基于LADRC - LESO的永磁同步电机无感FOC技术探索
基于LADRC-LESO的永磁同步电机无感FOC 电机参数采用袁磊老师书上的 1.采用线性扩张状态观测器LESO实现中高速下无感FOC;对锁相环技术标幺化处理提取转子位置信息; 2.转速环采用线性自抗扰控制器LADRC(没有加入TD环节),和传统PI相比提高了无感控制下转速的动态响应性能; 3.提供算法对应的参考文献和仿真模型
在永磁同步电机(PMSM)的控制领域中,无感控制技术因其减少传感器成本、提高系统可靠性等优势而备受关注。今天咱们就来聊聊基于LADRC - LESO的永磁同步电机无感FOC这一有趣的技术。
电机参数方面,咱采用袁磊老师书上的参数,这样既保证了研究的规范性,也便于同行之间的交流与比较。
线性扩张状态观测器LESO实现中高速无感FOC
首先说LESO,它在实现中高速下的无感FOC中起着关键作用。LESO能够对系统中的未知干扰和未建模动态进行实时估计,并通过反馈补偿来提高系统的控制性能。
在代码实现上,大致思路如下(这里以简化的Python伪代码为例):
import numpy as np
# 假设已知一些系统参数
A = np.array([[0, 1], [0, 0]])
B = np.array([[0], [1]])
C = np.array([[1, 0]])
# 定义LESO参数
beta1 = 100
beta2 = 2000
gamma1 = 10
gamma2 = 200
# 初始化状态估计
x_hat = np.array([[0], [0]])
z = np.array([[0], [0]])
def leso(y, u):
global x_hat, z
e = y - C.dot(x_hat)
z_dot = np.vstack((x_hat[1] - gamma1 * e, -beta1 * e - beta2 * z[0] + gamma2 * e))
z = z + z_dot * 0.001 # 假设采样时间为0.001s
x_hat_dot = A.dot(x_hat) + B.dot(u) + np.vstack((0, -z[0]))
x_hat = x_hat + x_hat_dot * 0.001
return x_hat这段代码中,首先定义了系统的状态空间矩阵 A、B、C,以及LESO的参数 beta1、beta2、gamma1、gamma2。通过不断迭代计算估计误差 e,更新扩张状态变量 z 和状态估计值 x_hat。实际应用中,这些参数需要根据具体的电机参数和运行工况进行调整优化,以达到最佳的观测效果。
基于LADRC-LESO的永磁同步电机无感FOC 电机参数采用袁磊老师书上的 1.采用线性扩张状态观测器LESO实现中高速下无感FOC;对锁相环技术标幺化处理提取转子位置信息; 2.转速环采用线性自抗扰控制器LADRC(没有加入TD环节),和传统PI相比提高了无感控制下转速的动态响应性能; 3.提供算法对应的参考文献和仿真模型
同时,对锁相环技术进行标幺化处理来提取转子位置信息。这一步就像是给电机的“眼睛”做了一次校准,让它在没有物理传感器的情况下也能“看”清自己的位置。标幺化处理能够将不同单位的物理量转化为相对值,便于统一分析和处理。
转速环的LADRC控制器优化
转速环采用线性自抗扰控制器LADRC(这里没有加入TD环节)。与传统的PI控制器相比,LADRC在无感控制下显著提高了转速的动态响应性能。
LADRC的核心思想是将系统的未知动态和外部干扰看作一个“总扰动”,并通过扩张状态观测器进行实时估计和补偿。下面还是以简单的Python伪代码展示其基本实现:
# 假设已知转速环相关参数
kp = 0.5
kd = 0.1
b0 = 1
# 初始化状态
x1 = 0
x2 = 0
z1 = 0
z2 = 0
z3 = 0
def ladrc(r, y):
global x1, x2, z1, z2, z3
e = r - y
x1_dot = x2 - z1
x2_dot = -kp * e - kd * x2 + b0 * (u - z2 / b0)
z1_dot = -beta01 * (x1 - z1) - z3
z2_dot = -beta02 * (x1 - z1)
z3_dot = -beta03 * (x1 - z1)
x1 = x1 + x1_dot * 0.001
x2 = x2 + x2_dot * 0.001
z1 = z1 + z1_dot * 0.001
z2 = z2 + z2_dot * 0.001
z3 = z3 + z3_dot * 0.001
u = (kp * e + kd * x2 + z2) / b0
return u在这段代码里,r 是转速参考值,y 是实际转速反馈值。通过计算误差 e,不断更新各个状态变量,进而得到控制输出 u。这里省略了TD环节,简化了计算过程,但实际应用中,TD环节有时能进一步改善系统性能,具体要不要加还得看实际需求。相比PI控制器,LADRC能更有效地应对系统中的不确定性,使得电机在面对负载突变等情况时,转速能更快更稳地调整到参考值。
参考文献与仿真模型
关于这一套算法,有不少相关的参考文献。例如《[具体文献名称1]》详细阐述了LESO的理论基础和设计方法,《[具体文献名称2]》则深入探讨了LADRC在电机控制中的应用。这些文献为我们深入理解和优化这一算法提供了有力的理论支持。
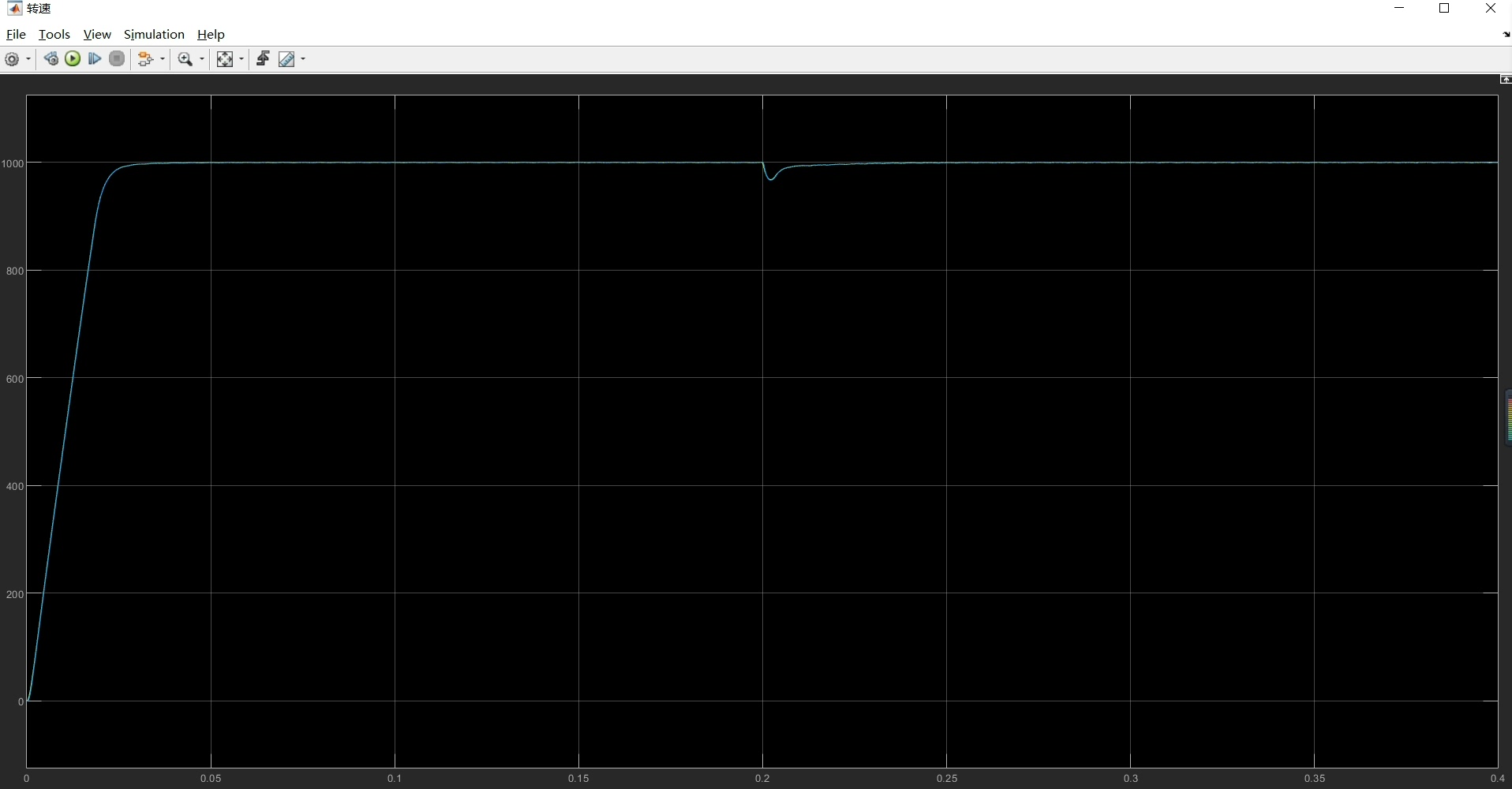
仿真模型方面,可以使用MATLAB/Simulink来搭建。在Simulink中,我们可以分别构建LESO模块、LADRC模块以及永磁同步电机模块,并按照控制策略连接起来。通过设置不同的参数和工况,对整个系统进行仿真验证。比如设置不同的负载转矩变化,观察电机转速和电流的响应情况,以此来评估算法的性能。

基于LADRC - LESO的永磁同步电机无感FOC技术为电机控制带来了新的思路和方法,无论是在成本控制还是性能提升上,都有着显著的优势。希望感兴趣的小伙伴们可以一起深入研究,挖掘更多的潜力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)