔森-AD | 迷你换挡 |
|---|---|---|---|---|---|
| ✗ | ✗ | 74.2/76.9 | 78.8/77.0 | 85.1/66.2 | 67.2/56.7 |
| ✓ | ✗ | 78.1/85.3 | 83.8/85.6 | 86.8/70.7 | 67.8/57.9 |
| ✗ | ✓ | 79.8/90.0 | 85.7/90.4 | 87.1/77.3 | 67.4/63.1 |
| ✓ | ✓ | 80.4/92.3 | 86.0/92.9 | 88.2/80.3 | 68.6/66.2 |
两个组件构成明显贡献,LFSA 对 P-ROC 的提升急剧突出(Real3D-AD 从 76.9% 到 90.0%)。
分辨率的影响:在四个数据集上,从256点到8192点逐步提升分辨率,所有指标单调递增。在分辨率超过4096(2^2)后,Simple3D开始超越原有的SOTA方法,同时保持超过20 FPS的推理速度。
五、总结与思考
———————————————————————————————————————————
论文贡献
其中的部分核心贡献相辅相成:MiniShift数据集完成了高精度3D异常检测基准的空白(50万点、异常活动<1%、三级难度协议),Simple3D框架则在高分辨率场景下论证了,手动描述子(FPFH)+可以多图形聚合同时实现精度和效率的标题,在四个数据集的均值指标上刷新SOTA并保持实时推理。
几点思考
1.手工描述子的“复兴”
这篇论文的一个核心信息是:在高分辨率3D点云下场景,传统手工描述子(FPFH)反平衡学习型特征(PointMAE、Point-BERT、Point Transformer)。这与2D异常检测领域的趋势形成对比——2D领域中预训练大(DINOv2)的特征已经描绘压压手工特征,但3D领域的预训练模型尚未达到同等成熟度,且在输入高精度下的计算轮廓更加突出。Simple3D的成功提示:当学习型方法建立在计算成本或数据规模时,所提出的设计手工特征仍然是有对抗性的选择。
2. 硬检测水平仍然是开放问题
即使是 Simple3D,在 MiniShift 硬级别上的 O-ROC 也只有 61.6%,P-ROC 仅 56.3%,距离实际能够实现更大增量。硬级别的异常接近甚至小于点云的局部噪声水平,这可能需要在特征设计之外引入先验知识(如材料属性、加工工艺约束)才能进一步突破。
3. 数据集的实际价值
MiniShift虽然是合成数据集(基于AG-GAS表格),但其异常类型(面状/条纹/划痕/球状)和参数范围经过提出设计以模拟真实的工业缺陷。更重要的是,数据集和代码均已开源,这为3D检测社区提供了一个急需的高精度基准。
4.与2D方法的互补关系
论文聚焦纯3D点云异常检测,但实际工业巡检中通常同时采集RGB图像和3D点云。Simple3D的手工描述子方案计算轻量,有潜力与2D检测方法(如基于DINOv2的SubspaceAD)形成互补的多模态检测方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 13
13 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)