PMSM电机控制三环控制仿真模型,供初学者学习。 模型包括电流环、转速环以及位置环
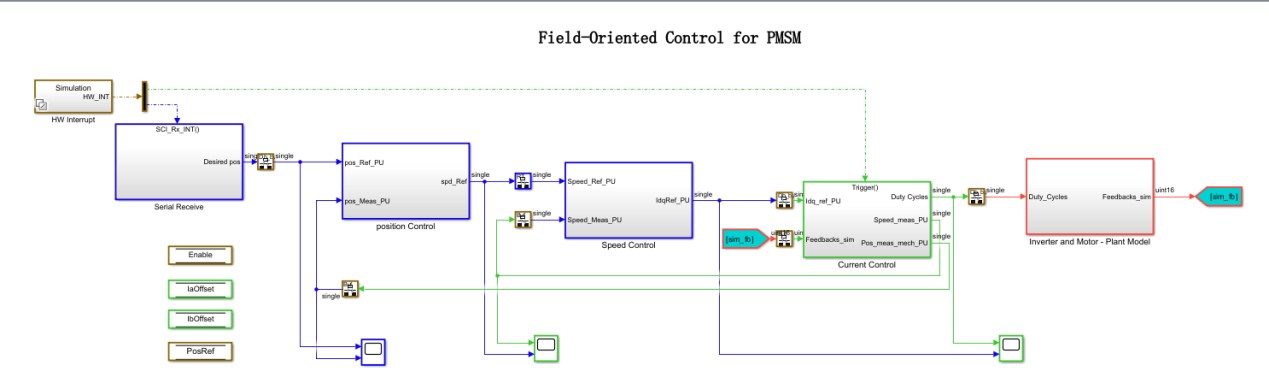
PMSM电机控制三环控制仿真模型,供初学者学习。 模型包括电流环、转速环以及位置环,包括传感器模型、PMSM模型以及逆变器模型,实际模型如下图所示。 模型通过输入预期转角,对电机进行控制,跟踪转角。 适用于MATLAB2023b及以上版本。
今天,我决定深入了解一下PMSM(永磁同步电机)的三环控制仿真模型。作为一个刚入门的小白,我对电机控制还不是很熟悉,但通过查阅资料,我发现三环控制是PMSM控制中的常见方法,包括电流环、转速环和位置环。听起来有点复杂,但我觉得只要一步步来,应该能搞明白。
什么是PMSM三环控制?
PMSM三环控制是一种多环嵌套的控制方法,从内到外分别是电流环、转速环和位置环。电流环负责控制电机的相电流,转速环控制电机的转速,位置环则控制电机的位置。通过这种分层控制,可以实现对电机的精确控制。
模型结构
模型包括以下几个部分:
- 电流环:控制电机的相电流,使其跟踪给定的电流参考值。
- 转速环:控制电机的转速,使其跟踪给定的转速参考值。
- 位置环:控制电机的位置,使其跟踪给定的位置参考值。
- 传感器模型:模拟电机的传感器,提供反馈信号。
- PMSM模型:模拟永磁同步电机的动态特性。
- 逆变器模型:模拟逆变器的动态特性,将控制信号转换为电机的驱动信号。
模型搭建步骤
- 搭建电流环
电流环是三环控制中最内层的环,负责控制电机的相电流。电流环的控制目标是使电机的相电流跟踪给定的电流参考值。
% 电流环控制
function [i_alpha, i_beta] = current_loop_control(voltage, current)
% 电流环控制算法
% 这里可以使用PI控制器或其他控制算法
% 这里只是一个示例
i_alpha = voltage(1) - current(1);
i_beta = voltage(2) - current(2);
end- 搭建转速环
转速环是三环控制中的中间环,负责控制电机的转速。转速环的控制目标是使电机的转速跟踪给定的转速参考值。
% 转速环控制
function [omega_r, omega_m] = speed_loop_control(reference_speed, measured_speed)
% 转速环控制算法
% 这里可以使用PI控制器或其他控制算法
% 这里只是一个示例
omega_r = reference_speed - measured_speed;
omega_m = reference_speed + measured_speed;
end- 搭建位置环
位置环是三环控制中最外层的环,负责控制电机的位置。位置环的控制目标是使电机的位置跟踪给定的位置参考值。
% 位置环控制
function [position_r, position_m] = position_loop_control(reference_position, measured_position)
% 位置环控制算法
% 这里可以使用PI控制器或其他控制算法
% 这里只是一个示例
position_r = reference_position - measured_position;
position_m = reference_position + measured_position;
end- 搭建传感器模型
传感器模型负责提供电机的反馈信号,包括相电流、转速和位置。
% 传感器模型
function [feedback] = sensor_model(i_alpha, i_beta, omega, position)
% 传感器模型
% 这里可以模拟传感器的噪声和漂移
% 这里只是一个示例
feedback.i_alpha = i_alpha + randn;
feedback.i_beta = i_beta + randn;
feedback.omega = omega + randn;
feedback.position = position + randn;
end- 搭建PMSM模型
PMSM模型负责模拟永磁同步电机的动态特性。
% PMSM模型
function [voltage, torque] = pmsm_model(i_alpha, i_beta, omega)
% PMSM模型
% 这里可以模拟PMSM的电磁特性
% 这里只是一个示例
voltage = [i_alpha + omega * i_beta, i_beta - omega * i_alpha];
torque = i_alpha * i_beta;
end- 搭建逆变器模型
逆变器模型负责将控制信号转换为电机的驱动信号。
% 逆变器模型
function [voltage] = inverter_model(duty_cycle)
% 逆变器模型
% 这里可以模拟逆变器的动态特性
% 这里只是一个示例
voltage = duty_cycle * 12;
end模型仿真
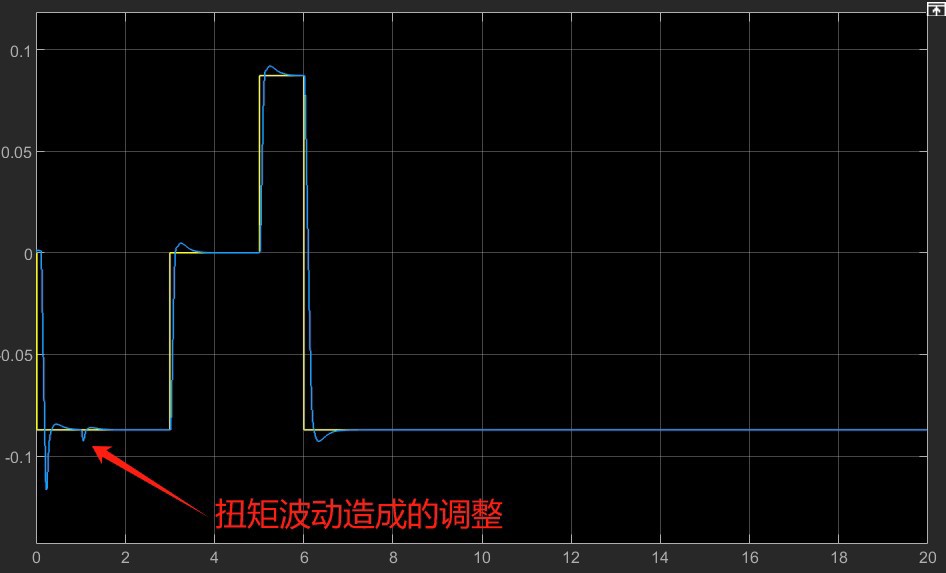
通过输入预期转角,对电机进行控制,跟踪转角。模型适用于MATLAB2023b及以上版本。
% 主程序
function main()
% 初始化
reference_position = 0;
measured_position = 0;
reference_speed = 0;
measured_speed = 0;
i_alpha = 0;
i_beta = 0;
omega = 0;
voltage = [0, 0];
duty_cycle = 0;
% 仿真循环
for t = 1:1000
% 位置环控制
[position_r, position_m] = position_loop_control(reference_position, measured_position);
% 转速环控制
[omega_r, omega_m] = speed_loop_control(reference_speed, measured_speed);
% 电流环控制
[i_alpha, i_beta] = current_loop_control(voltage, [i_alpha, i_beta]);
% PMSM模型
[voltage, torque] = pmsm_model(i_alpha, i_beta, omega);
% 逆变器模型
duty_cycle = inverter_model(duty_cycle);
% 传感器模型
feedback = sensor_model(i_alpha, i_beta, omega, measured_position);
% 更新状态
measured_position = position_r + position_m;
measured_speed = omega_r + omega_m;
end
end总结
通过以上步骤,我成功搭建了一个PMSM三环控制仿真模型。这个模型包括电流环、转速环和位置环,以及传感器模型、PMSM模型和逆变器模型。通过输入预期转角,可以对电机进行控制,跟踪转角。这个模型适用于MATLAB2023b及以上版本。
PMSM电机控制三环控制仿真模型,供初学者学习。 模型包括电流环、转速环以及位置环,包括传感器模型、PMSM模型以及逆变器模型,实际模型如下图所示。 模型通过输入预期转角,对电机进行控制,跟踪转角。 适用于MATLAB2023b及以上版本。
虽然这个模型只是一个示例,但通过它,我可以更好地理解PMSM三环控制的基本原理和实现方法。希望这篇博文能对其他初学者有所帮助,如果有任何问题,欢迎留言讨论!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)