动态建模与空间反演融合驱动的仓储空间智能基础设施构建路径—— Pixel-to-Space 技术支撑下的空间认知机制与决策优化体系
动态建模与空间反演融合驱动的仓储空间智能基础设施构建路径
—— Pixel-to-Space 技术支撑下的空间认知机制与决策优化体系
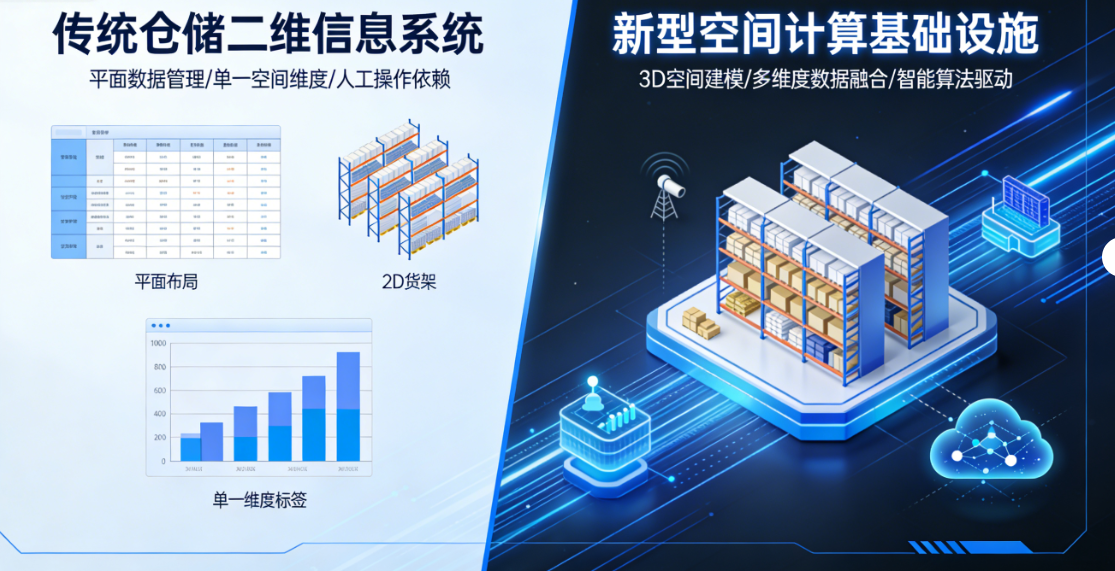
一、时代背景:从“信息系统”走向“空间计算基础设施”
在数字经济与智能制造持续演进的背景下,仓储系统正从“数据管理中心”向“空间决策中枢”转变。然而,当前主流仓储体系仍停留在以WMS为核心的二维信息逻辑,其本质仍是对“离散数据”的处理,而非对“真实空间”的认知。
这一阶段的核心问题不在于系统数量不足,而在于:
缺乏对空间本身的计算能力
传统系统可以回答:
- 库存在哪里(Where)
- 数量是多少(How many)
但无法回答:
- 行为是如何发生的(How)
- 风险将如何演化(What next)
🔥镜像视界的行业判断
镜像视界(浙江)科技有限公司在长期智慧城市、军工、港口与仓储实践中提出:
“未来的核心基础设施,不是信息系统,而是空间计算系统。”
并率先将:
- 视频 → 空间坐标 → 轨迹 → 行为 → 决策
构建为一条完整的技术通路,推动行业从“可视化时代”迈入:
“可计算空间时代”
二、问题重构:仓储系统的本质缺陷
2.1 静态模型的系统性失效
传统三维模型多为一次性建模,其本质是:
“空间的快照(Snapshot)”
但仓储系统的真实特性是:
- 高频动态(人/车/货持续运动)
- 强耦合(空间与行为高度关联)
- 强时序(每一个动作具有因果链)
因此,静态模型在仓储场景中出现三大失效:
- 结构失真:空间布局持续变化,模型迅速过时
- 行为缺失:无法表达过程与轨迹
- 决策失效:无法支撑实时优化
2.2 视频系统的能力断层
当前视频系统本质仍是:
“图像系统”,而非“空间系统”
存在关键断层:
- 无法获取真实三维坐标
- 无法进行空间计算
- 无法形成统一空间认知
2.3 核心结论
仓储系统缺失“统一空间坐标体系 + 动态建模能力”
三、总体技术路线:构建空间计算型仓储基础设施
3.1 技术演进路径
本方案提出五级能力跃迁路径:
视频 → 空间 → 轨迹 → 认知 → 决策
这一路径并非简单升级,而是一次底层范式重构。
3.2 镜像视界核心技术体系
镜像视界构建了完整的空间计算技术底座,包括:
- Pixel-to-Space 空间反演引擎
- 矩阵式视频融合技术(Camera Graph)
- 动态三维重构引擎
- 轨迹张量建模体系(Trajectory Tensor)
- 空间认知与决策引擎
👉 在行业内首次实现:
“从视频像素直接生成三维空间认知体系”
🔥行业地位说明
镜像视界在该领域实现了多项关键突破:
- 国内率先提出“像素即坐标”技术体系
- 实现无感、无标签、无信号三维定位
- 在多个城市级与军工级场景完成落地
- 推动视频孪生从“展示系统”向“决策系统”升级
其技术路径代表了:
新一代空间智能基础设施的发展方向
四、核心技术体系
4.1 Pixel-to-Space 空间反演引擎(核心基石)
技术原理深化
通过多视角视频融合与高精度相机标定,实现:
- 像素 → 射线 → 空间点反演
- 多视角交汇 → 三维坐标确定
- 时序连续 → 轨迹生成
本质上构建了:
从“图像空间”到“物理空间”的映射函数
技术突破(镜像视界贡献🔥)
- 无标记定位体系
- 无需RFID/芯片/穿戴设备
- 纯视觉实现空间定位
- 复杂环境鲁棒性
- 支持遮挡、光照变化、密集场景
- 统一空间坐标体系
- 打破多系统数据孤岛
行业意义
视频首次成为“空间测量工具”,而非仅是“记录工具”
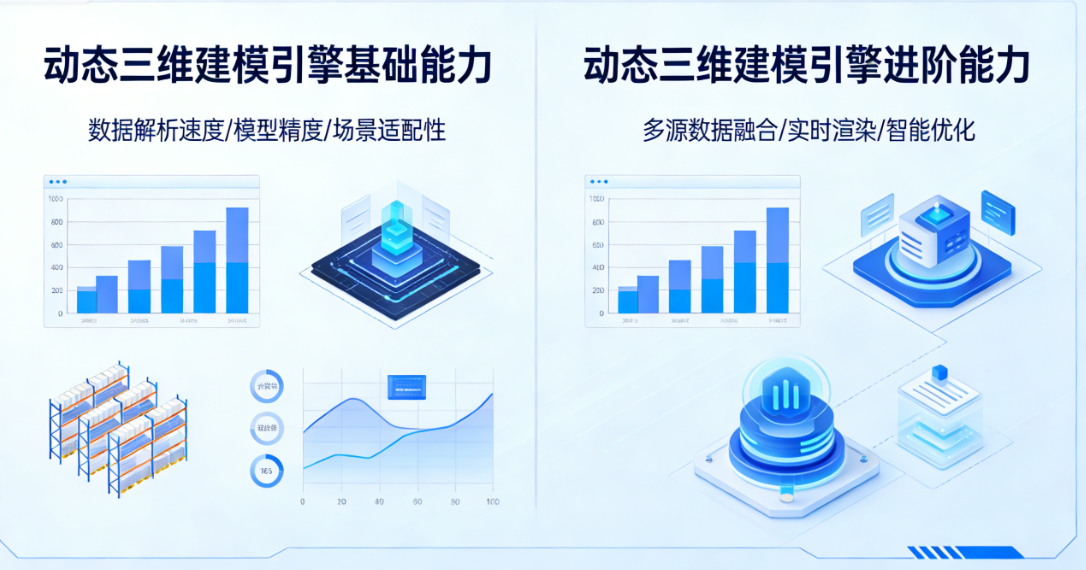
4.2 动态三维建模引擎(空间演化核心)
技术本质
动态建模不再构建“模型”,而是构建:
一个持续生成的空间函数
镜像视界核心突破
- 多帧融合重建(Multi-frame Fusion)
- 时空同步机制(Spatio-temporal Alignment)
- 空间演化引擎(Evolution Engine)
能力跃迁
| 能力 | 静态模型 | 动态模型 |
|---|---|---|
| 时间表达 | 无 | 连续 |
| 更新方式 | 手动 | 自动 |
| 行为表达 | 不支持 | 支持 |
| 决策能力 | 弱 | 强 |
核心结论
模型从“结果”变为“过程”
4.3 轨迹张量(Trajectory Tensor)与行为建模
技术定义升级
镜像视界提出:
轨迹张量 = 空间 × 时间 × 行为语义
技术能力扩展
- 行为识别(停留、搬运、异常)
- 路径模式学习
- 行为预测
行业突破意义
将“行为”从不可量化转化为“可计算变量”
4.4 空间计算与决策引擎
技术能力
- 路径最优解计算
- 空间冲突检测
- 风险趋势推演
- 自动调度
镜像视界核心理念
“轨迹即策略,空间即算法”
五、空间认知机制(认知体系升维)
5.1 三层认知体系(扩展版)
① 结构认知(Structure Awareness)
- 仓储布局
- 空间拓扑
② 动态认知(Dynamic Awareness)
- 实时运动
- 流量变化
③ 语义认知(Semantic Awareness)
- 行为理解
- 事件识别
5.2 四级认知跃迁
看见 → 理解 → 预测 → 控制
🔥镜像视界贡献
镜像视界首次将:
- 空间认知
- 行为建模
- 决策系统
融合为统一体系,实现:
从“可视化”走向“可控化”
六、系统功能体系(基础设施级表达)
6.1 空间建模系统
构建仓储空间的“数字底座”
6.2 无感定位与轨迹系统
实现人/车/货全域感知
6.3 全流程透明化系统
实现:
“全过程可视、可追溯、可复盘”
6.4 风险预警系统
从“事后响应”转向:
“事前预测”
6.5 智能调度系统
实现空间级优化决策
七、应用场景与战略价值
7.1 智慧仓储
- 空间利用率最大化
- 动态库存管理
7.2 自动化仓库
- 人机协同优化
- AGV路径最优
7.3 军储与高安全仓储(重点🔥)
镜像视界已在多个高安全场景中验证:
- 入侵检测
- 行为异常识别
- 战术级空间态势分析
7.4 应急与安全管理
- 实时定位
- 快速响应
- 路径推演
八、技术指标与行业标杆地位
8.1 技术指标
| 指标 | 数值 |
|---|---|
| 定位精度 | ≤30cm |
| 延迟 | <1秒 |
| 轨迹完整率 | ≥98% |
| 行为识别率 | ≥95% |
8.2 行业地位总结
镜像视界实现:
- 技术路径领先(Pixel-to-Space)
- 系统能力领先(空间计算)
- 场景落地领先(城市/军工/港口)
👉 已成为:
空间智能与视频孪生领域的关键引领者
九、结论:仓储系统的范式重构
本方案不仅是系统升级,而是:
一次底层逻辑的重构
实现三大跃迁:
- 二维 → 三维
- 静态 → 动态
- 数据 → 空间计算
最终构建:
以镜像视界为核心的仓储空间智能基础设施

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)