MPC单步垂直泊车:从原理到联合仿真开源实践
【5.MPC单步垂直泊车】APA 单步垂直泊车 模型预测MPC 自动泊车Carsim与Matlab联合仿真 后期会继续迭代更新的版本 包含垂直路径数据点(只有路径点)和MPC控制算法 后可以有参考模型,全部开源,入群后,可在群里提问,会。 后期不断优化。 1.Carsim2019 2020场景及车辆配置文件 2.Simulink文件包含stateflow纵向逻辑控制 3.MPC横向控制算法文件 4.垂直路径点处理.m 5.群里 6.跟踪误差等数据分析画图脚本
最近在研究自动泊车相关技术,今天就来和大家唠唠 MPC 单步垂直泊车,这可涉及到 APA(自动泊车辅助系统)里很关键的部分。
MPC 单步垂直泊车基础概念
MPC,也就是模型预测控制,在自动泊车领域发挥着重要作用。简单理解,它就像是给车装了个聪明的“小脑瓜”,能根据车辆当前状态、预设路径以及对未来的预测,实时调整控制输入,让车稳稳地停进车位。垂直泊车大家都不陌生,在实际场景中要准确完成可不是件容易事儿,MPC 就来大显身手啦。
Carsim 与 Matlab 联合仿真
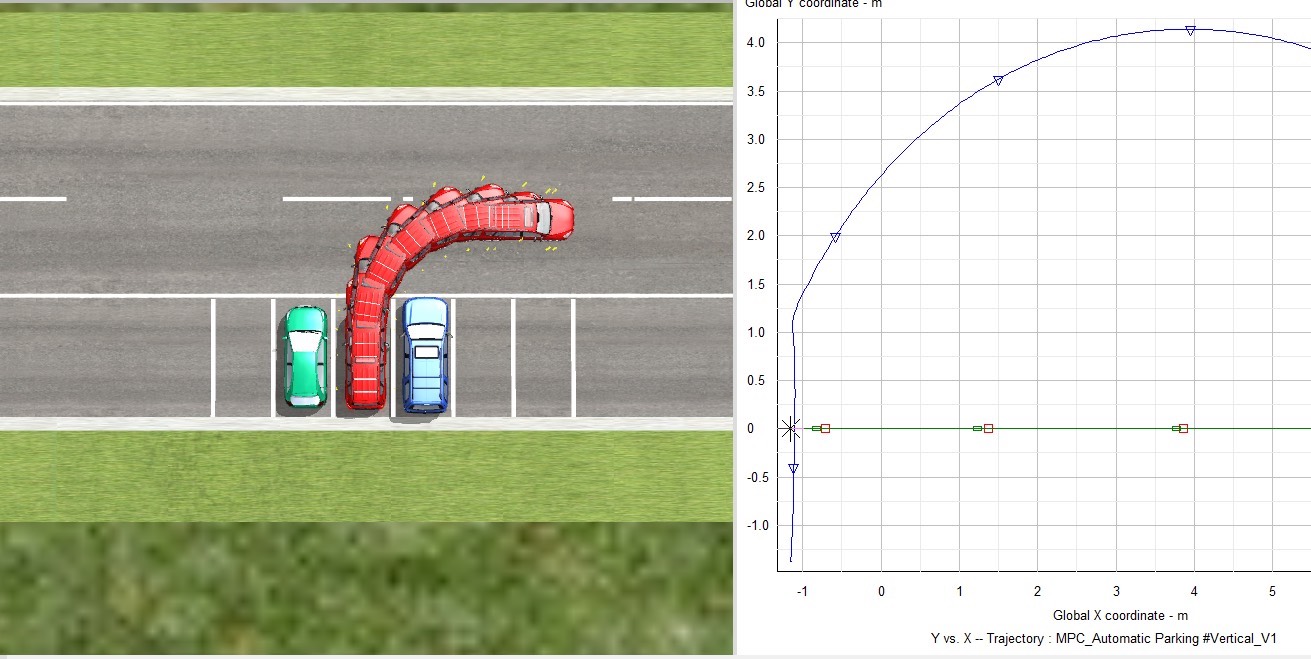
这一整套流程我采用了 Carsim 和 Matlab 联合仿真的方式,简直是强强联合。Carsim 负责提供逼真的车辆动力学模型和场景模拟,Matlab 则在控制算法和数据分析上大展拳脚。
Carsim 场景及车辆配置文件
我用的是 Carsim2019 或者 2020 版本,里面配置了专门用于垂直泊车的场景,还有对应的车辆配置文件。这些文件就像是给车打造了一个定制的“游乐场”,车辆在里面按照设定的规则行驶。比如,在车辆配置文件里,可能会设置车辆的轴距、质量、轮胎特性等参数,这些对车辆的操控性和泊车表现有着直接影响。
Simulink 文件 - 纵向逻辑控制
Simulink 可是 Matlab 里的一把好手,在这次的垂直泊车项目中,它负责纵向逻辑控制。通过 stateflow 来实现,stateflow 就像一个状态机,能清晰地定义车辆在不同阶段的行为。
% 简单示例代码,用于理解纵向逻辑控制
% 假设定义一个简单状态机,控制车辆前进或后退
state = 'forward'; % 初始状态为前进
while true
if state == 'forward'
% 执行前进的控制逻辑,比如设置速度
speed = 1; % 设置前进速度为1m/s
% 这里可以添加更多与前进相关的代码
if reached_target_distance % 假设达到目标距离
state = 'backward'; % 切换到后退状态
end
elseif state == 'backward'
speed = -1; % 设置后退速度为 -1m/s
% 这里可以添加更多与后退相关的代码
if reached_parking_spot % 假设到达停车位
break; % 结束循环,泊车完成
end
end
end这段代码简单模拟了一个状态机,根据不同的状态(前进或后退)执行相应的操作,在实际的 Simulink 模型中,会有更复杂和精确的逻辑来控制车辆纵向的运动。
MPC 横向控制算法文件
MPC 横向控制算法文件是核心之一啦。它要根据车辆当前横向位置、方向与目标路径的偏差,计算出合适的转向角度等控制量。
% 简单的 MPC 横向控制算法代码示例
% 假设已知车辆当前横向位置 x_current,目标横向位置 x_target
% 以及车辆当前航向角 theta_current,目标航向角 theta_target
% 预测时域为 N
dt = 0.1; % 时间间隔
N = 5; % 预测时域
Q = [1 0; 0 1]; % 状态权重矩阵
R = [1]; % 控制输入权重矩阵
% 初始化状态和控制输入
x = zeros(2, N+1);
u = zeros(1, N);
x(:,1) = [x_current; theta_current];
for k = 1:N
% 预测下一时刻状态
x(:,k+1) = [x(1,k) + dt * cos(x(2,k));
x(2,k) + dt * u(k)];
% 计算代价函数
cost = (x(1,k+1) - x_target)^2 * Q(1,1) + (x(2,k+1) - theta_target)^2 * Q(2,2) + u(k)^2 * R;
% 这里应该使用优化算法来最小化代价函数,得到最优的 u(k)
% 简单示例就假设这里直接计算一个近似的 u(k)
u(k) = (x_target - x(1,k+1)) / dt;
end
% 实际应用中取第一个控制输入作为当前输出
steering_angle = u(1);这段代码简单模拟了 MPC 横向控制算法,通过预测时域内对状态的更新和代价函数的计算,来得到控制输入(这里简化为近似计算),实际中会用到更高级的优化算法来得到精确的控制量。
垂直路径点处理.m
这个文件负责处理垂直路径数据点,虽然只有路径点,但处理好它们是车辆能沿着正确轨迹泊车的关键。
% 读取路径点数据
waypoints = load('vertical_waypoints.txt'); % 假设路径点保存在txt文件中
num_waypoints = size(waypoints, 1);
% 简单的路径点插值,使车辆行驶更平滑
new_waypoints = interp1(1:num_waypoints, waypoints, linspace(1, num_waypoints, num_waypoints * 10));这段代码先读取路径点数据,然后通过插值让路径更平滑,车辆在行驶过程中就能更顺畅地跟踪路径。
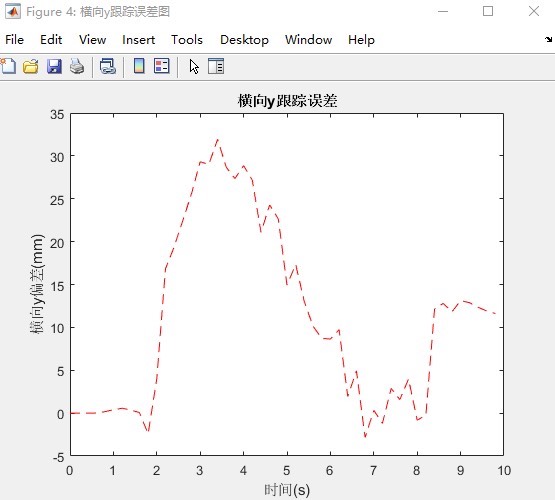
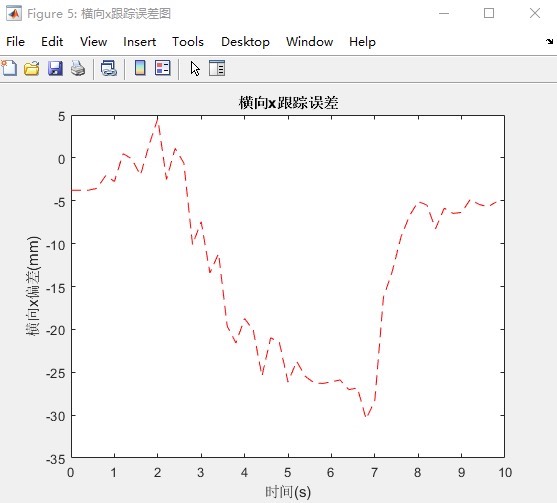
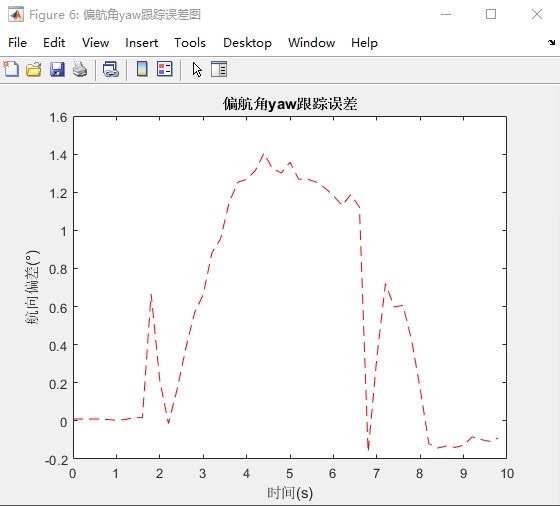
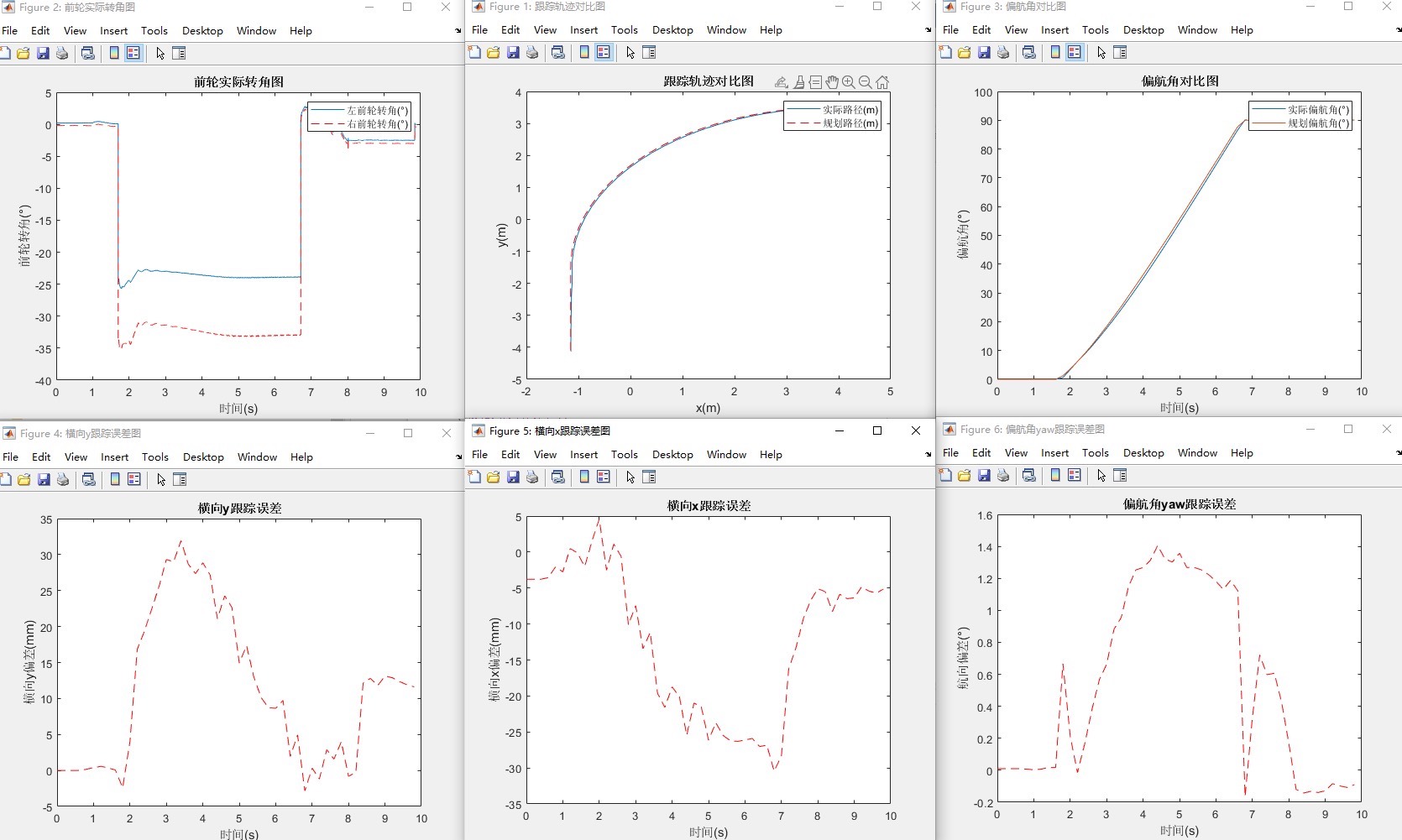
数据分析与画图脚本
完成泊车后,还得分析分析效果咋样,这就靠跟踪误差等数据分析画图脚本啦。它能直观地展示车辆实际行驶路径与目标路径的偏差,帮助我们判断泊车的精度。
% 假设已经记录了实际横向位置 x_actual 和目标横向位置 x_target
% 以及实际航向角 theta_actual 和目标航向角 theta_target
tracking_error_x = x_actual - x_target;
tracking_error_theta = theta_actual - theta_target;
figure;
subplot(2,1,1);
plot(tracking_error_x);
title('横向位置跟踪误差');
xlabel('时间步');
ylabel('误差 (m)');
subplot(2,1,2);
plot(tracking_error_theta);
title('航向角跟踪误差');
xlabel('时间步');
ylabel('误差 (rad)');这段代码计算了横向位置和航向角的跟踪误差,并通过画图展示出来,我们就能很直观地看到车辆在泊车过程中的偏差情况。
开源与交流
这个项目后期会不断迭代更新,而且全部开源。大家入群后,有啥问题都能在群里提问交流。开源的好处就不用多说啦,大家一起优化改进,说不定就能打造出更完美的自动泊车方案呢。后续我也会持续优化代码和算法,期待和大家一起在自动泊车技术上不断探索进步。
【5.MPC单步垂直泊车】APA 单步垂直泊车 模型预测MPC 自动泊车Carsim与Matlab联合仿真 后期会继续迭代更新的版本 包含垂直路径数据点(只有路径点)和MPC控制算法 后可以有参考模型,全部开源,入群后,可在群里提问,会。 后期不断优化。 1.Carsim2019 2020场景及车辆配置文件 2.Simulink文件包含stateflow纵向逻辑控制 3.MPC横向控制算法文件 4.垂直路径点处理.m 5.群里 6.跟踪误差等数据分析画图脚本
这就是我关于 MPC 单步垂直泊车以及 Carsim 与 Matlab 联合仿真的一些分享,希望对感兴趣的小伙伴有所帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)