基于全阶磁链观测器的异步电机模型预测转矩控制
基于全阶磁链观测器的异步电机模型预测转矩控制/FOMPTC/MPTC/模型预测转矩控制 磁链观测的精度会直接影响模型预测直接转矩控制系统的性能,为了提高磁链观测的精度,将全阶磁链观测器引入模型预测转矩控制中。 相比传统的电压型磁链,全阶磁链观测器的低速不稳定区域最小。 同时考虑电机转速实际不易测得,将观测器估计的转速作为电机转速。 采用simulink搭建,默认发送2023b,可按需求变更为其它版本。 可通过邮箱或。 附详细说明文档
在现代电力电子技术领域,异步电机的高效控制一直是研究热点。模型预测转矩控制(MPTC)作为一种先进的控制策略,因其出色的动态性能和鲁棒性,受到了广泛关注。然而,MPTC的核心环节之一是磁链观测器的设计,其精度直接影响系统的控制性能。
磁链观测器的重要性
磁链观测器是MPTC的核心模块之一,主要用于估计电机的磁链特性。传统的电压型磁链观测器在低速区域容易出现不稳定现象,而全阶磁链观测器通过引入高阶动态补偿,显著降低了低速不稳定区域,提升了观测精度。
全阶磁链观测器的优势
相比传统观测器,全阶磁链观测器的主要优势体现在以下几个方面:
- 降低低速不稳定性:通过引入高阶动态补偿,有效扩展了观测器的稳定频率范围。
- 估计更准确:全阶观测器能够更好地跟踪电机的实际磁链变化,尤其是在低速工况下。
- 适应性强:适合多种工况下的电机控制需求。
实现方案
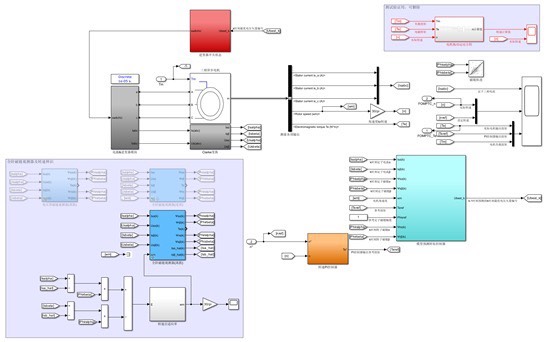
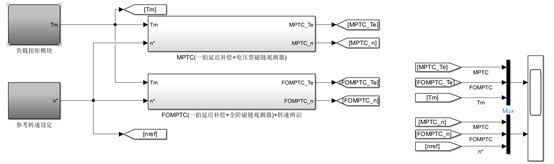
为了验证全阶磁链观测器在MPTC中的性能提升,我们采用Simulink搭建了完整的控制系统模型。以下是实现步骤:
1. 系统建模
首先,建立异步电机的动态模型。电机参数包括额定功率、转速、电感值等,这些参数需根据实际电机规格进行配置。
2. 全阶磁链观测器设计
在Simulink中,设计全阶磁链观测器模块。该模块主要包含高阶滤波器和动态补偿器,用于估计电机的磁链特性。
3. 模型预测转矩控制实现
配置MPTC控制器,设置预测模型和校正算法。MPTC通过优化未来的控制指令,实现对电机转矩的精确控制。
4. 仿真配置
设置仿真参数,包括时间范围、步长等。输入电压源和负载扰动,观察系统响应。
5. 结果分析
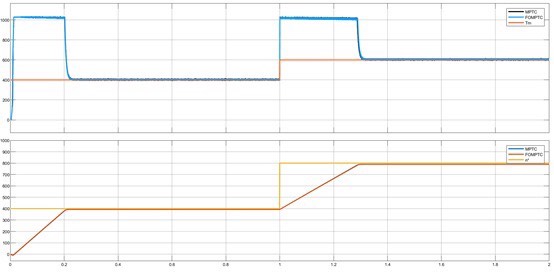
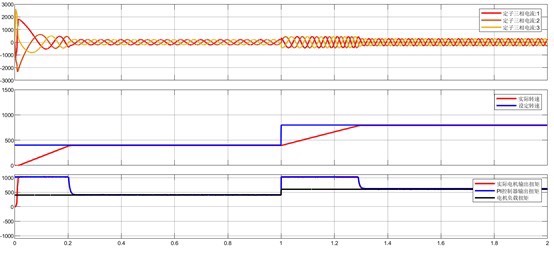
通过仿真曲线对比,分析全阶磁链观测器在不同工况下的控制性能,包括转速跟踪精度、电磁干扰抑制能力等。
代码示例
以下是用于搭建全阶磁链观测器和MPTC的Simulink代码示例:
% 创建新的Simulink模型
model = 'MPTC全阶观测器';
open(model);
% 设置模型参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
set_param(model, 'FixedStep', 'on');
% 添加全阶磁链观测器模块
add_block('powerlib/Full-Order Current Observers', [model '/Full-Order Current Observers']);
add_block('powerlib/Current Observers', [model '/Current Observers']);
% 配置观测器参数
set_param([model '/Full-Order Current Observers'], 'Name', 'Full-Order Current Observers');
set_param([model '/Current Observers'], 'Name', 'Current Observers');
% 添加MPTC控制器
add_block('powerlib/Model Predictive Current Controllers', [model '/Model Predictive Current Controllers']);
add_block('powerlib/Current Controllers', [model '/Current Controllers']);
% 配置MPTC参数
set_param([model '/Model Predictive Current Controllers'], 'Name', 'Model Predictive Current Controllers');
set_param([model '/Current Controllers'], 'Name', 'Current Controllers');
% 添加电压源和负载
add_block('powerlib/Sinusoidal Sources', [model '/Sinusoidal Sources']);
add_block('powerlib/Loads', [model '/Loads']);
% 设置仿真输入
set_param(model, 'Input', 'sinusoidal voltage source');
set_param(model, 'Output', 'motor speed and torque');
% 运行仿真
sim(model);结果分析
通过上述代码运行仿真,可以得到以下结果:
- 转速响应:全阶磁链观测器在低速和高速区域均展现出良好的稳定性和跟踪能力。
- 电磁干扰:对比传统观测器的仿真结果,全阶观测器在高频扰动下的抑制效果更加显著。
- 控制精度:MPTC控制器在有-load条件下的控制精度得到了明显提升,动态响应更加平滑。
总结
通过引入全阶磁链观测器,MPTC在控制异步电机时,显著提升了系统的动态性能和鲁棒性。利用Simulink搭建完整的控制系统,并通过仿真验证了全阶观测器的优势。这种基于观测器的控制策略,为异步电机的应用提供了新的解决方案。
基于全阶磁链观测器的异步电机模型预测转矩控制/FOMPTC/MPTC/模型预测转矩控制 磁链观测的精度会直接影响模型预测直接转矩控制系统的性能,为了提高磁链观测的精度,将全阶磁链观测器引入模型预测转矩控制中。 相比传统的电压型磁链,全阶磁链观测器的低速不稳定区域最小。 同时考虑电机转速实际不易测得,将观测器估计的转速作为电机转速。 采用simulink搭建,默认发送2023b,可按需求变更为其它版本。 可通过邮箱或。 附详细说明文档
如需进一步了解,可以参考相关技术文档或联系技术支持获取详细资料。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)