探索风电机组变桨控制:OpenFast与Simulink联合仿真之旅
openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制。 独立变桨控制。 OpenFast联合仿真。 风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型的非线性风力发电机的PID独立变桨和统一变桨控制下仿真模型。 陆地5MW非线性风机进行控制,利用MATLAB SIMULINK软件结合openfast进行建模。 通过链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟,得到了可靠的仿真结果。 统一变桨反馈信号是转速,独立变桨反馈是叶根载荷,这两种控制方式均满足要求。 电子资料,联系默认同意。
在风力发电领域,优化风电机组的控制策略对于提升发电效率和机组稳定性至关重要。今天咱们就来聊聊基于OpenFast与MATLAB SIMULINK联合仿真模型下,风电机组的独立变桨控制与统一变桨控制。
一、联合仿真模型搭建
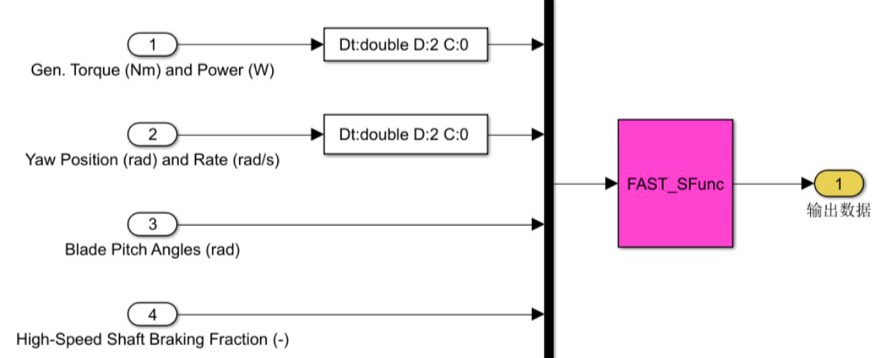
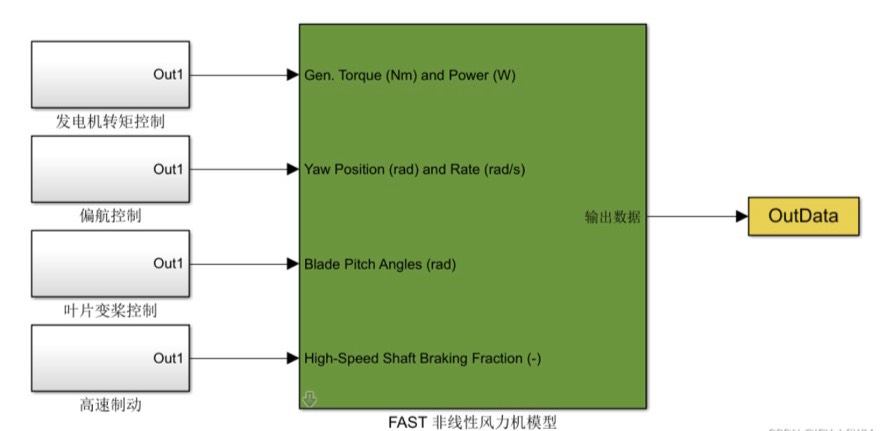
我们以陆地5MW非线性风机为研究对象,利用MATLAB SIMULINK软件结合openfast进行建模。在这个过程中,OpenFast主要负责模拟风机的空气动力学、结构动力学等复杂特性,而SIMULINK则专注于构建控制策略。
比如在连接两者时,我们可能会用到一些接口代码。假设我们在SIMULINK中创建一个S - Function来与OpenFast进行数据交互:
function [sys,x0,str,ts] = s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
% 初始化函数
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1; % 输出给OpenFast的数据
sizes.NumInputs = 1; % 从OpenFast接收的数据
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
% 输出函数
function sys=mdlOutputs(t,x,u)
sys(1) = u(1)*2; % 简单示例,对从OpenFast接收的数据进行处理再输出这段代码创建了一个简单的S - Function,它接收从OpenFast传来的数据(这里简单假设为一个标量),对其进行乘以2的处理后再输出给OpenFast,实际应用中数据处理会根据具体需求更加复杂。
二、独立变桨控制
独立变桨控制,其反馈信号是叶根载荷。这种控制方式能够针对每个叶片的不同受力情况进行精细化调整,从而更好地平衡风机的载荷。
在SIMULINK模型中,我们可以构建一个基于PID控制的独立变桨控制模块。
Kp = 0.5;
Ki = 0.1;
Kd = 0.05;
error = desired_load - measured_load; % 期望叶根载荷与实际测量叶根载荷的差值
integral = integral + error * dt;
derivative = (error - previous_error) / dt;
pitch_angle = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;上述代码片段展示了一个简单的PID控制算法来计算桨距角。通过不断调整桨距角,使得叶根载荷尽可能接近我们设定的期望值,从而优化风机的运行状态。
三、统一变桨控制
统一变桨控制的反馈信号是转速。这种控制方式相对简单,它基于风机整体的转速情况来统一调整所有叶片的桨距角。
openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制。 独立变桨控制。 OpenFast联合仿真。 风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型的非线性风力发电机的PID独立变桨和统一变桨控制下仿真模型。 陆地5MW非线性风机进行控制,利用MATLAB SIMULINK软件结合openfast进行建模。 通过链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟,得到了可靠的仿真结果。 统一变桨反馈信号是转速,独立变桨反馈是叶根载荷,这两种控制方式均满足要求。 电子资料,联系默认同意。
同样在SIMULINK中构建统一变桨的PID控制模块:
Kp_speed = 0.3;
Ki_speed = 0.08;
Kd_speed = 0.03;
speed_error = desired_speed - measured_speed; % 期望转速与实际测量转速的差值
speed_integral = speed_integral + speed_error * dt;
speed_derivative = (speed_error - previous_speed_error) / dt;
collective_pitch_angle = Kp_speed * speed_error + Ki_speed * speed_integral + Kd_speed * speed_derivative;
previous_speed_error = speed_error;这里通过PID算法根据转速误差来计算统一的桨距角,确保风机转速稳定在期望范围内。
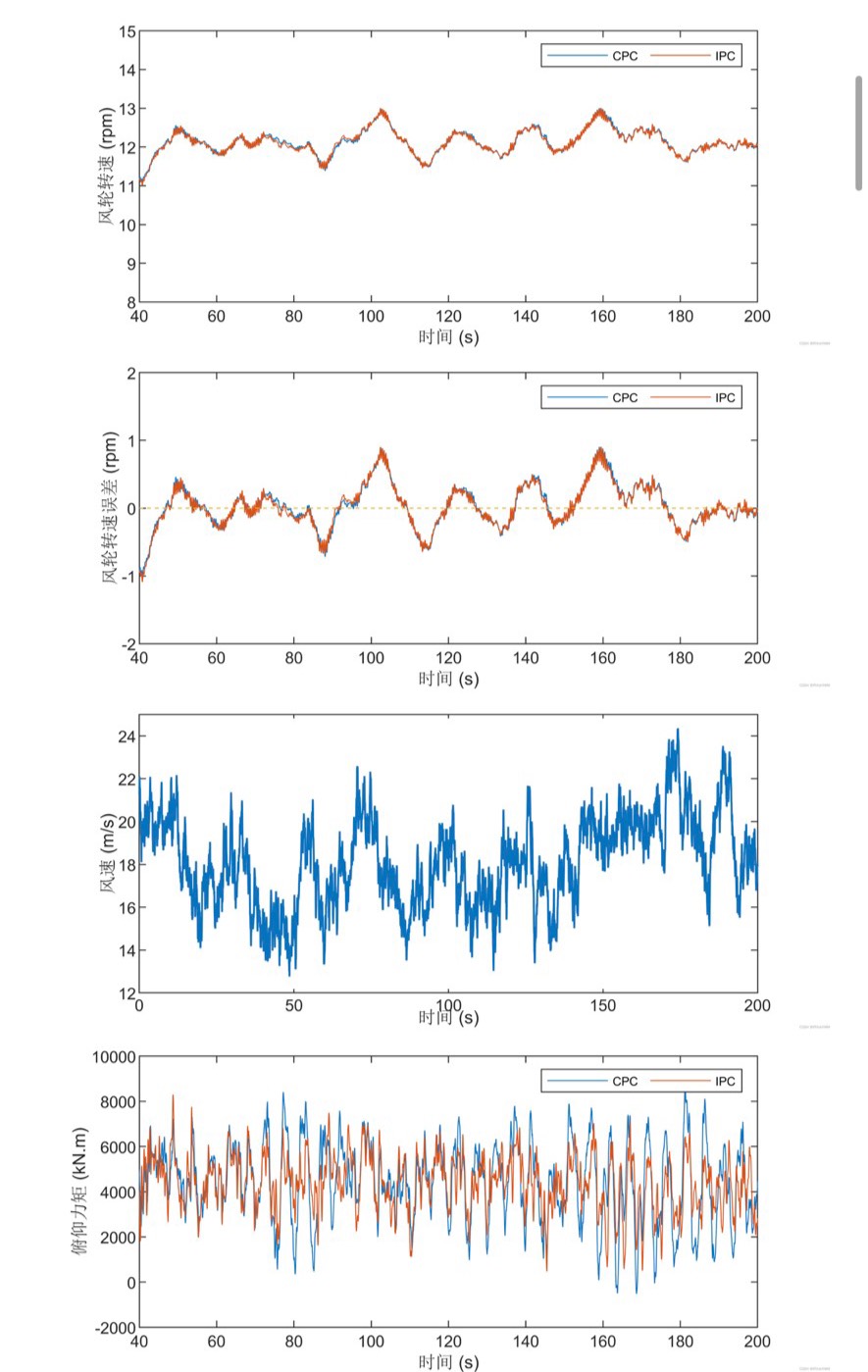
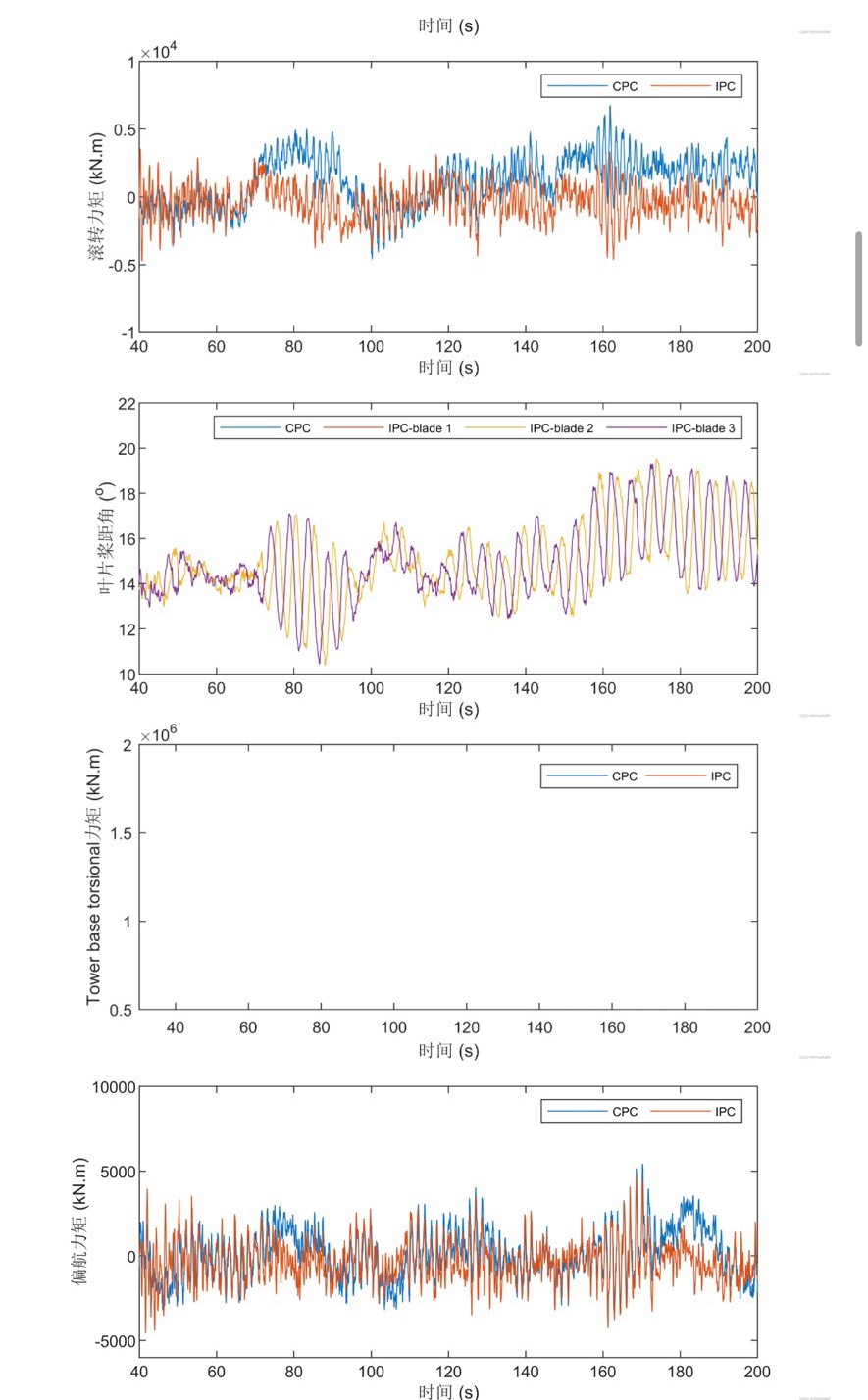
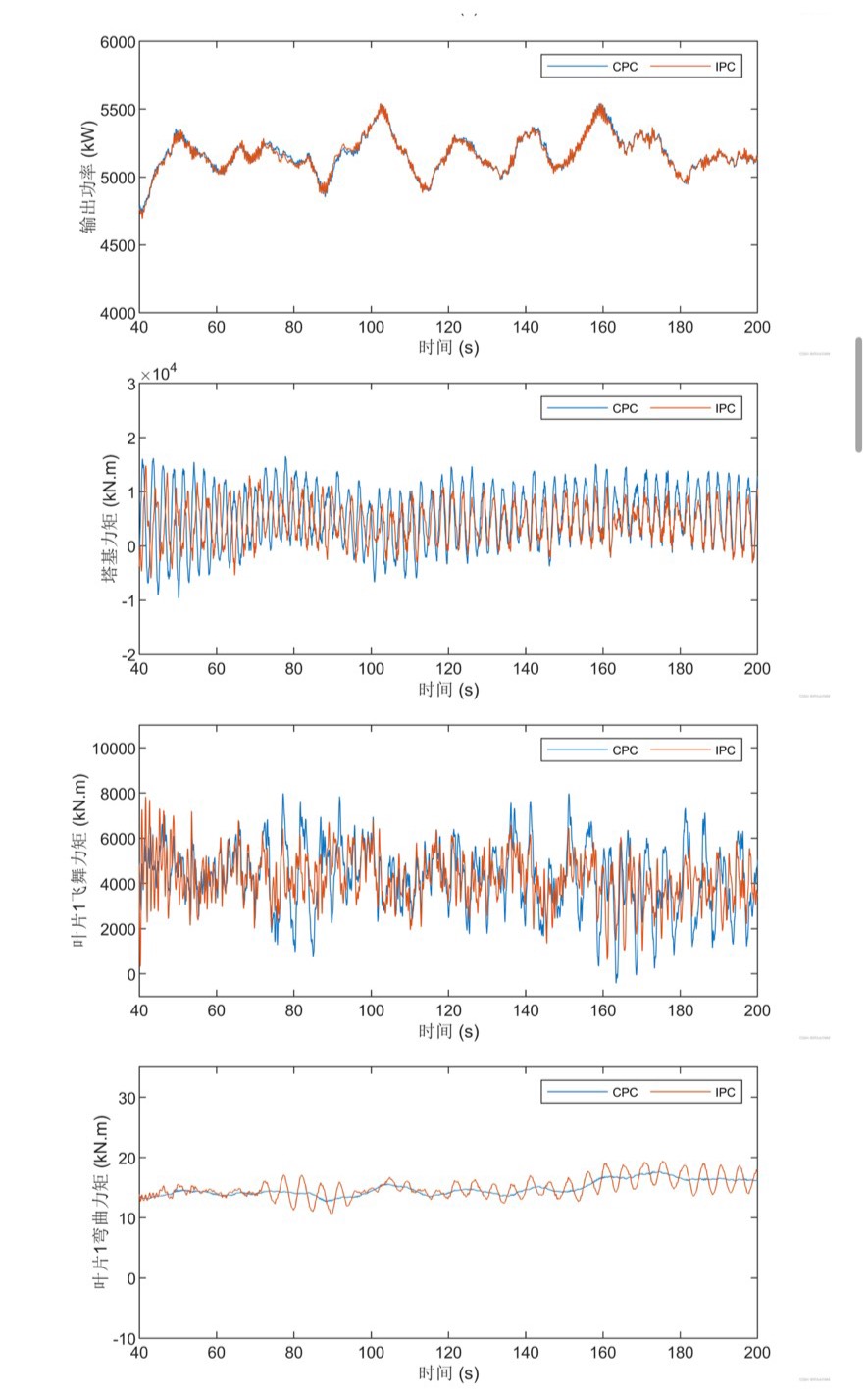
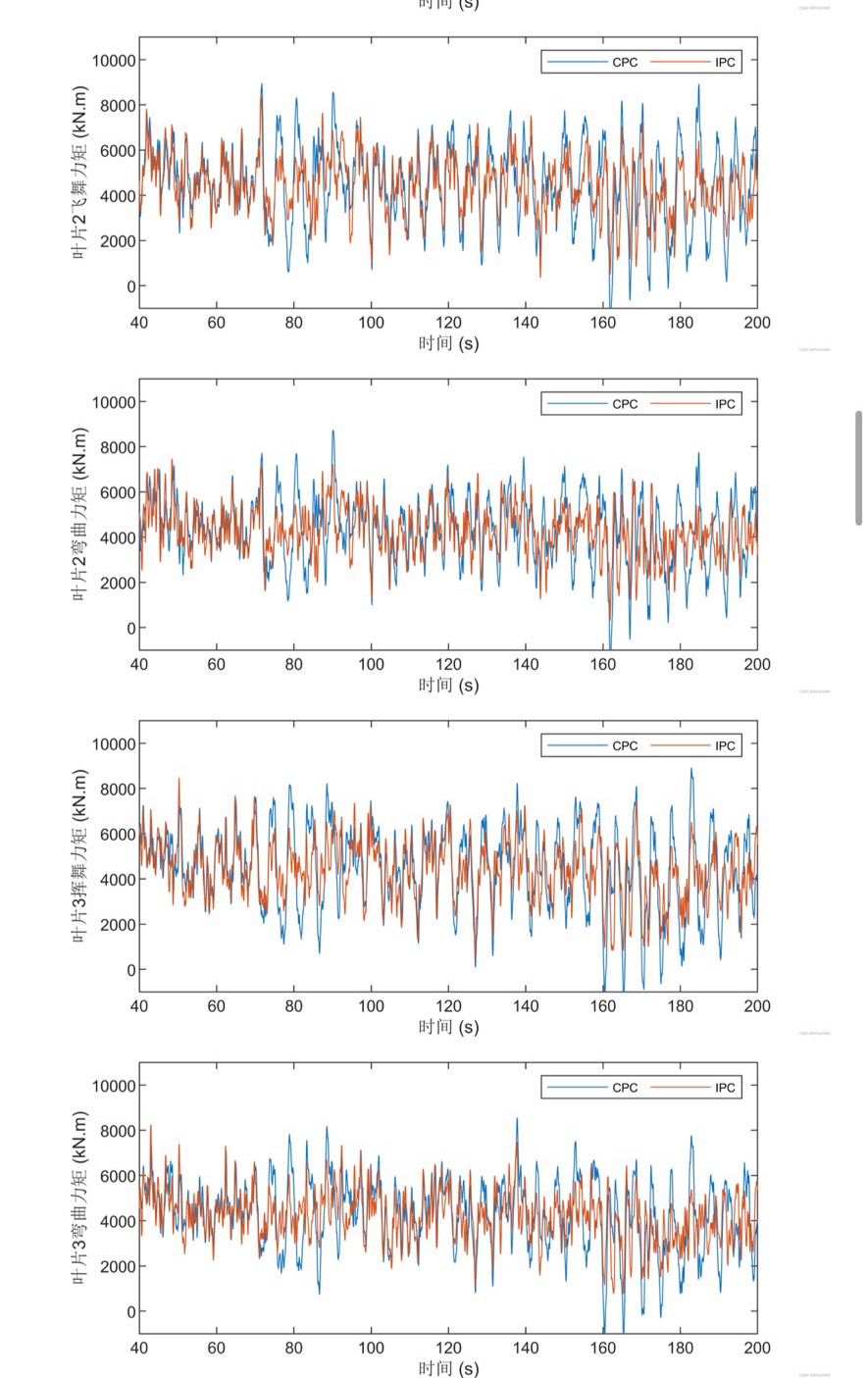
四、仿真结果分析
我们在trubsim生成的3D湍流风环境下进行模拟。通过链接simulink的scope输出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图。从这些对比图中可以清晰地看到,无论是独立变桨控制还是统一变桨控制,都能满足风电机组运行的基本要求。独立变桨控制在平衡叶片载荷方面表现出色,而统一变桨控制则在维持风机整体转速稳定上发挥了重要作用。
总之,通过OpenFast与SIMULINK的联合仿真,我们能够深入研究不同变桨控制策略对风电机组性能的影响,为实际风电场的运行和优化提供有力的支持。
电子资料,联系默认同意。如果大家对相关资料感兴趣,欢迎联系交流。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献37条内容
已为社区贡献37条内容

所有评论(0)