基于前车历史动力协作的交通流建模与仿真
导读:
在智能交通快速发展的背景下,自动驾驶车辆凭借较强的数据感知、存储与计算能力,为交通流稳定性优化提供了新的技术基础。在智能网联环境下,车辆不仅能够获取实时驾驶状态信息,还具备存储与利用历史运行数据的条件。现有研究多围绕实时状态信息开展协同控制,而对历史信息的系统化融合与稳定性机制分析仍有进一步拓展空间。基于此,本文提出了一种基于前车历史动力协作的汽车跟驰模型,该模型将前车历史动力信息纳入控制决策框架,通过滤波机制对加速度响应进行平滑处理,以抑制扰动传播。基于线性稳定性理论与数值仿真方法,对模型的稳定性特征进行了分析与验证。结果表明,在合理参数范围内,引入前车历史动力协作能够显著提升交通流整体稳定性,为交通流稳定性优化提供了一种新的微观控制思路。
作者信息:
未冬晴, 李志鹏:同济大学信息与通信工程系,上海;同济大学高速磁浮运载技术全国重点实验室,上海
论文详情
基于前车历史动力协作的跟驰模型构建
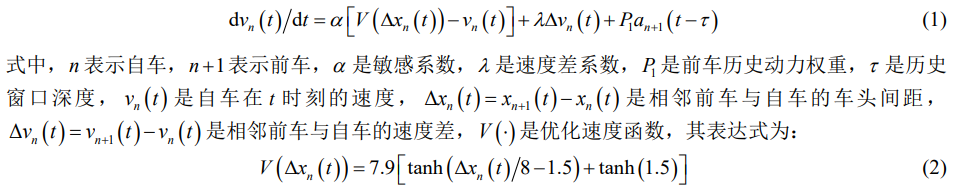
其数学表达式为:
跟驰模型的稳定性分析
1. 线性稳定性分析
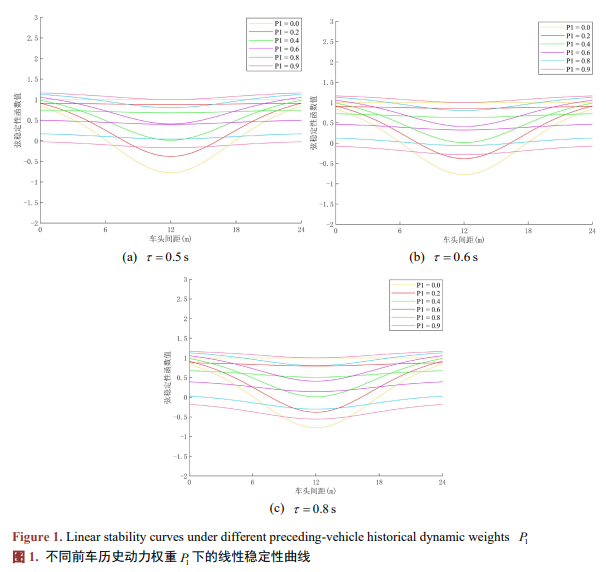
采用拉普拉斯变换的方法,对模型(1)在稳态运行点附近进行线性化处理,公式(7)给出了所建模的线性稳定性判定准则。当该稳定性条件满足时,交通扰动在车辆队列中的传播将逐渐衰减,该模型通过历史动力信息协作对扰动起到持续平滑作用,抑制速度与加速度波动。根据稳定性判定准则可以绘出系统的稳定性边界曲线。

结合图1(a)~(c)可以发现,在保持P1不变的条件下,历史窗口深度τ 的取值会显著影响系统稳定性边界,随着τ 的增加,对应的临界P1阈值逐渐减小。
2. 非线性稳定性分析
由mKdV方程得到的扭结–反扭结波解表明,当系统参数进一步进入不稳定区域后,交通流扰动的非线性演化机制由弱非线性主导转变为强非线性主导过程,此时扰动不再以局部波动形式传播,而是演化为具有明显界面结构的相态跃迁型波动模式。该扭结–非扭结结构刻画了车流状态在不同稳定相之间的空间过渡过程,对应交通流中“自由流–拥挤流”或“低密度–高密度”状态之间的转换。因此,从非线性动力学角度,历史动力协作机制通过调控强非线性演化阶段的结构波动态形态,实现了对交通流失稳过程的深层次干预,为从源头抑制交通激波形成、延缓拥堵结构发展提供了理论支撑。这为后续通过参数优化实现交通流稳定性奠定了非线性理论基础。
数值仿真验证
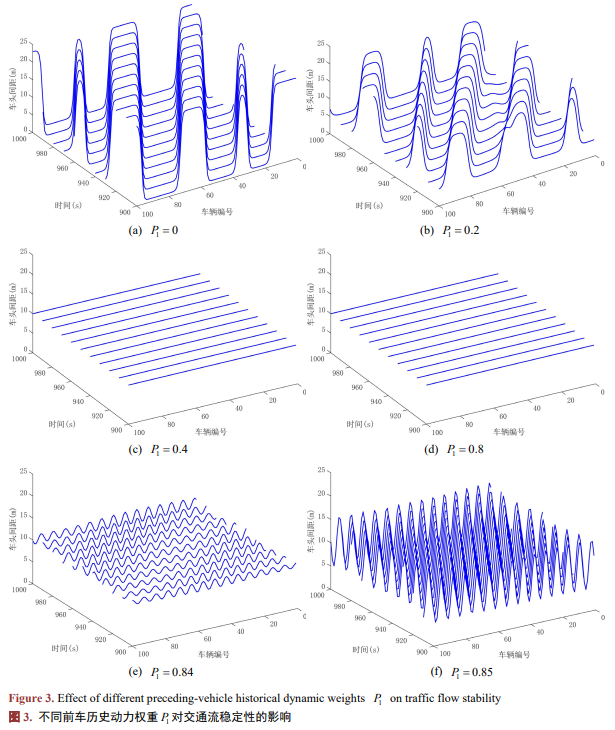
图3(a)~(f)展示了在历史窗口深度τ=0.5 s 条件下,不同前车历史动力权重P1 对交通流稳定性演化的影响。
从图5(c)可看出,当P1=0.7,τ=1.1 s 时,系统已出现明显的不稳定特征。上述对比结果表明,在保持系统稳定的前提下,不同前车历史动力权重P1 所对应的历史窗口深度τ 取值范围存在明显差异。随着前车历史动力权重P1 的增大,为维持交通流稳定运行,历史窗口深度τ 的允许上界逐渐减小。
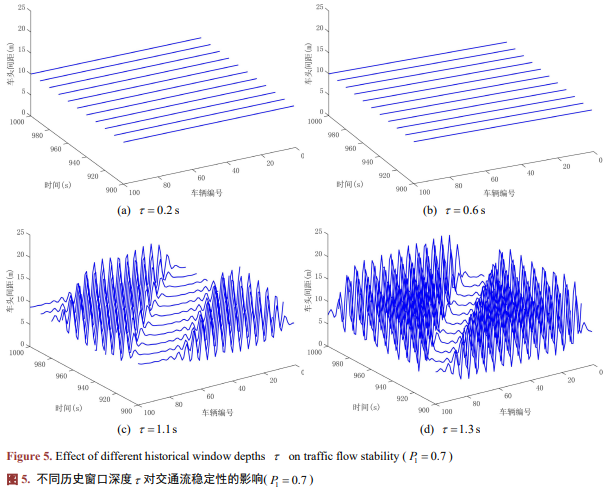
上述稳定性仿真结果表明,前车历史动力权重P1 与历史窗口深度τ 之间存在显著的耦合关系,并共同影响交通流的稳定性演化。适度引入前车历史动力信息,有助于平滑车辆加速度变化,抑制扰动在车流中的传播,从而提升交通流的整体稳定性。然而,较大的前车历史动力权重虽然能够增强加速度平滑效果,但同时也会放大历史动力信息所引入的时滞效应,降低系统对较大历史窗口的容忍度。当前车历史动力权重或历史窗口深度取值过大时,滞后效应逐渐占据主导,系统对扰动的响应能力明显削弱,进而导致交通流稳定性下降,重新出现“走走停停”现象。该结论与第3节中的线性稳定性分析结果相一致,从数值仿真的角度进一步验证了前车历史动力信息在提升系统稳定性与引入时滞效应之间存在的内在权衡关系。
结论
本文围绕交通流稳定性问题,在经典FVD模型基础上构建了基于前车历史动力协作的新型跟驰模型,并对其稳定性特征进行了系统分析。通过线性稳定性理论推导,揭示了前车历史动力信息对加速度扰动传播与演化过程的调节作用,阐明了关键参数对稳定性边界及扰动耗散能力的影响规律。数值仿真结果进一步验证了理论分析的有效性,表明在合理参数范围内,引入前车历史动力信息能够显著抑制速度与加速度波动,增强交通流对有限扰动的抵抗能力,从而提升整体运行稳定性。上述结果为模型参数优化与工程应用提供了理论支撑。
基金项目:
国家自然科学基金的资助(资助号:61773290);中央高校基础科研基金的资助(资助号:22120230311)
原文链接:

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)