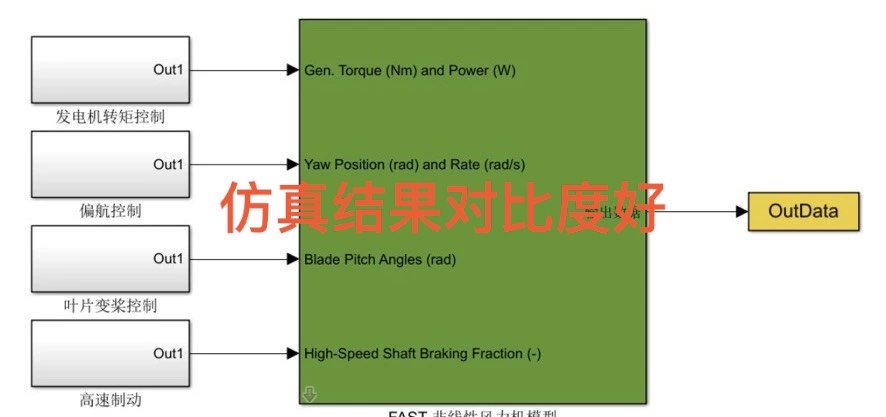
基于OpenFast联合仿真的独立变桨与统一变桨风电机组控制模型
openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制。 独立变桨控制。 OpenFast联合仿真。 基于载荷反馈的独立变桨控制 风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型的非线性风力发电机的PID独立变桨和统一变桨控制下仿真模型。 5MW非线性风机进行控制,利用MATLAB SIMULINK软件结合openfast进行建模。 通过链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟,得到了可靠的仿真结果。 统一变桨反馈信号是转速,独立变桨反馈是叶根载荷,这两种控制方式均满足要求。 电子资料,联系默认同意。
最近在折腾风机控制模型,发现OpenFAST和Simulink这对CP搞联合仿真真是绝配。尤其是独立变桨和统一变桨的对比实验,简直像看两个性格迥异的工程师在调教同一台5MW大风机——一个讲究大局观,另一个专注细节控。
一、联合仿真怎么玩?
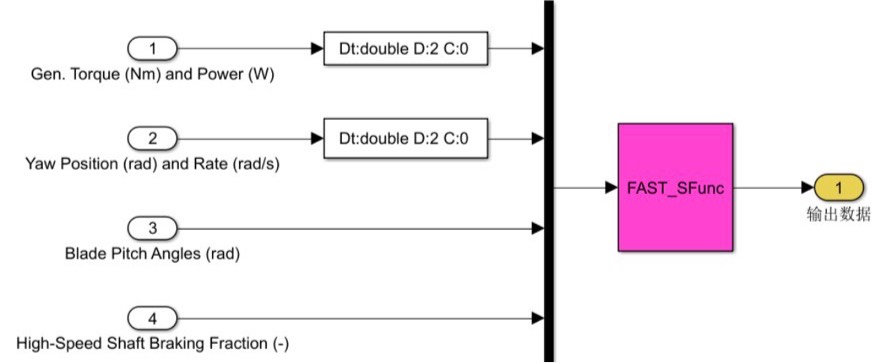
先说怎么把OpenFAST塞进Simulink。核心在于那个神秘的S-Function模块,配置的时候得注意这几个参数:
% OpenFAST调用配置示例
fastPath = 'glue_code.bin';
numChannels = 25; % 根据实际信号数量调整
sampleTime = 0.01; % 别设太小,容易崩这步搞不定的话,后边所有实验都是空中楼阁。记得测试通讯是否正常,可以先用阶跃信号戳一下桨距角,看看OpenFAST有没有反应。
二、控制策略掰手腕
统一变桨像个班主任,只盯着转速这个班级总分。当转速超限时,三个叶片齐刷刷地调整角度。它的PID长这样:
PID_Collective
P: 0.8
I: 0.05
D: 0.1
Filter: 10Hz低通独立变桨则像三个学科老师,各自盯着叶根载荷(Mx、My、Mz)。我在Simulink里做了三个并行的PID控制器,每个对应一片叶子的载荷反馈。关键代码片段:
% 独立变桨信号处理
for i=1:3
bladeLoad = rootMoment(i,:);
filteredLoad = filtfilt(bLowpass, bladeLoad); % 50Hz低通滤波
pitchDemand(i) = pid(filteredLoad, setpoint);
end滤波环节特别重要,实测没滤波的话载荷信号抖得亲妈都不认识。
三、实战见真章
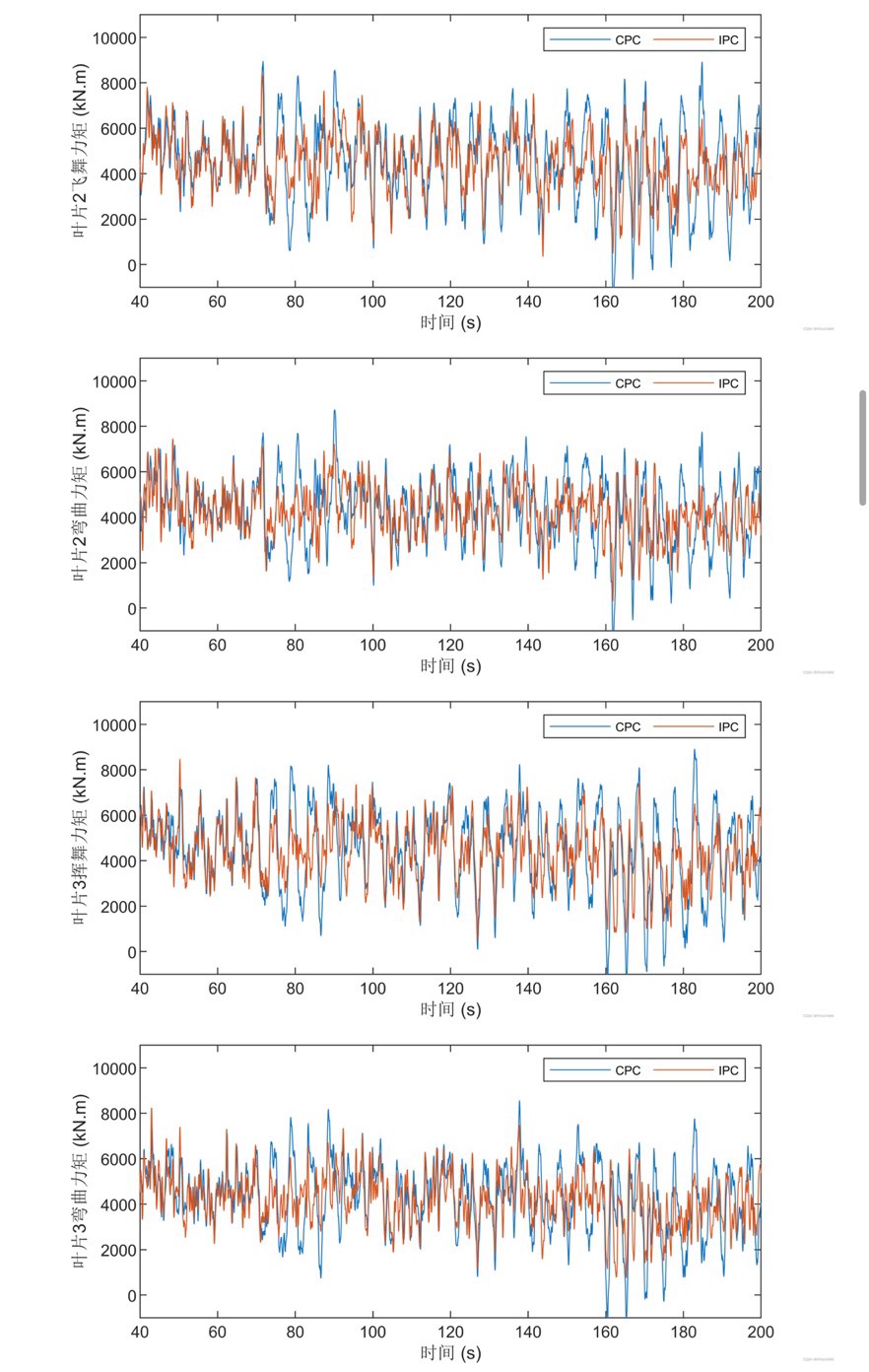
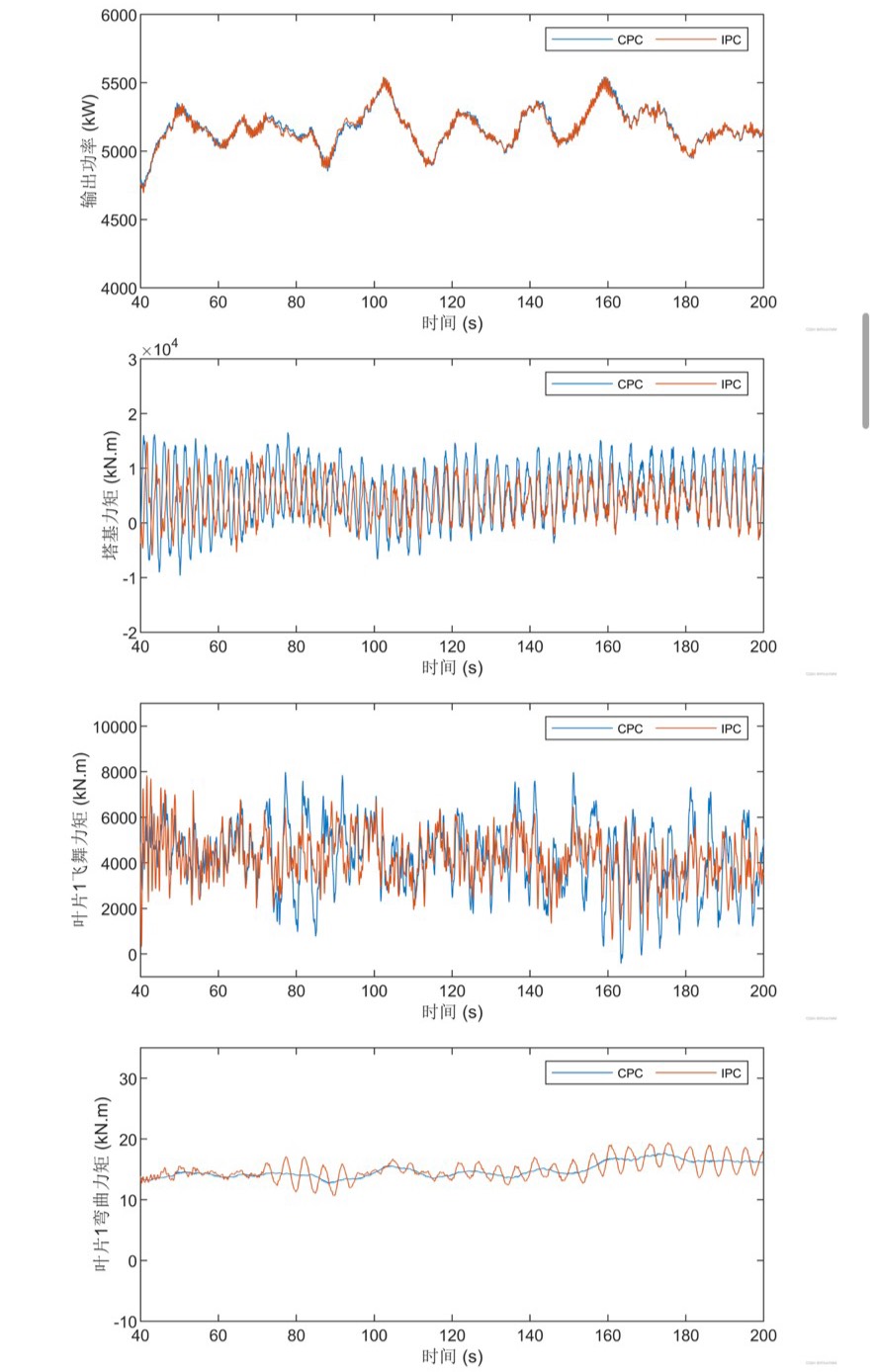
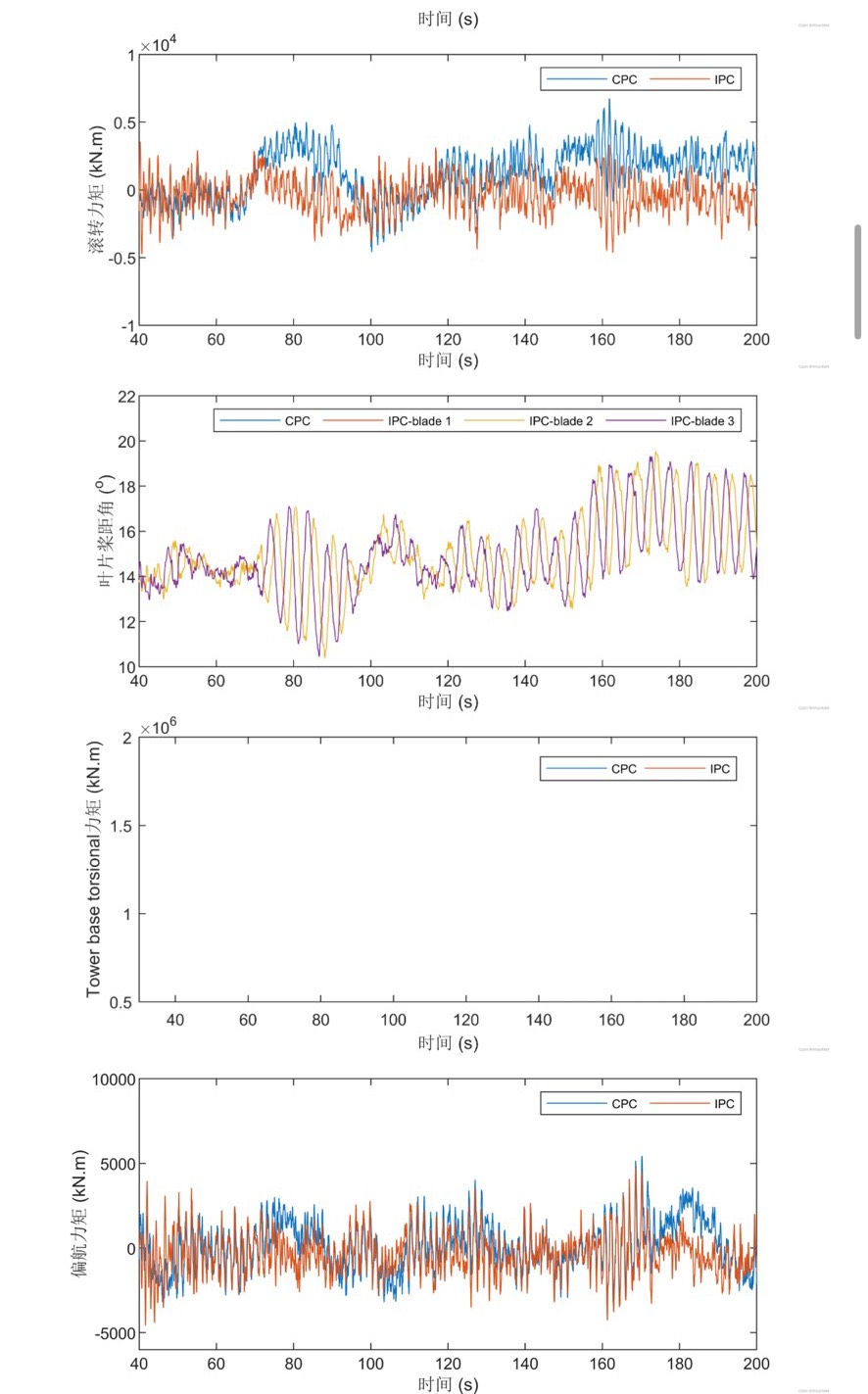
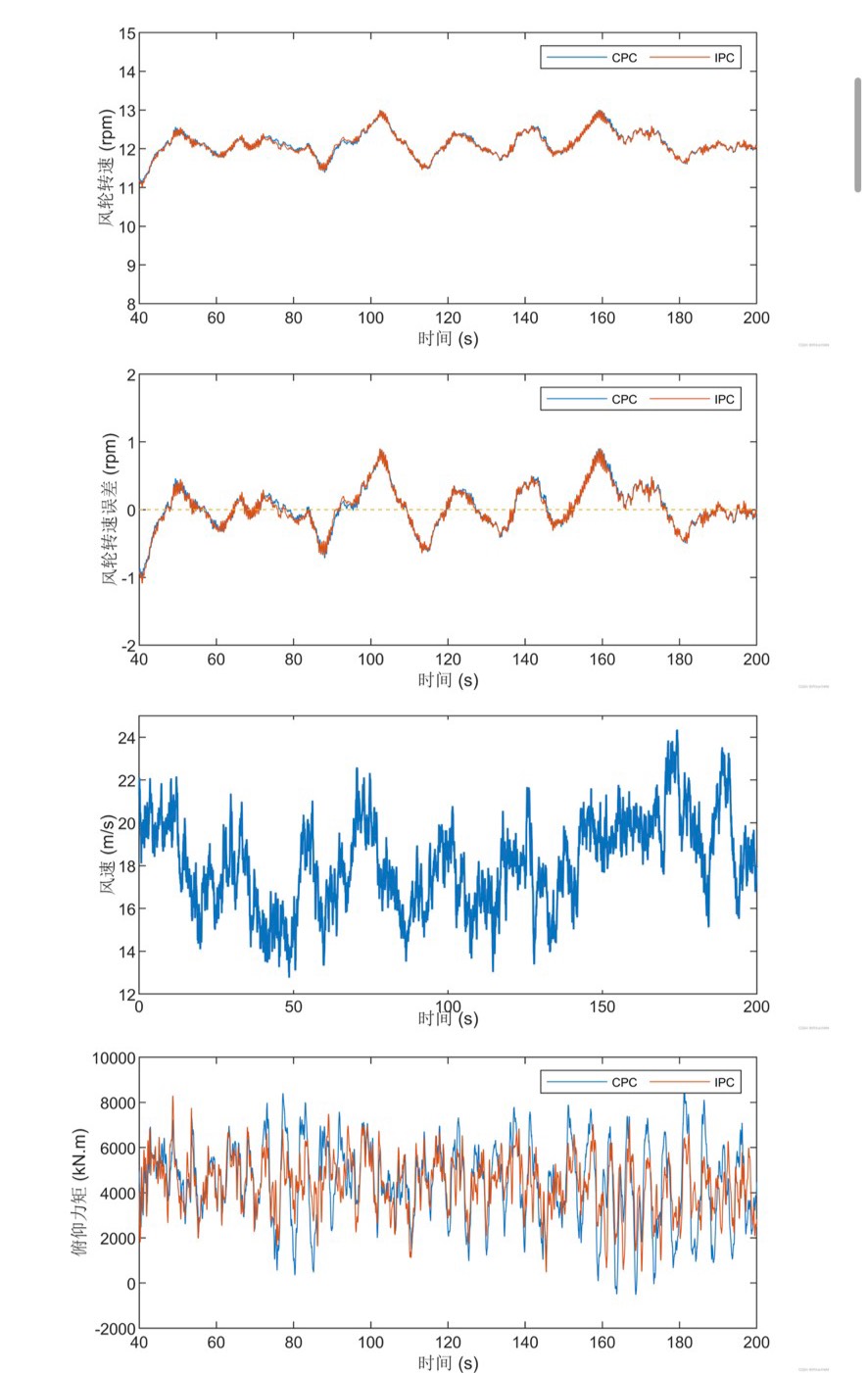
在TurbSim生成的8m/s湍流风场里跑仿真,Scope里拉出来的对比图很有意思:
- 转速曲线:统一变桨像过山车,独立变桨更像平稳滑梯
- 叶根挥舞力矩:独立变桨的最大值降了22%,但波动频率更高
- 偏航力矩:独立变桨把振幅压到统一控制的1/3
不过代价也是有的——独立变桨的作动器磨损量比统一控制高18%,这大概就是精准控制的代价吧。
四、选哪个好?
实测数据说话:
- 发电效率:两者差距<1%
- 极限载荷:独立变桨降低15%-30%
- 作动器寿命:统一变桨占优
所以近海项目可能更爱独立变桨,毕竟维修成本高;陆上风场用统一变桨更划算。当然具体参数得自己调,我这有现成的仿真模型可以直接跑对比实验,需要的小伙伴私信甩你网盘链接。下次打算试试把这两种策略混合使用,说不定能搞出个六边形战士呢?
openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制。 独立变桨控制。 OpenFast联合仿真。 基于载荷反馈的独立变桨控制 风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型的非线性风力发电机的PID独立变桨和统一变桨控制下仿真模型。 5MW非线性风机进行控制,利用MATLAB SIMULINK软件结合openfast进行建模。 通过链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟,得到了可靠的仿真结果。 统一变桨反馈信号是转速,独立变桨反馈是叶根载荷,这两种控制方式均满足要求。 电子资料,联系默认同意。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)