基于单矢量控制的永磁同步电机模型预测电流控制Simulink仿真模型探索
基于单矢量控制的永磁同步电机模型预测电流控制Simulink仿真模型 对应学习资料: 1.带一份与仿真对应的Word详细说明报告。 2.一份与仿真对应的详细讲解PPT 针对具体被控对象(PMSM),建立定子电流预测模型,然后通过采集当前时刻的定子电流值来计算得出对应的电流环输出,以预测模型替换了PI控制器后,省去设计控制器时困难的参数选取,避免了PI控制器惯有的超调等问题,并且预测控制比传统PI控制的动态响应更快,鲁棒性更强。 预测计算得到下一时刻的定子电流值于在线寻优过程中能够依据控制目标的要求进行优化,代价函数的构造可根据不同要求设计成不同形式,除了能够完成基本电流控制之外还具备实现多目标综合优化的能力,
最近在研究永磁同步电机(PMSM)的控制策略,发现基于单矢量控制的模型预测电流控制(MPCC)挺有意思,和大家分享下。
背景与原理
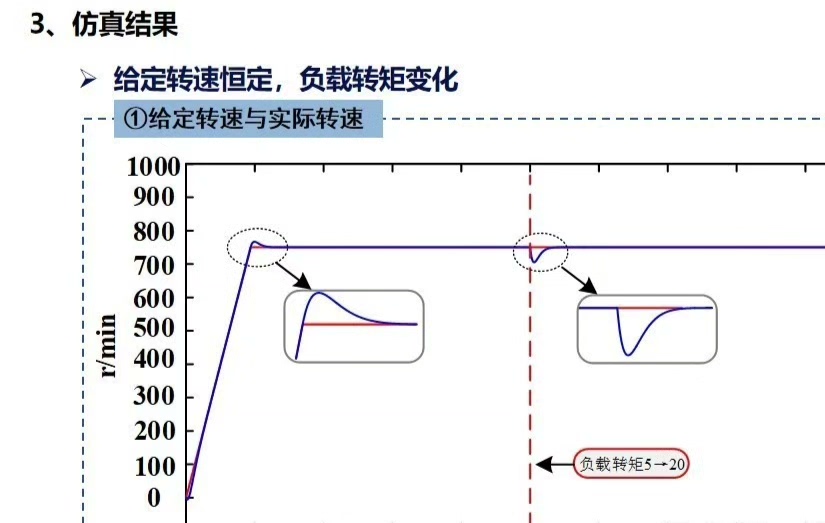
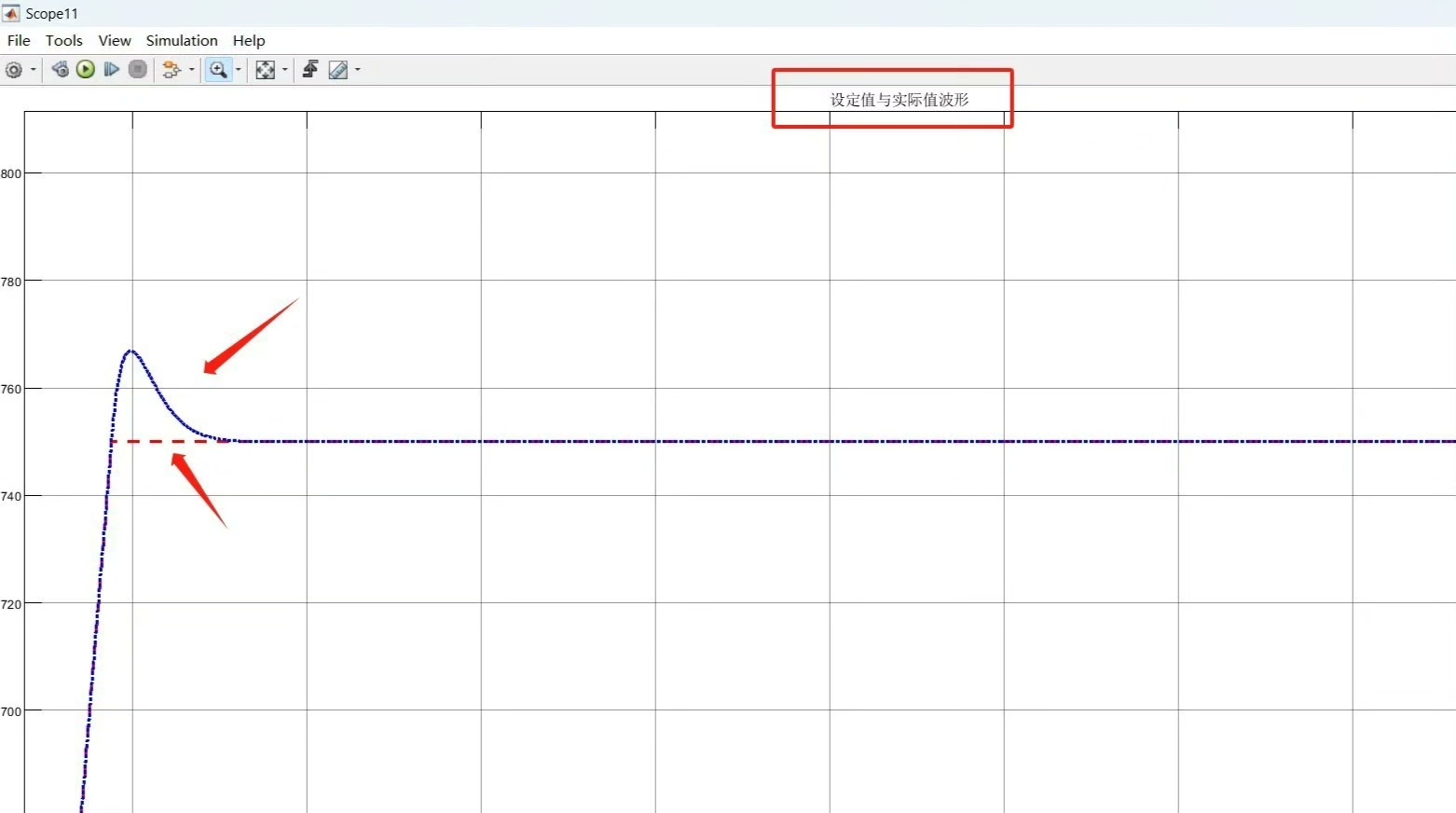
传统的PMSM控制中,PI控制器是常用的电流控制手段。但设计PI控制器时,参数选取往往让人头疼,而且超调问题也难以避免。而基于单矢量控制的MPCC就不一样啦,它通过建立定子电流预测模型,采集当前时刻的定子电流值来计算电流环输出,成功避开了PI控制器这些麻烦。
想象一下,传统PI像个按部就班的工匠,参数固定后就按既定套路工作。而MPCC则像是个聪明的探索者,根据实时情况调整策略。它的动态响应比PI更快,鲁棒性也更强,就像是一个反应敏捷且坚韧的运动员。
定子电流预测模型构建
我们来看看这个关键的定子电流预测模型怎么回事。假设定子电压方程为:
\[ u{s\alpha}=R{s}i{s\alpha}+\frac{d\psi{s\alpha}}{dt} \]
\[ u{s\beta}=R{s}i{s\beta}+\frac{d\psi{s\beta}}{dt} \]
这里 \( u{s\alpha} \) 和 \( u{s\beta} \) 是定子在 \( \alpha - \beta \) 坐标系下的电压分量, \( i{s\alpha} \) 和 \( i{s\beta} \) 是对应的电流分量, \( R{s} \) 是定子电阻, \( \psi{s\alpha} \) 和 \( \psi_{s\beta} \) 是磁链分量。
离散化后,可以得到电流预测模型(这里简单示意一下离散化过程):
\[ i{s\alpha}(k + 1)=i{s\alpha}(k)+\frac{T{s}}{L{s}}(u{s\alpha}(k)-R{s}i{s\alpha}(k)+\omega{e}L{s}i{s\beta}(k)) \]
\[ i{s\beta}(k + 1)=i{s\beta}(k)+\frac{T{s}}{L{s}}(u{s\beta}(k)-R{s}i{s\beta}(k)-\omega{e}L{s}i{s\alpha}(k)) \]
基于单矢量控制的永磁同步电机模型预测电流控制Simulink仿真模型 对应学习资料: 1.带一份与仿真对应的Word详细说明报告。 2.一份与仿真对应的详细讲解PPT 针对具体被控对象(PMSM),建立定子电流预测模型,然后通过采集当前时刻的定子电流值来计算得出对应的电流环输出,以预测模型替换了PI控制器后,省去设计控制器时困难的参数选取,避免了PI控制器惯有的超调等问题,并且预测控制比传统PI控制的动态响应更快,鲁棒性更强。 预测计算得到下一时刻的定子电流值于在线寻优过程中能够依据控制目标的要求进行优化,代价函数的构造可根据不同要求设计成不同形式,除了能够完成基本电流控制之外还具备实现多目标综合优化的能力,
其中 \( T{s} \) 是采样周期, \( L{s} \) 是定子电感, \( \omega_{e} \) 是电角速度。
这个模型就是MPCC的核心武器之一,它根据当前时刻的信息预测下一时刻的电流,就像给电机安上了一个“未来眼”。
Simulink仿真模型搭建
在Simulink里搭建这个模型其实也不难。先建立PMSM的基本模块,设置好电机的参数,比如定子电阻、电感、永磁体磁链这些。
然后构建电流预测模块,把刚才的电流预测公式用Simulink的模块实现。这里可能会用到一些数学运算模块,像加法器、乘法器这些,把公式里的各项运算对应起来。
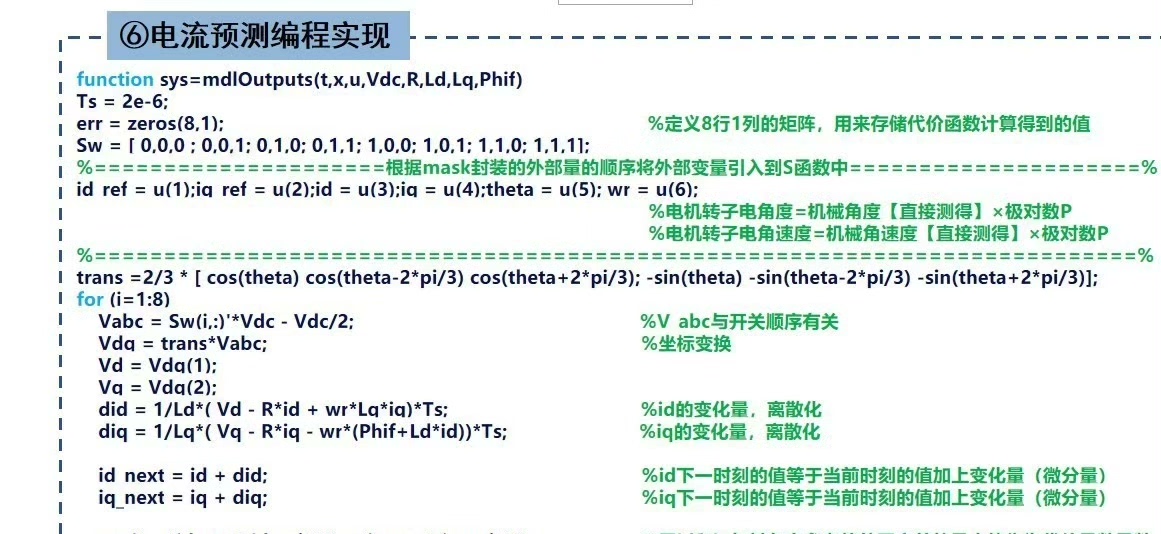
% 假设这里有个简单的电流预测函数
function [i_alpha_next, i_beta_next] = predict_current(i_alpha, i_beta, u_alpha, u_beta, Rs, Ls, omega_e, Ts)
i_alpha_next = i_alpha + (Ts / Ls) * (u_alpha - Rs * i_alpha + omega_e * Ls * i_beta);
i_beta_next = i_beta + (Ts / Ls) * (u_beta - Rs * i_beta - omega_e * Ls * i_alpha);
end上面这段Matlab代码简单实现了电流预测的功能,在Simulink里可以用S函数或者Matlab Function模块来调用类似的功能。
代价函数这块也很关键,它决定了控制的优化方向。比如我们想要同时控制电流的幅值和相位,可以设计这样一个代价函数:
\[ g = (i{s\alpha}^{}-i{s\alpha}(k + 1))^{2}+(i{s\beta}^{}-i{s\beta}(k + 1))^{2} \]
这里 \( i{s\alpha}^{} \) 和 \( i{s\beta}^{} \) 是电流的参考值。通过调整代价函数的形式,我们可以实现多目标综合优化,这也是MPCC的一个强大之处。
学习资料助力理解
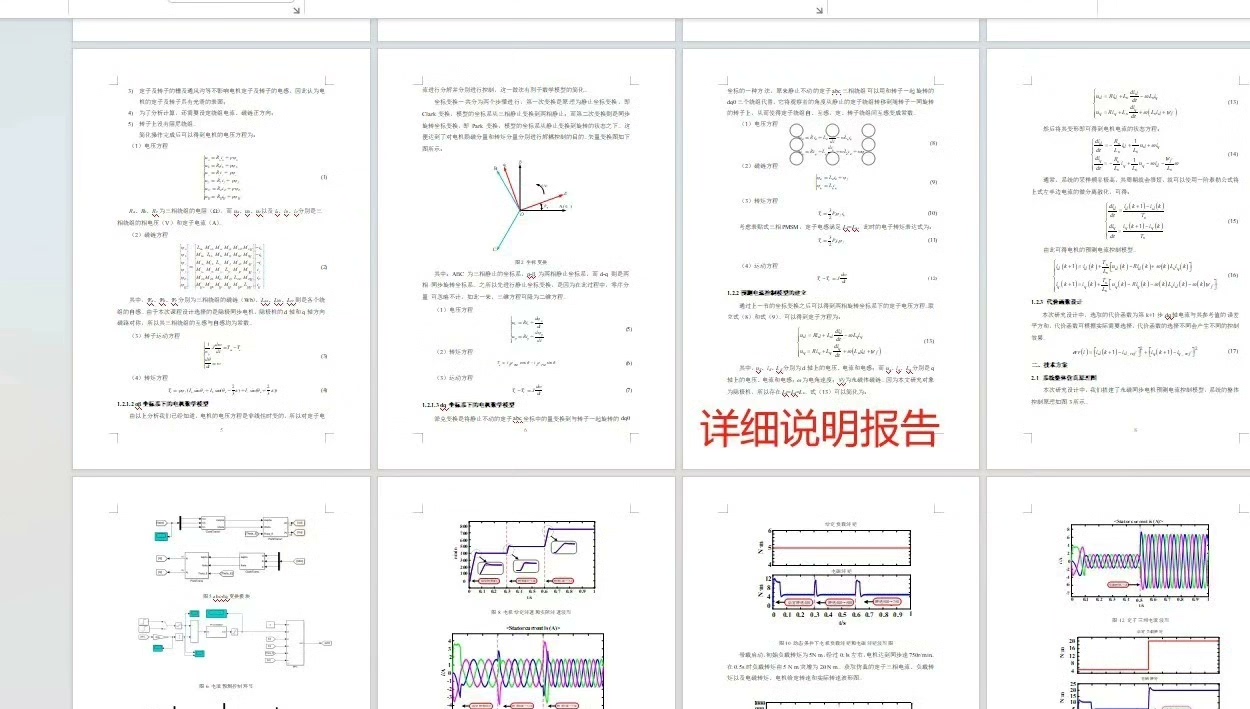
很幸运,这次的学习资料很丰富。有一份Word详细说明报告,它就像一本贴心的指南,从模型的理论基础到Simulink里每个模块的设置,都解释得清清楚楚。还有一份详细讲解PPT,通过图表和文字结合的方式,把复杂的原理简单化,一步步引导你理解。
有了这些资料,再加上自己动手搭建模型、调试参数,相信对基于单矢量控制的永磁同步电机模型预测电流控制会有更深入的认识。
希望这篇博文能给同样在研究这块内容的小伙伴一些启发,一起在电机控制的奇妙世界里探索吧!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)