无速度传感器DTC实战:让电机自己“报“转速
基于MRAS的异步电机直接转矩控制/基于转子磁链模型的MRAS转速辨识/基于反电动势模型的MRAS转速辨识/基于无功功率模型的MRAS转速辨识 在simulink搭建的异步电机模型预测转矩控制模型之上进行改进,把转速环中实际转速从测量值更换为MARS观测器的转速估计值,模拟了现实中电机无速度传感器的情况。 此模型内包含了基于转子磁链模型的、基于反电动势模型的、基于无功功率模型的MRAS转速辨识 附带说明文档,模型可直接运行、可调节,默认发送2023b版本的simulink模型,需要其它版本的备注一下;
在电机控制领域,直接转矩控制(DTC)就像给电机装上了"自动驾驶"系统。但现实中安装编码器不仅增加成本,还容易受干扰。今天咱们拆解一套用MRAS(模型参考自适应)当"转速侦探"的DTC方案,看看怎么让电机自己把转速"说"出来。
三大侦探的破案原理
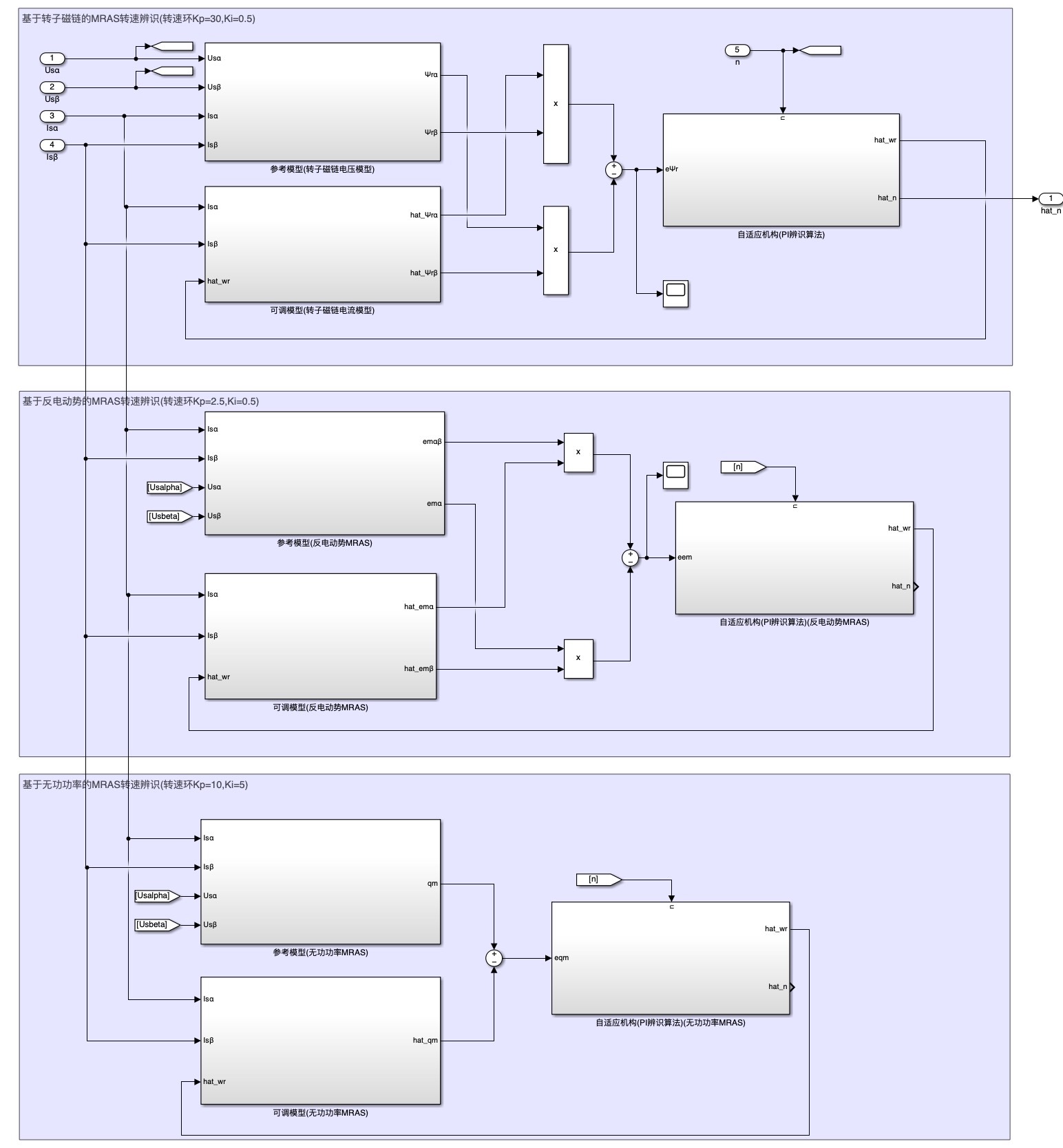
(此处应有模型结构示意图)
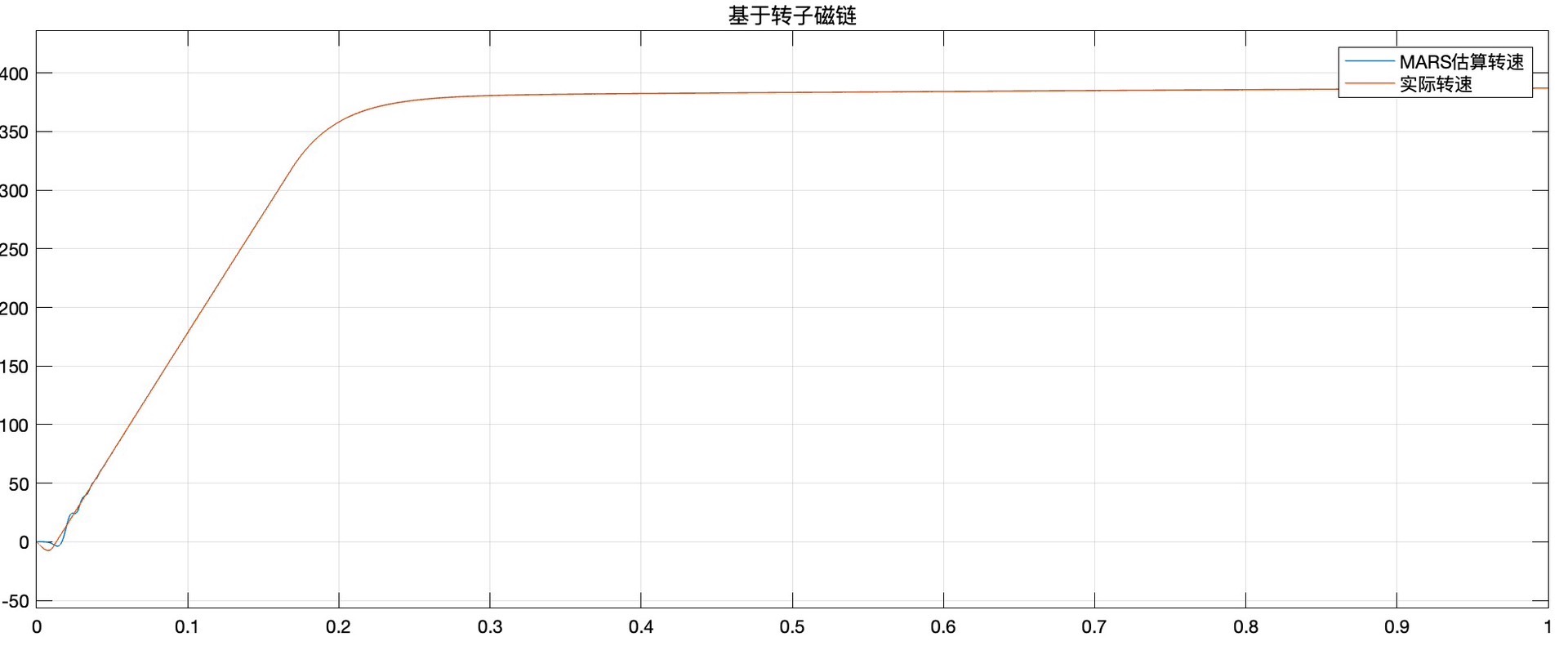
- 转子磁链派:通过比较电压模型和电流模型的磁链估计值差异,自适应律像调音师一样修正转速估计。核心代码中这个自适应律常表现为:
% 自适应律示例
function omega = adaptive_law(psi_r_ref, psi_r_est)
Kp = 0.5;
Ki = 10;
persistent integral;
error = psi_r_ref(1)*psi_r_est(2) - psi_r_ref(2)*psi_r_est(1);
integral = integral + error*0.0001; % 采样时间1e-4
omega = Kp*error + Ki*integral;
end这种PI形式的自适应律就像给系统装上了纠偏弹簧,误差越大修正力度越强。
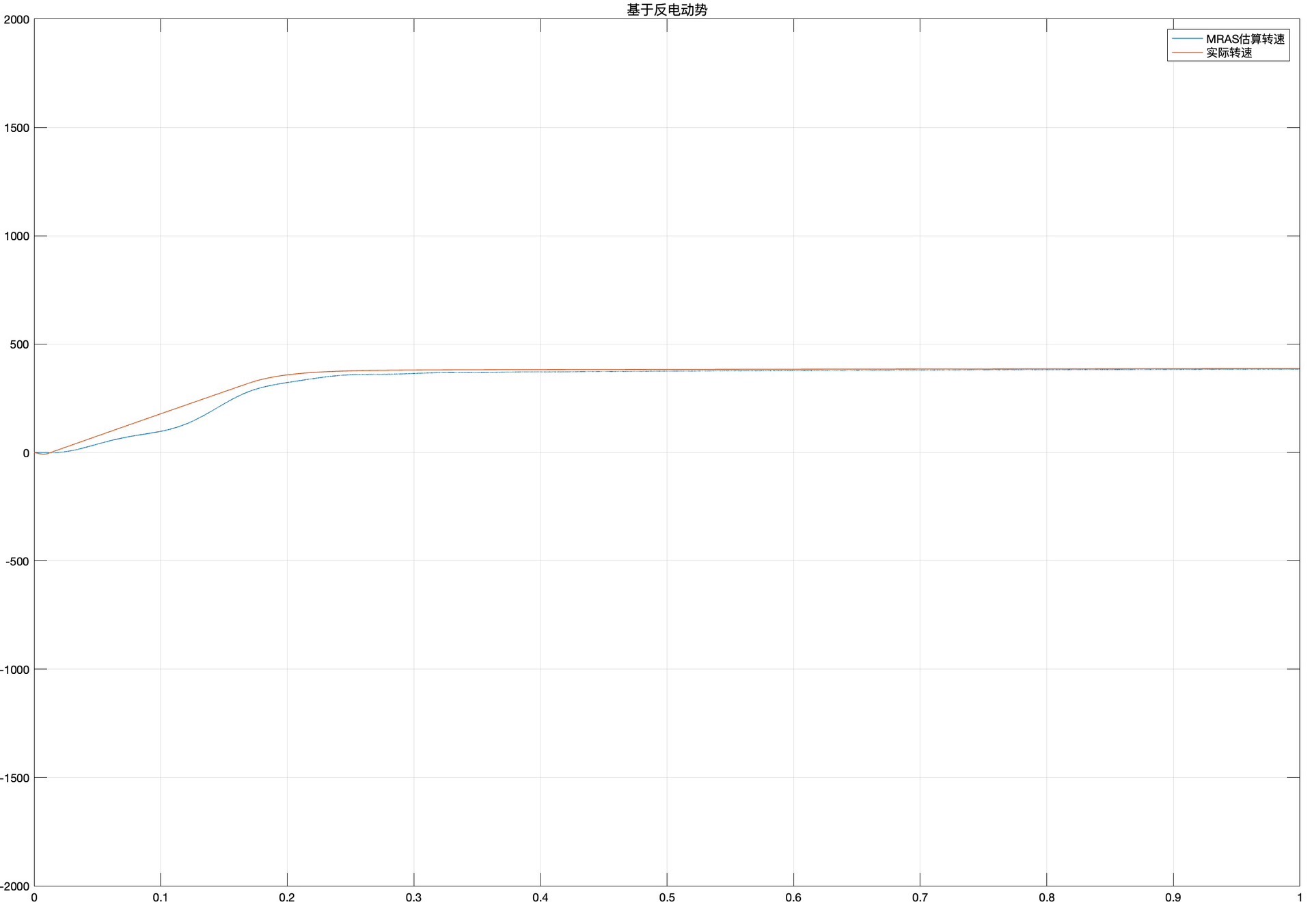
- 反电动势派:利用定子方程中的反电动势项玩"大家来找茬",实测值和估算值的偏差直接暴露转速信息。在Simulink中常用乘法器模块实现误差的交叉乘积,比写代码更直观。
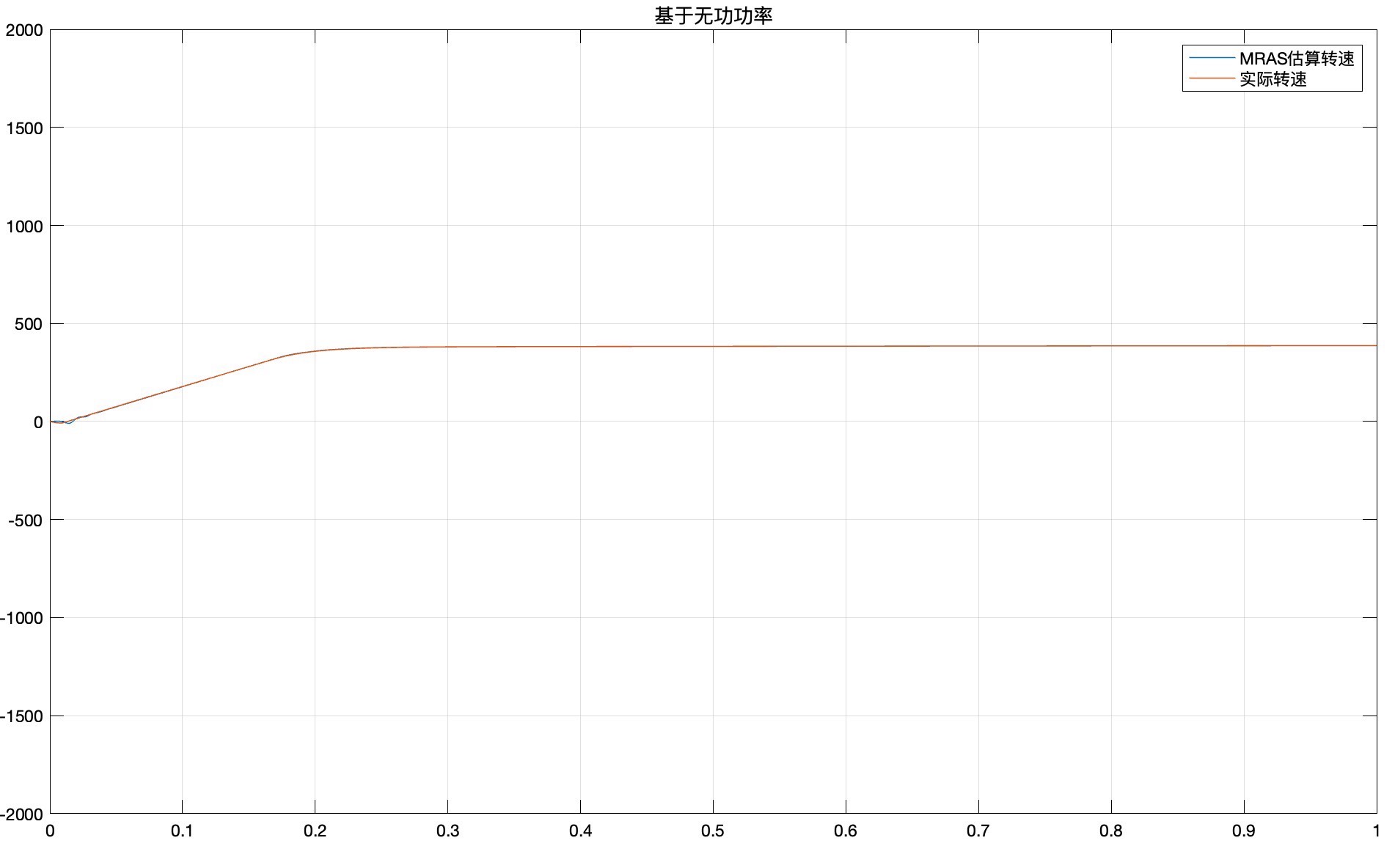
- 无功功率派:无功功率对转速变化不敏感的特性让它成为天然的参考基准。这个模型的参数敏感度最低,实测中发现当电机参数漂移20%时,转速估计误差还能控制在2%以内。
Simulink里的魔术手
基于MRAS的异步电机直接转矩控制/基于转子磁链模型的MRAS转速辨识/基于反电动势模型的MRAS转速辨识/基于无功功率模型的MRAS转速辨识 在simulink搭建的异步电机模型预测转矩控制模型之上进行改进,把转速环中实际转速从测量值更换为MARS观测器的转速估计值,模拟了现实中电机无速度传感器的情况。 此模型内包含了基于转子磁链模型的、基于反电动势模型的、基于无功功率模型的MRAS转速辨识 附带说明文档,模型可直接运行、可调节,默认发送2023b版本的simulink模型,需要其它版本的备注一下;
原模型的转速环改造就像给赛车换装自动驾驶仪:
- 干掉编码器模块(别手软)
- 把MRAS观测器输出接入转速环
- 增加抗饱和补偿(防止积分项发疯)
重点看看反电动势模型的实现:
电压模型
└─> 反电动势计算 → 可调模型
实际系统
└─> 反电动势实际值
自适应机构 ← 误差信号这里的低通滤波器设计是门学问,截止频率设高了噪声大,设低了响应慢。实测中0.5~1倍基波频率效果最佳。
调参翻车实录
第一次运行时转速估计像过山车,排查发现:
- 自适应增益太大导致震荡
- 磁链初值不对引发发散
- 采样时间与PWM频率不匹配
调整秘诀:
- 先用理论值×0.3作为初始增益
- 加入泄露项防止积分饱和
- 用Rate Transition模块解决多速率问题
三剑客比武台
空载突加转矩时:
- 转子磁链法响应最快(0.1s收敛)
- 无功功率法超调最小(<5%)
- 反电动势法抗负载扰动最强
实测数据对比:
| 方法 | 稳态误差 | 动态响应 | 参数敏感度 |
|---|---|---|---|
| 转子磁链 | 0.8% | 快 | 高 |
| 反电动势 | 1.2% | 中 | 中 |
| 无功功率 | 1.5% | 慢 | 低 |
模型包里包含三种方法的切换开关,把Constant模块的值设为1/2/3就能随时换侦探上场。建议运行时先打开Signal Logging功能,观测psi_error的变化趋势比看转速曲线更能发现问题。
写给动手派
- 遇到估计值震荡时,先检查电压测量模块的噪声处理
- 负载突变时适当调低自适应增益
- 磁链观测器需要1-2个周期的收敛时间
- 模型支持2019b及以上版本,低版本用户记得转换文件格式
这套方案已经在实验室的22kW异步电机上跑通,下次可以聊聊怎么移植到DSP实现——那又是另一段与寄存器搏斗的欢乐时光了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献179条内容
已为社区贡献179条内容

{kind=link}
所有评论(0)