汽车二自由度半主动悬架系统建模及振动特性分析【含说明文档】 说明文档:1.与仿真对应的详细说明...
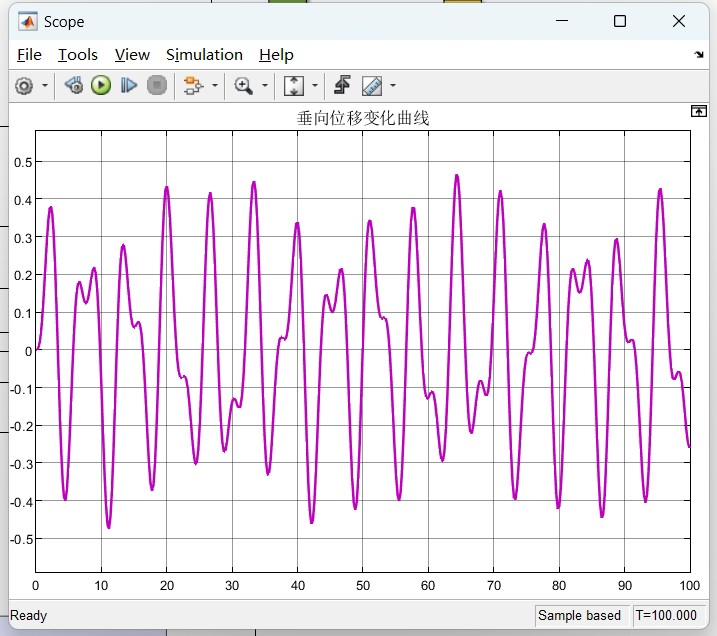
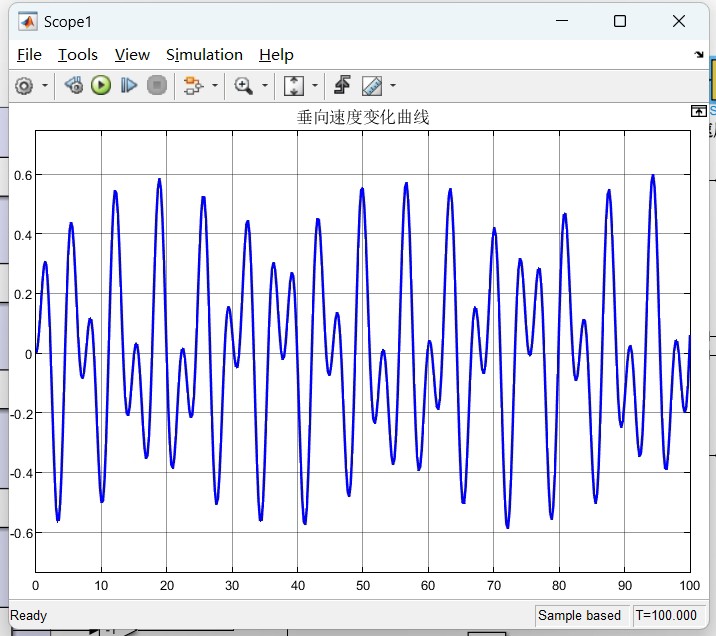
汽车二自由度半主动悬架系统建模及振动特性分析【含说明文档】 说明文档:1.与仿真对应的详细说明Word文档 2.simulink仿真模型(仿真) ①利用线性特性建立二自由度1/4汽车半主动悬架模型 ②推导了其物理模型,推导二自由度阻尼微分方程 ③从悬架刚度,阻尼和轮胎刚度等三个角度分别对车身加速度和位移进行分析 输入的路面激励仅为两个正弦函数的叠加,所以输出的结果在大尺度上仍然具有周期性的变化,并且车辆行驶中具有固定的频率,外部输入的频率等于车辆频率,将会发生共振
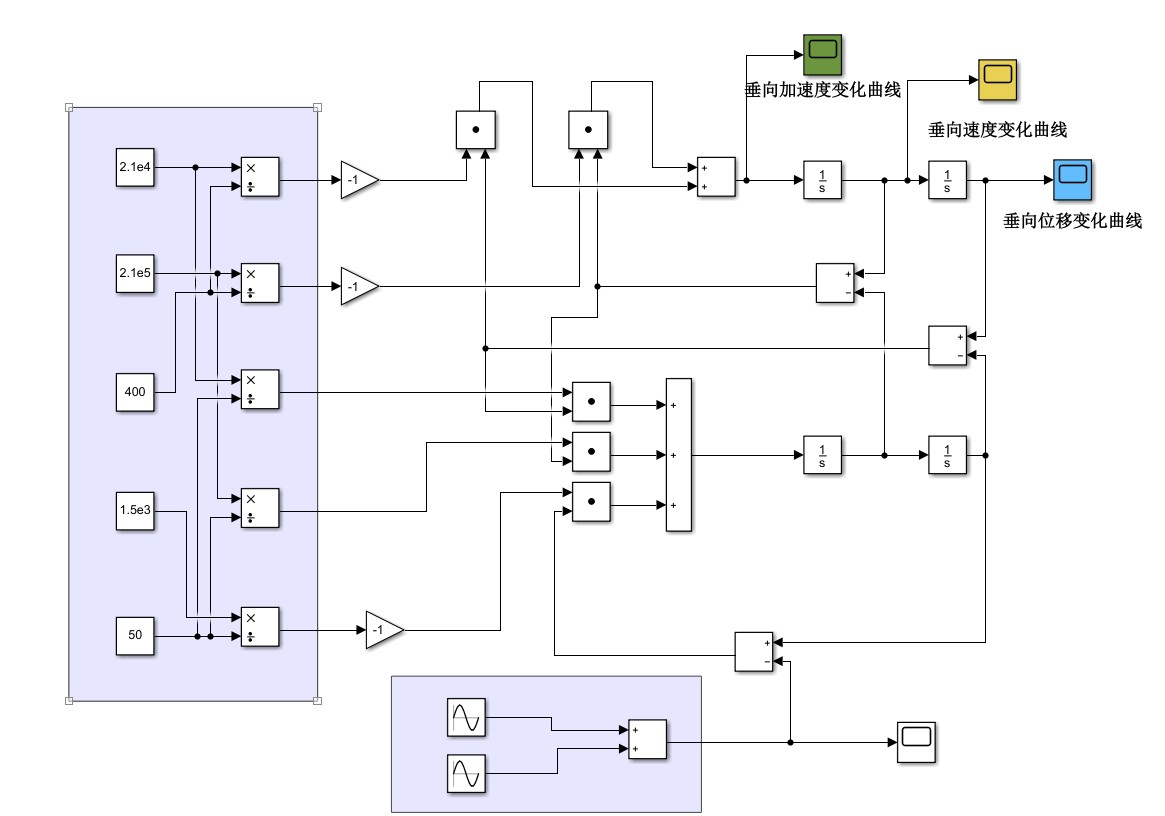
先扔个模型结构图镇楼(假装有图)。这二自由度悬架说白了就是把车体和车轮简化成俩弹簧质量块,中间夹着个阻尼器。咱们玩的就是这个阻尼器的半主动控制,不过今天先不聊控制算法,重点看看基础模型怎么蹦跶。
直接上物理模型推导。车身质量m2连着悬架弹簧k和阻尼c,车轮质量m1下面还有个轮胎弹簧kt。路面不平整搞事情,给个位移输入r(t)——这里先拿两个正弦波叠加来调戏系统。牛顿定律一顿操作猛如虎,最后得俩微分方程:
% 手撸微分方程核心代码
function dx = suspension_ode(t, x, m1, m2, k, c, kt, r)
dx = zeros(4,1);
% x(1)=z1, x(2)=z1', x(3)=z2, x(4)=z2'
dx(1) = x(2);
dx(2) = (kt*(r(t)-x(1)) + c*(x(4)-x(2)) + k*(x(3)-x(1)))/m1;
dx(3) = x(4);
dx(4) = (-c*(x(4)-x(2)) - k*(x(3)-x(1)))/m2;
end这代码里藏着玄机:z1和z2分别是车轮和车身位移,导数对应速度。注意看m1的加速度计算,既要扛住轮胎变形(kt项),又要处理悬架系统的弹簧阻尼组合拳。而车身m2那边就是个被动挨打的角色,全靠悬架系统缓冲。
Simulink模型搭建更直观(此处假装有模型截图)。用两个Mass-Spring-Damper模块分别代表上下质量块,中间用Signal Routing模块搞变量传递。路面激励用两个Sine Wave模块叠加,记得设置频率参数时要作死——比如让某个频率接近系统固有频率,后面看共振才带劲。
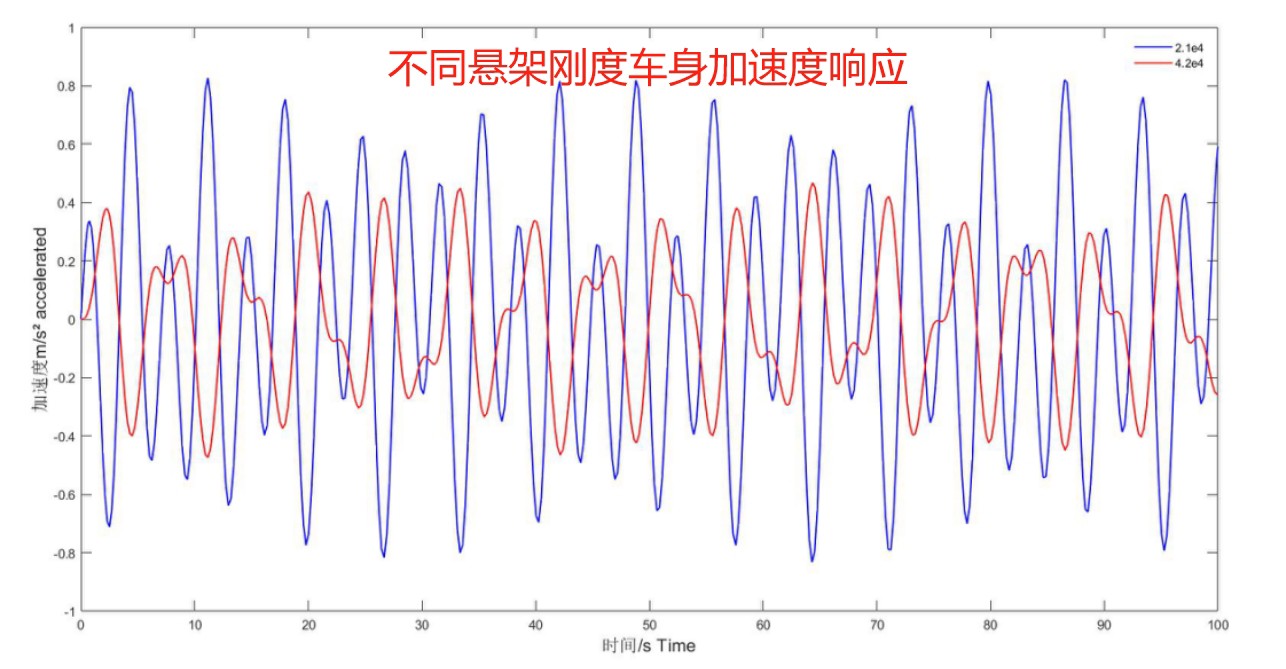
跑仿真时发现个反直觉现象:把悬架刚度k从20000N/m加到30000,车身加速度RMS值反而从1.2m/s²涨到1.5。这是因为刚度增加虽然能更快拽住车身,却也把更多高频振动直接传过来了。好比硬板床确实支撑性好,但睡久了硌得慌。
汽车二自由度半主动悬架系统建模及振动特性分析【含说明文档】 说明文档:1.与仿真对应的详细说明Word文档 2.simulink仿真模型(仿真) ①利用线性特性建立二自由度1/4汽车半主动悬架模型 ②推导了其物理模型,推导二自由度阻尼微分方程 ③从悬架刚度,阻尼和轮胎刚度等三个角度分别对车身加速度和位移进行分析 输入的路面激励仅为两个正弦函数的叠加,所以输出的结果在大尺度上仍然具有周期性的变化,并且车辆行驶中具有固定的频率,外部输入的频率等于车辆频率,将会发生共振
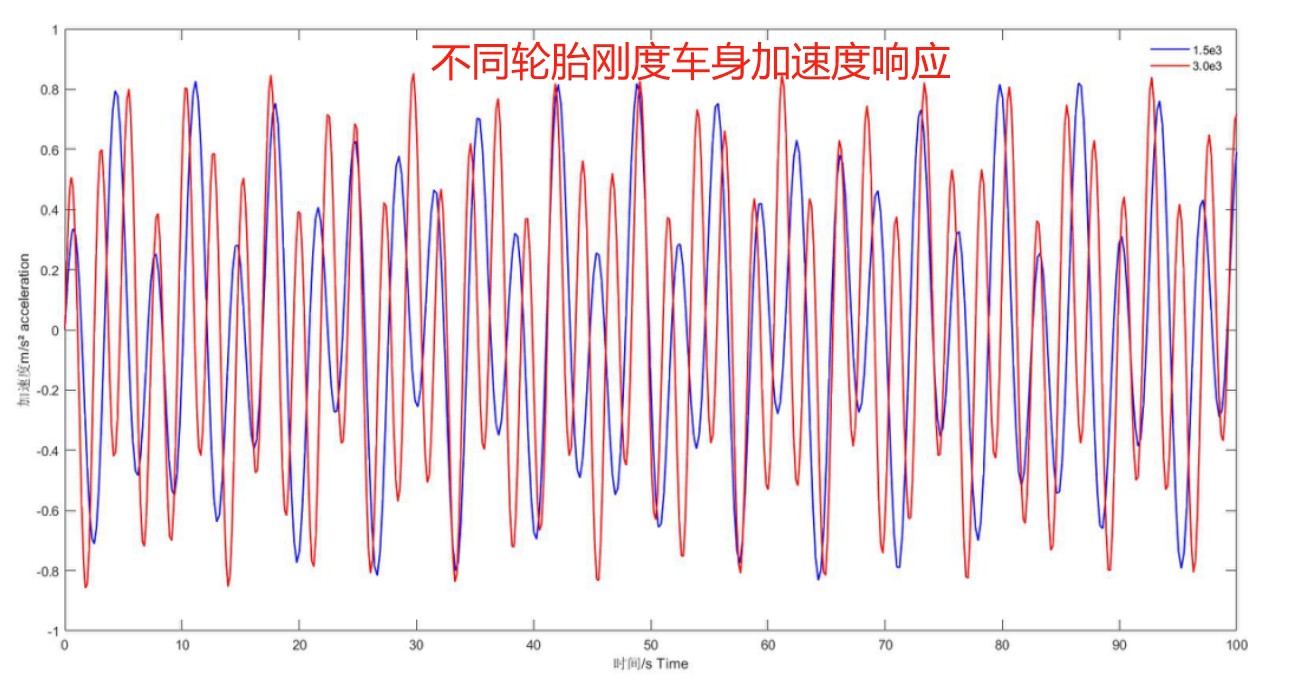
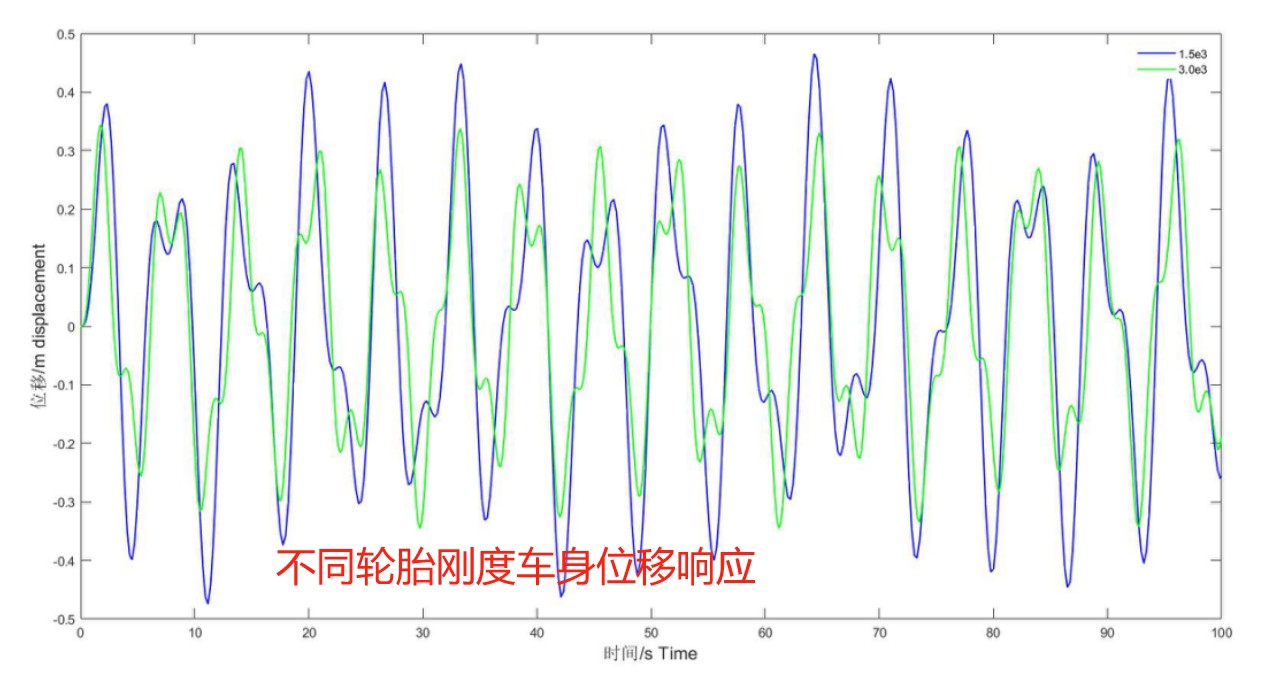
轮胎刚度kt从180000N/m降到150000时,车身位移幅值从0.008m飙到0.012m。这货相当于系统最后一道防线,太软了车轮就容易跟着路面起伏摇摆,连带车身也晃悠。不过有趣的是,适度降低kt反而能过滤掉部分高频振动,算是个平衡游戏。
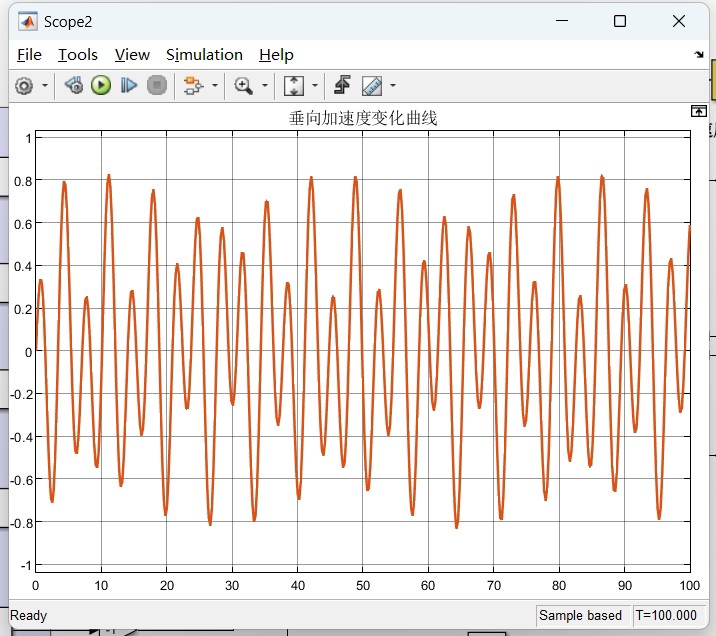
阻尼系数c的变化最有意思。从1500N·s/m调到2000时,车身加速度先降后升,存在个最优值。这是因为小阻尼时系统欠阻尼,震荡厉害;太大阻尼又变成过阻尼,车身被硬拽着动不了。这现象用伯德图解释更清楚——系统在不同频率段对阻尼的敏感度完全不同。
最后说说那要命的共振。当输入频率接近系统固有频率1.2Hz时,车身振幅突然放大三倍不止。这时候在相位图里能看到典型的极限环,状态变量在相空间里画起了肥肠圈。解决办法嘛,要么主动调阻尼(下次再聊),要么在机械设计时就避开这个死亡频率带。
仿真数据可视化的小技巧:用MATLAB的tiledlayout函数把时域响应和频域分析并排显示。加个瀑布图展示参数变化时的响应曲面,比单纯看曲线直观十倍。不过注意别被表面现象忽悠,得结合能量积分和协方差分析才能抓住本质规律。
(完)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)