探索两相交错并联buck变换器的奇妙世界
两相交错并联buck变换器 两相交错并联buck/boost变换器仿真 采用4mos结构,模型内包含开环,电压单环,电压电流双闭环三种控制方式,降压比为4(可调),里面有注解每种控制模式怎么连接手动开关。 输出波形好,电压纹波小。 三种方式中,双环控制模式的电感电流均流效果好 另也有单向结构,两个mos,两个diode。 同样地,里面包含上述三种控制方式 运行环境有matlab/simulink/plecs
在电力电子领域,两相交错并联buck变换器以及buck/boost变换器有着独特的魅力和广泛的应用。今天就来和大家深入探讨一下与之相关的仿真研究。
变换器结构
本次研究采用了两种结构,一种是4mos结构,另一种是单向结构(两个mos,两个diode)。
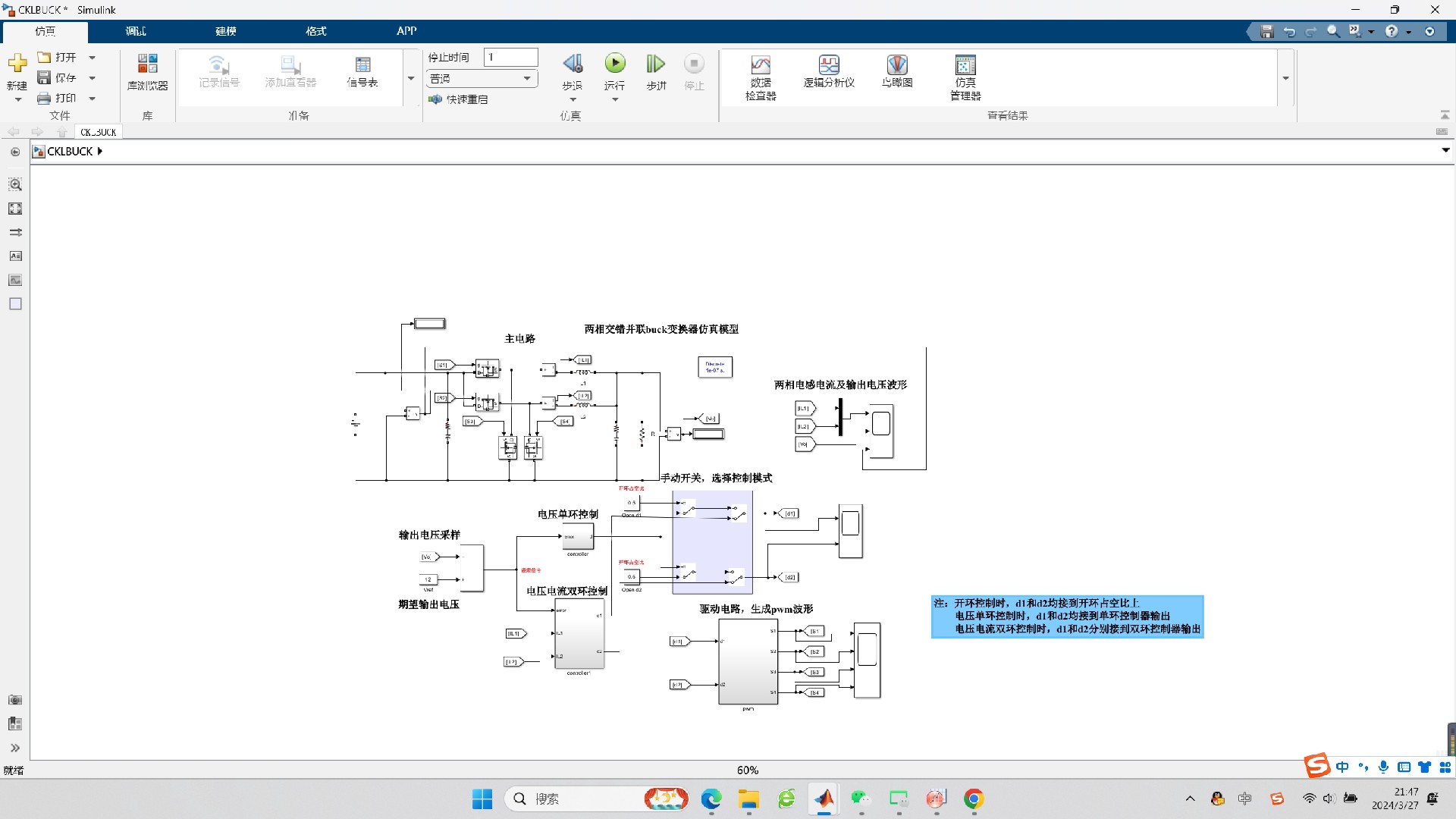
4mos结构
这种结构更为复杂但功能强大,它是实现多种控制方式的基础。在Matlab/Simulink/PLECS搭建模型时,这个结构就像是搭建一座复杂建筑的框架。
单向结构
相对简单一些,仅由两个mos和两个diode构成。别看它结构简单,同样具备强大的控制功能,就像精巧的小工具,在特定场景下也能发挥大作用。
控制方式
模型内包含开环,电压单环,电压电流双闭环三种控制方式。这三种控制方式就像是不同的驾驶模式,根据需求可以灵活切换。
开环控制
开环控制相对直接,没有反馈机制。就像一辆按照固定路线行驶的车,不管路上情况如何都不会改变方向。在代码实现上,可能类似这样(以下代码为示意,非实际可运行代码):
% 开环控制下的buck变换器参数设定
Vin = 100; % 输入电压
D = 0.25; % 占空比,对应降压比4
% 通过占空比和输入电压计算输出电压
Vout = Vin * D; 这里简单通过设定占空比来确定输出电压,不考虑实际输出电压的波动等情况。
电压单环控制
电压单环控制引入了对输出电压的反馈。好比开车的时候可以根据车速反馈来调整油门,使车速更稳定。代码实现上会增加对输出电压的检测和调整环节:
% 电压单环控制参数
Vin = 100;
Vref = 25; % 参考输出电压,降压比4时,对应输入100V输出25V
error = 0;
Kp = 0.1; % 比例系数
Ki = 0.01; % 积分系数
integral = 0;
for i = 1:num_steps
Vout = Vin * D; % 当前输出电压
error = Vref - Vout;
integral = integral + error;
D = D + Kp * error + Ki * integral; % 根据误差调整占空比
end这里通过不断检测输出电压与参考电压的误差,利用比例积分控制来调整占空比,从而稳定输出电压。
电压电流双闭环控制
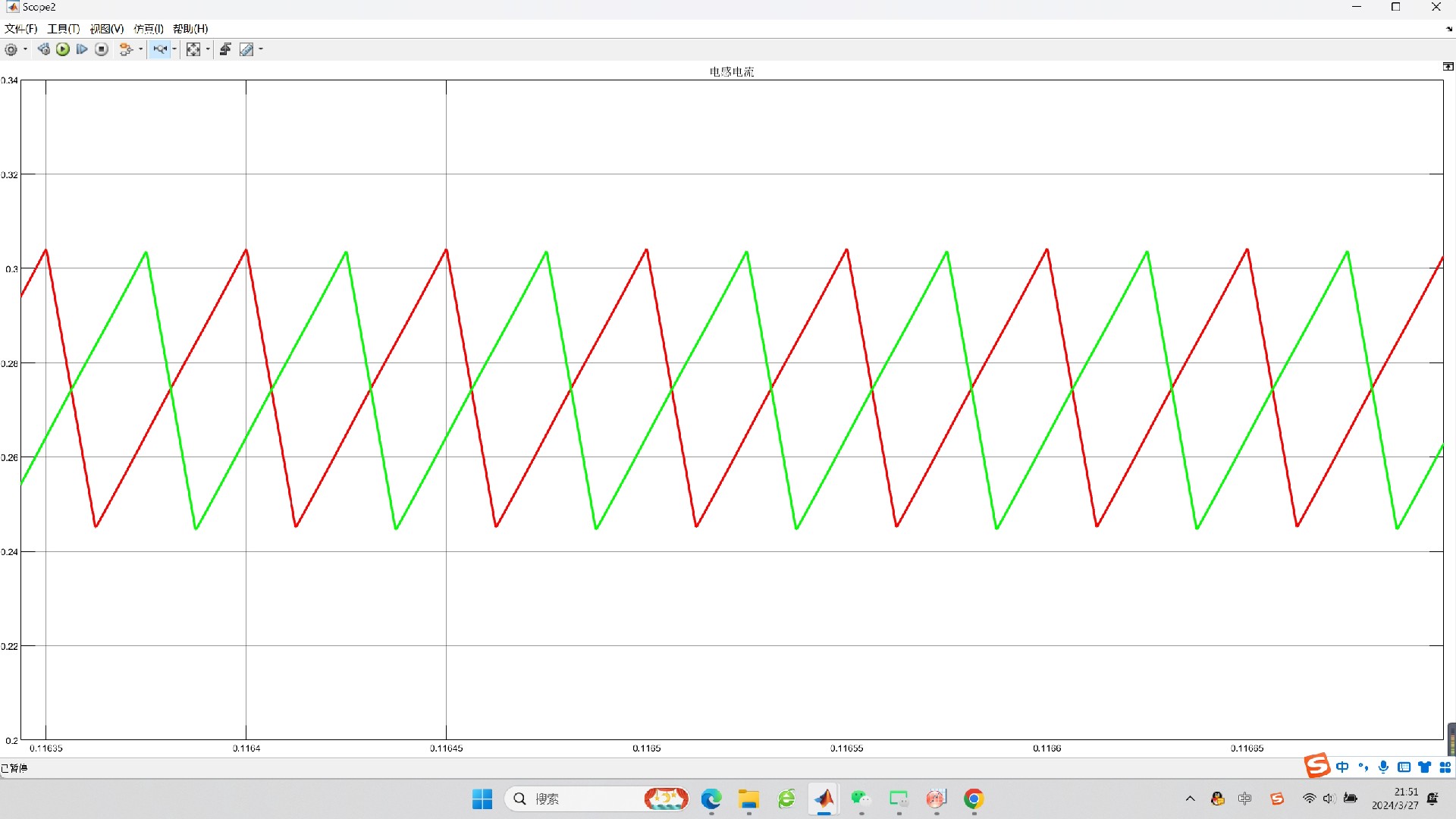
双环控制模式就更高级了,除了电压环,还加入了电流环。这相当于开车不仅要控制车速,还要考虑发动机的负荷,使整个系统运行更加稳定高效。在这种控制方式下,电感电流均流效果好。代码实现会更加复杂:
% 电压电流双闭环控制参数
Vin = 100;
Vref = 25;
Iref = 1; % 参考电流
Kp_voltage = 0.1;
Ki_voltage = 0.01;
Kp_current = 0.05;
Ki_current = 0.005;
voltage_error = 0;
current_error = 0;
voltage_integral = 0;
current_integral = 0;
for i = 1:num_steps
Vout = Vin * D;
Iout = calculate_current(Vout); % 假设此函数计算输出电流
voltage_error = Vref - Vout;
current_error = Iref - Iout;
voltage_integral = voltage_integral + voltage_error;
current_integral = current_integral + current_error;
% 先根据电流误差调整内环,再根据电压误差调整外环
D_current = D + Kp_current * current_error + Ki_current * current_integral;
D = D_current + Kp_voltage * voltage_error + Ki_voltage * voltage_integral;
end这里先通过电流环对电流进行调整,再结合电压环进一步优化,使得系统性能更好。
降压比与手动开关连接
降压比为4且可调,这为实际应用提供了很大的灵活性。每种控制模式通过手动开关连接,在模型搭建时,可以这样设置(以Simulink为例):在不同控制模块之间设置多路选择开关(Mux),通过手动改变开关的状态来切换控制模式。比如,在Simulink中可以将开环、电压单环、电压电流双闭环的输出连接到Mux的不同输入端口,再通过一个手动控制的信号来选择对应的控制模式输出到buck变换器模型。
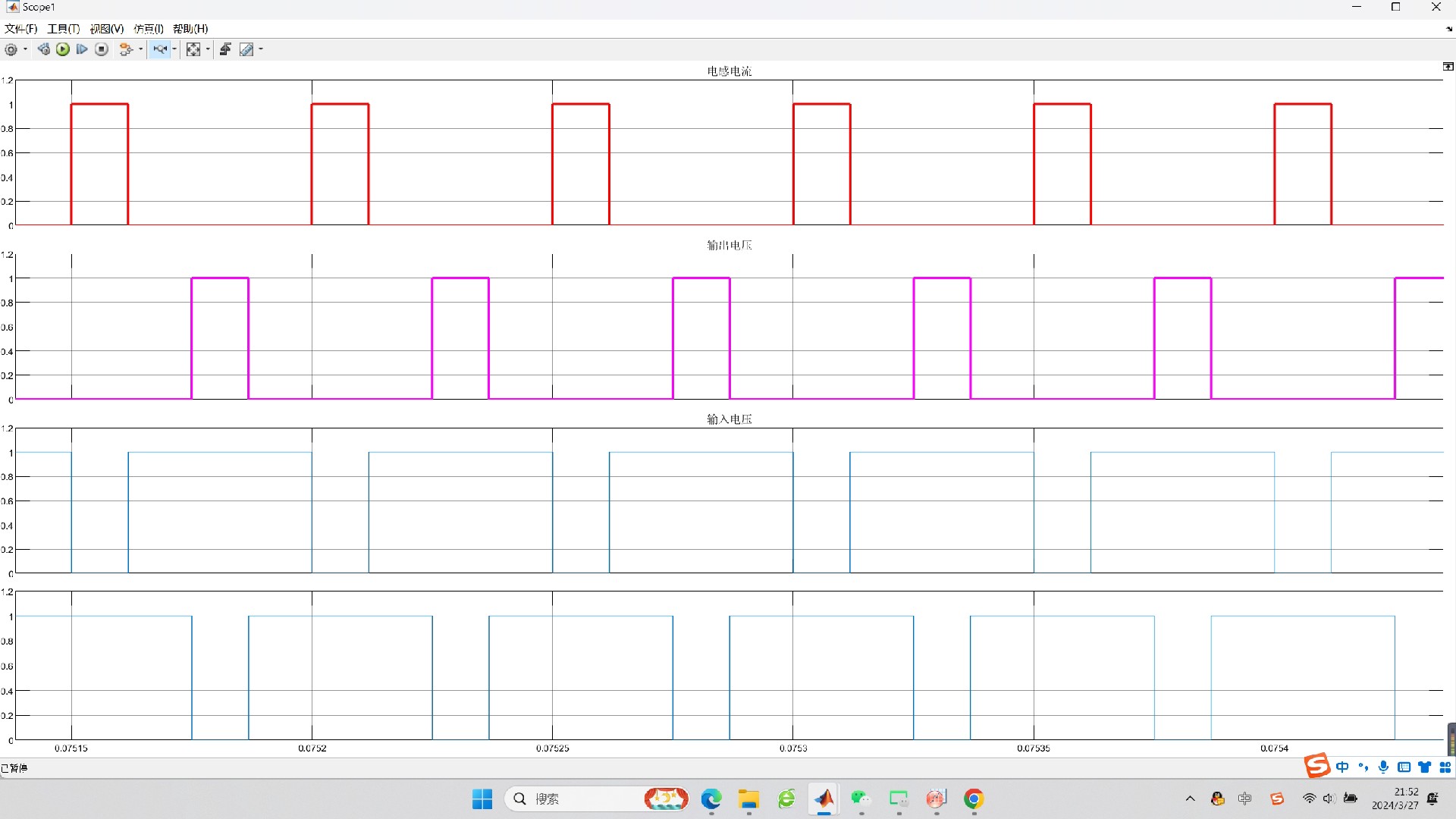
仿真结果
仿真结果令人满意,输出波形好,电压纹波小。特别是在三种方式中,双环控制模式展现出了优异的电感电流均流效果。这使得在多相并联运行时,各个相的电感电流能够均匀分配,减少了系统的损耗和发热,提高了系统的可靠性和效率。
两相交错并联buck变换器 两相交错并联buck/boost变换器仿真 采用4mos结构,模型内包含开环,电压单环,电压电流双闭环三种控制方式,降压比为4(可调),里面有注解每种控制模式怎么连接手动开关。 输出波形好,电压纹波小。 三种方式中,双环控制模式的电感电流均流效果好 另也有单向结构,两个mos,两个diode。 同样地,里面包含上述三种控制方式 运行环境有matlab/simulink/plecs
在Matlab/Simulink/PLECS的运行环境下,我们可以方便地对这些变换器模型进行搭建、仿真和分析。无论是复杂的4mos结构还是简单的单向结构,都能在这个平台上充分展现其特性。希望通过今天的分享,能让大家对两相交错并联buck变换器以及相关控制方式有更深入的理解,在实际项目中能够更好地运用这些知识。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)