Matlab 实现基于CS当前统计模型与UKF的三维路径跟踪预测仿真
Matlab 基于CS当前统计模型和UKF无迹卡尔曼滤波的三维路径跟踪预测仿真
在多目标跟踪领域,如何准确地对目标的三维路径进行跟踪预测是一个关键问题。今天咱们就来聊聊基于CS当前统计模型和UKF无迹卡尔曼滤波在Matlab中的三维路径跟踪预测仿真实现。
CS 当前统计模型
当前统计(Current Statistical,CS)模型是一种自适应的机动目标跟踪模型。它假设目标的加速度是有界的,且其概率密度函数服从修正的瑞利分布。与传统的匀速或匀加速模型相比,CS模型能够更好地适应目标的机动变化。
以一维情况为例,其状态方程可以表示为:
\[
\mathbf{X}_k = \left[
\begin{array}{c}
x_k \\
\dot{x}_k \\
\ddot{x}_k
\end{array}
\right] = \left[
\begin{array}{ccc}
1 & T & \frac{T^2}{2} \\
0 & 1 & T \\
0 & 0 & 1
\end{array}
\right]
Matlab 基于CS当前统计模型和UKF无迹卡尔曼滤波的三维路径跟踪预测仿真
\left[
\begin{array}{c}
x_{k - 1} \\
\dot{x}_{k - 1} \\
\ddot{x}_{k - 1}
\end{array}
\right] + \left[
\begin{array}{c}
\frac{T^3}{6} \\
\frac{T^2}{2} \\
T
\end{array}
\right] \alpha{k - 1} + \mathbf{w}k
\]
其中,\(T\) 是采样时间间隔,\(\alpha{k - 1}\) 是目标加速度的均值,\(\mathbf{w}k\) 是过程噪声。这里这个噪声可不是随意设定的,它得根据实际情况和模型特点来选取合适的分布。在Matlab中,我们可以这样初始化状态转移矩阵 \(F\) 和过程噪声驱动矩阵 \(G\):
T = 0.1; % 采样时间间隔
F = [1 T T^2/2; 0 1 T; 0 0 1];
G = [T^3/6; T^2/2; T];UKF无迹卡尔曼滤波
无迹卡尔曼滤波(Unscented Kalman Filter,UKF)是对传统卡尔曼滤波的一种改进。传统卡尔曼滤波基于线性化假设,对于非线性系统效果欠佳。而UKF通过UT变换(Unscented Transformation)来近似非线性系统的均值和协方差,从而在非线性系统中能有更好的表现。
UKF的主要步骤包括初始化、sigma点计算、时间更新和测量更新。下面是一个简单的Matlab实现UKF时间更新部分的代码片段:
% 时间更新
X_hat = F * X_hat;
P = F * P * F' + Q;
% sigma点计算
n = size(X_hat, 1);
lambda = alpha^2 * (n + kappa) - n;
Wm = zeros(1, 2 * n + 1);
Wc = zeros(1, 2 * n + 1);
Wm(1) = lambda / (n + lambda);
Wc(1) = lambda / (n + lambda) + (1 - alpha^2 + beta);
for i = 1:n
Wm(i + 1) = 1 / (2 * (n + lambda));
Wc(i + 1) = 1 / (2 * (n + lambda));
Wm(i + n + 1) = 1 / (2 * (n + lambda));
Wc(i + n + 1) = 1 / (2 * (n + lambda));
end
Xsig = zeros(n, 2 * n + 1);
Xsig(:, 1) = X_hat;
for i = 1:n
Xsig(:, i + 1) = X_hat + sqrt((n + lambda) * P(:, i));
Xsig(:, i + n + 1) = X_hat - sqrt((n + lambda) * P(:, i));
end这里面,\(\alpha\)、\(\beta\) 和 \(\kappa\) 是UKF的参数,\(\alpha\) 决定了sigma点的分布范围,\(\beta\) 用于结合关于状态变量的先验知识(对于高斯分布,\(\beta = 2\) 是最优的),\(\kappa\) 一般设为0。
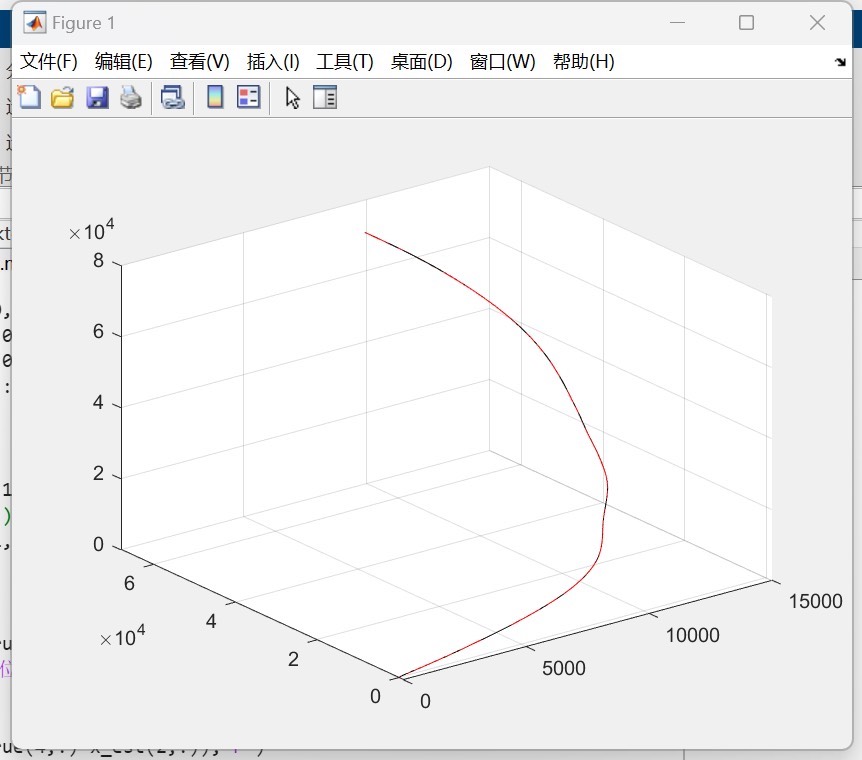
三维路径跟踪预测仿真实现
要进行三维路径跟踪预测仿真,我们把上述的一维模型拓展到三维。状态向量 \(\mathbf{X}\) 现在变为 \([x, \dot{x}, \ddot{x}, y, \dot{y}, \ddot{y}, z, \dot{z}, \ddot{z}]^T\)。状态转移矩阵 \(F\) 和过程噪声驱动矩阵 \(G\) 也相应地变为分块矩阵。
下面是一个简化的Matlab实现整个仿真流程的代码框架:
% 参数初始化
T = 0.1; % 采样时间
Q = [0.01 0 0; 0 0.01 0; 0 0 0.01]; % 过程噪声协方差
R = [0.1 0 0; 0 0.1 0; 0 0 0.1]; % 测量噪声协方差
alpha = 0.001; % UKF参数
beta = 2;
kappa = 0;
% 初始化状态和协方差
X_hat = zeros(9, 1);
P = eye(9);
% 生成模拟测量数据
num_samples = 100;
measurements = zeros(3, num_samples);
for k = 1:num_samples
% 这里模拟生成测量数据,实际应用中从传感器获取
measurements(:, k) = [randn; randn; randn];
end
for k = 1:num_samples
% CS模型状态转移
F = [eye(3) T * eye(3) T^2/2 * eye(3);
zeros(3) eye(3) T * eye(3);
zeros(3) zeros(3) eye(3)];
G = [T^3/6 * eye(3); T^2/2 * eye(3); T * eye(3)];
X_hat = F * X_hat + G * [0; 0; 0]; % 假设加速度均值为0
% UKF时间更新
% 代码同上面UKF时间更新部分
% UKF测量更新
% 这里省略具体代码,原理是通过计算Kalman增益,然后更新状态和协方差
% 例如:
% H = [1 0 0 0 0 0 0 0 0; 0 0 0 1 0 0 0 0 0; 0 0 0 0 0 0 1 0 0]; % 测量矩阵
% Y = measurements(:, k);
% Y_hat = H * X_hat;
% S = H * P * H' + R;
% K = P * H' / S;
% X_hat = X_hat + K * (Y - Y_hat);
% P = (eye(9) - K * H) * P;
end通过上述代码,我们可以初步实现基于CS当前统计模型和UKF的三维路径跟踪预测仿真。当然,实际应用中还需要根据具体的场景和需求对参数进行精细调整,对噪声模型进行优化等。希望这篇博文能为大家在相关领域的研究和实践提供一些思路。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)