探索FOC矢量控制永磁同步电机全速域无位置传感器控制
FOC矢量控制永磁同步电机全速域无位置传感器控制。 转子磁场定向控制 全速域无位置传感器控制 永磁同步电机PMSM 低速采用高频脉振方波注入法。 中高速采用改进的SMO滑膜观测器 。 转速切换区域采用的是加权切换法。 带有参考资料和说明文档,仿真模型。
在电机控制领域,永磁同步电机(PMSM)凭借其高效、高功率密度等优势,被广泛应用。而FOC矢量控制结合全速域无位置传感器控制技术,更是为PMSM的精准控制开辟了新的天地。
转子磁场定向控制(FOC)
FOC的核心思想是将定子电流解耦成励磁电流分量和转矩电流分量,实现对电机磁通和转矩的独立控制,就如同给电机的控制安上了两个精准的“舵”。
以三相PMSM为例,在三相静止坐标系(abc坐标系)下,电机的电压方程较为复杂:
\[
\begin{cases}
u{a} = R{s}i{a} + p\psi{a} \\
u{b} = R{s}i{b} + p\psi{b} \\
u{c} = R{s}i{c} + p\psi{c}
\end{cases}
\]
这里\(u{a,b,c}\)是三相定子电压,\(i{a,b,c}\)是三相定子电流,\(R{s}\)是定子电阻,\(p\)是微分算子,\(\psi{a,b,c}\)是三相磁链。
为了简化控制,通过坐标变换,将三相静止坐标系变换到两相旋转坐标系(dq坐标系)。在dq坐标系下,电压方程变得简洁明了:
\[
\begin{cases}
u{d} = R{s}i{d} + p\psi{d} - \omega{e}\psi{q} \\
u{q} = R{s}i{q} + p\psi{q} + \omega{e}\psi{d}
\end{cases}
\]
FOC矢量控制永磁同步电机全速域无位置传感器控制。 转子磁场定向控制 全速域无位置传感器控制 永磁同步电机PMSM 低速采用高频脉振方波注入法。 中高速采用改进的SMO滑膜观测器 。 转速切换区域采用的是加权切换法。 带有参考资料和说明文档,仿真模型。
其中\(u{d,q}\)是dq轴电压,\(i{d,q}\)是dq轴电流,\(\omega_{e}\)是电角速度。通过这种变换,我们可以像控制直流电机一样方便地控制PMSM的转矩和磁通。
全速域无位置传感器控制
在很多应用场景中,安装位置传感器会增加成本、降低系统可靠性,因此全速域无位置传感器控制技术显得尤为重要。
低速:高频脉振方波注入法
在低速时,电机反电动势很小,传统基于反电动势的位置估算方法失效。高频脉振方波注入法就像是给电机“挠痒痒”,通过注入高频信号,利用电机的凸极效应来获取位置信息。
以下是一段简单的模拟高频脉振方波注入的代码片段(以Python为例):
import numpy as np
import matplotlib.pyplot as plt
# 定义参数
T = 0.001 # 采样周期
t = np.arange(0, 1, T) # 时间向量
f = 1000 # 高频脉振方波频率
A = 1 # 幅值
# 生成高频脉振方波
square_wave = A * np.sign(np.sin(2 * np.pi * f * t))
plt.plot(t, square_wave)
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.title('High - frequency Pulsating Square Wave')
plt.grid(True)
plt.show()这段代码生成了一个幅值为1,频率为1kHz的高频脉振方波。实际应用中,这个方波会注入到电机控制系统中,通过检测电机的响应来估算转子位置。高频信号注入后,电机的电流响应会包含与转子位置相关的信息,通过对电流信号的解调处理,就可以提取出转子位置信息。
中高速:改进的SMO滑膜观测器
到了中高速阶段,电机反电动势较大,改进的滑膜观测器(SMO)闪亮登场。滑膜观测器利用电机的数学模型,通过对定子电流和电压的观测来估算转子位置和速度。
以传统SMO为例,其观测方程为:
\[
\begin{cases}
\hat{\omega}{e} = k{1}\text{sgn}(\hat{e}{\alpha}) + k{2}\hat{e}_{\alpha} \\
\hat{\theta}{e} = \int \hat{\omega}{e}dt
\end{cases}
\]
其中\(\hat{\omega}{e}\)是估算电角速度,\(\hat{\theta}{e}\)是估算电角度,\(\hat{e}{\alpha}\)是估算误差,\(k{1}, k_{2}\)是滑膜控制系数。然而传统SMO存在抖振问题,改进的SMO通过采用连续函数代替符号函数等方法来抑制抖振,提高位置估算精度。
转速切换区域:加权切换法
在转速切换区域,为了实现低速和中高速两种位置估算方法的平滑过渡,采用加权切换法。简单来说,就是根据当前转速,给高频脉振方波注入法和改进的SMO滑膜观测器的估算结果赋予不同的权重,使得两种方法的切换过程平稳无冲击。
假设当前转速为\(n\),低速方法估算位置为\(\theta{1}\),中高速方法估算位置为\(\theta{2}\),则最终估算位置\(\theta\)为:
\[
\theta = w{1}(n)\theta{1} + w{2}(n)\theta{2}
\]
其中\(w{1}(n)\)和\(w{2}(n)\)是与转速\(n\)相关的权重函数,且\(w{1}(n) + w{2}(n) = 1\)。
参考资料、说明文档与仿真模型
在实际研究和应用中,丰富的参考资料、详细的说明文档以及精确的仿真模型是不可或缺的。参考资料可以帮助我们深入理解相关理论知识,比如经典的电机学书籍以及IEEE上发表的相关论文。说明文档则为代码实现和系统搭建提供清晰的指导,从硬件连接到软件参数设置,每一个细节都应该在说明文档中有所体现。
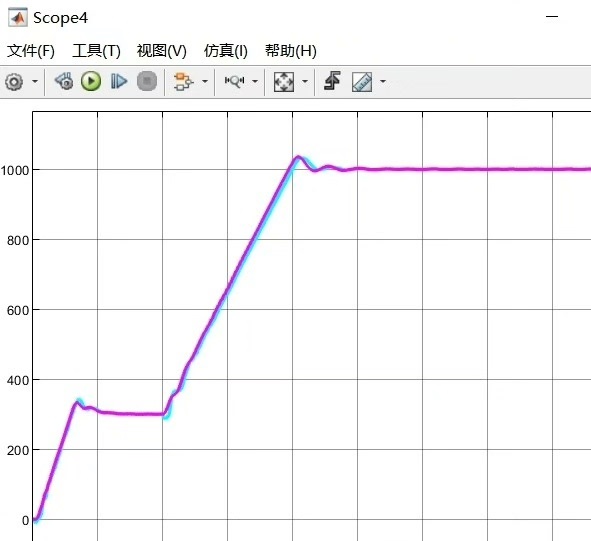
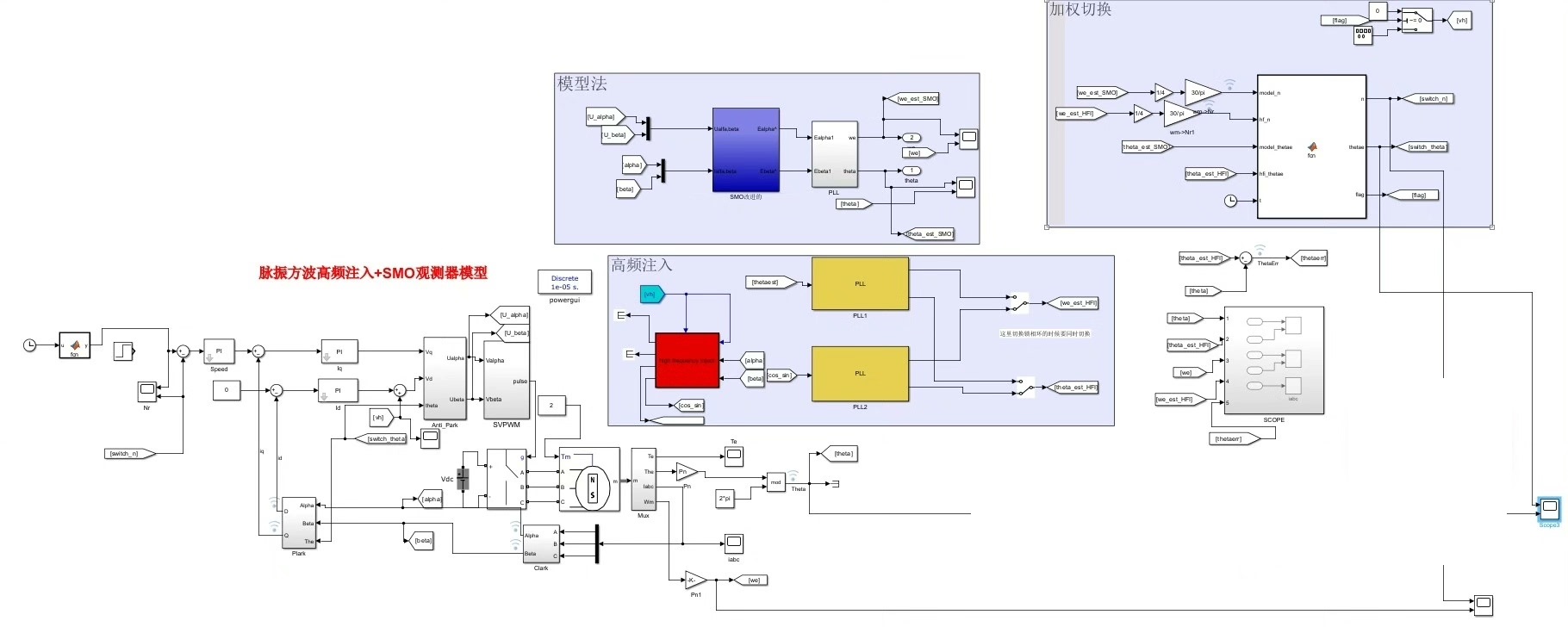
而仿真模型更是验证控制策略有效性的重要工具。以MATLAB/Simulink为例,可以搭建包含PMSM模型、FOC控制模块、无位置传感器估算模块的仿真系统。通过设置不同的工况,如不同的负载、转速变化等,观察电机的运行性能,验证我们所采用的全速域无位置传感器控制策略是否能够实现电机的稳定、高效运行。在仿真过程中,可以直观地看到转速、转矩、位置估算误差等参数的变化曲线,为进一步优化控制策略提供依据。
FOC矢量控制永磁同步电机全速域无位置传感器控制技术融合了多种巧妙的方法,从理论到实践,每一步都充满了挑战与机遇,为电机控制领域的发展注入了新的活力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)