基于Matlab的三相永磁同步电机矢量控制设计与实现:探索其结构、数学模型与控制策略的深入理解...
基于Matlab的三相永磁同步电机矢量控制设计 本设计包括设计报告,仿真程序。 课题意义 与传统的交流同步电机、直流电机、交流异步电机三种电机形式相比较,永磁式同步电机有体积小、重量轻、控制简单等优点,因此在各种功率等级的场合得到越来越多的应用。 永磁同步电机的控制是永磁同步电机应用的关键技术,矢量控制又是应用最普遍的、性能优良的一种控制方式。 因此,对永磁同步电机的矢量控制分析,具有很重要的理论研究意义和实用价值。 在这种背景下,本文致力丁研究永磁同步电机矢量控制技术。 通过对永磁同步电机结构、数学模型以及矢量控制实现方式的研究来深入理解永磁同步电机矢量控制思想。
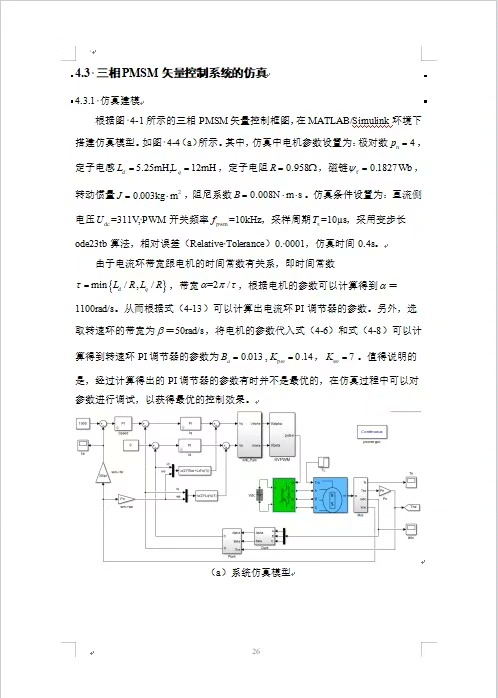
直接打开Matlab/Simulink,新建一个空白模型。拖几个坐标变换模块出来,先别急着连线——咱们得搞明白为啥要把三相电流变来变去。永磁同步电机的定子电流在ABC坐标系下看着像三条正弦波互相追逐,这时候要是直接控制,就像在游乐园旋转木马上抓移动靶子,费劲不说还容易翻车。
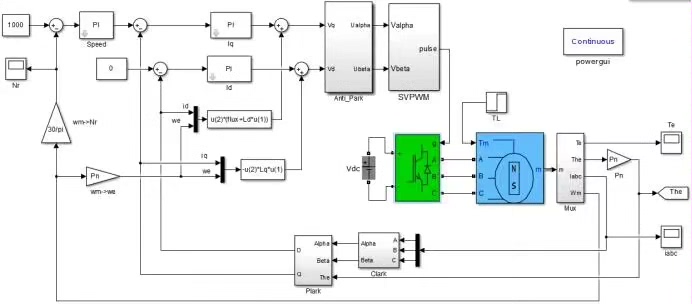
所以得用Clark变换把三相电流拍扁成两相静止坐标系,简单来说就是把三维问题降维到二维战场。Matlab里这个函数实现特别有意思:
function [i_alpha, i_beta] = clark_transform(ia, ib, ic)
i_alpha = ia;
i_beta = (ib - ic)/sqrt(3);
end其实这就是把三相电流投影到αβ轴,注意这里ib和ic的系数差会产生正交效果。仿真时遇到过有趣的现象:当电机堵转时,这三个电流波形会突然变成三条笔直的直线,活像示波器死机时的模样。
接着是Park变换,这个环节最容易让新人懵圈。简单说就是把旋转坐标系"粘"在转子上跟着一起转,这时候看电流就像站在旋转木马中心观察靶子,靶子突然就静止了。Matlab官方给的Park变换模块内部藏着这样的玄机:
function [id, iq] = park_transform(i_alpha, i_beta, theta)
cos_theta = cos(theta);
sin_theta = sin(theta);
id = i_alpha.*cos_theta + i_beta.*sin_theta;
iq = -i_alpha.*sin_theta + i_beta.*cos_theta;
end重点在theta这个旋转角度,实测时如果编码器信号有毛刺,这里会突然冒出来类似心电图室颤的波形。上次调试时就因为光电编码器接线松动,导致theta跳变,整个控制系统当场表演了"电机动感舞步"。
基于Matlab的三相永磁同步电机矢量控制设计 本设计包括设计报告,仿真程序。 课题意义 与传统的交流同步电机、直流电机、交流异步电机三种电机形式相比较,永磁式同步电机有体积小、重量轻、控制简单等优点,因此在各种功率等级的场合得到越来越多的应用。 永磁同步电机的控制是永磁同步电机应用的关键技术,矢量控制又是应用最普遍的、性能优良的一种控制方式。 因此,对永磁同步电机的矢量控制分析,具有很重要的理论研究意义和实用价值。 在这种背景下,本文致力丁研究永磁同步电机矢量控制技术。 通过对永磁同步电机结构、数学模型以及矢量控制实现方式的研究来深入理解永磁同步电机矢量控制思想。
电流环设计最考验耐心,PI参数整定就像在钢丝上跳芭蕾。有个取巧的办法:先把速度环断开,单独调电流环。这时候在Simulink里搭个测试环境,突然给个阶跃信号,观察电流响应。记得有次把积分系数调太大,电机启动瞬间电流直接飙到限幅值,实验室的空气开关配合地跳闸了,完美演绎了什么叫"理论联系实际"。
速度观测模块藏着不少猫腻,特别是当电机低速运行时,传统测速法精度急剧下降。这时候得祭出磁链观测器这种黑科技,代码实现时要注意这个细节:
function omega = flux_observer(v_alpha, v_beta, i_alpha, i_beta, R, L)
persistent psi_alpha_prev psi_beta_prev;
Ts = 0.0001; % 采样时间
psi_alpha = psi_alpha_prev + (v_alpha - R*i_alpha)*Ts;
psi_beta = psi_beta_prev + (v_beta - R*i_beta)*Ts;
omega = (psi_alpha.*i_beta - psi_beta.*i_alpha)/(psi_alpha^2 + psi_beta^2);
% 更新状态
psi_alpha_prev = psi_alpha;
psi_beta_prev = psi_beta;
end这个观测器在空载时表现良好,但带上负载后会出现类似老电视雪花屏的噪声,这时候需要在算法里加点数字滤波的佐料。有次忘记做滤波处理,速度反馈信号抖得比手机振动马达还厉害,导致整个系统陷入"帕金森模式"。
最后把各个模块像拼乐高一样组装起来,点击运行前记得保存——别问为什么,都是血泪教训。当看到转速曲线终于平滑地跟踪上设定值,那种成就感堪比第一次骑自行车不摔跤。不过别高兴太早,切换负载的瞬间可能会看到电流环突然"抽风",这时候就得回到PI参数从头再来一遍。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)