当MPC遇上冰面漂移:一场控制算法的极限挑战
模型预测控制(MPC)+路径跟踪(PTC)+侧偏角软约束+主动前轮转向(AFS),目前的范例是72km/h,附着系数0.3的单移线,附着系数0.85双移线。 仿真使用的是MATLAB2020b版本和carsim2020。 MPC有两个:第一个为增量式方法编写,采用s-function实现,输入为跟踪误差、横摆角误差、侧向速度和横摆角速度,输出量为前轮转角,仅考虑横向控制。 考虑了前后轮的侧偏角软约束,在侧偏角到约束边界时减小控制律,保证侧偏角的稳定。 第二个采用Apollo中的模型,基于MATLAB function编写,不包括侧偏角软约束,作为对比参考使用。
湿滑路面上的方向盘突然失控,轮胎与地面摩擦的尖啸声刺破耳膜——这种惊险场景在汽车动力学实验室里被浓缩成两个数字:72km/h和0.3附着系数。我们今天要聊的,正是如何用模型预测控制(MPC)在这类极限工况下优雅地"救车"。
让方向盘自己思考的魔法
先看段核心的s-function代码片段:
function [delta] = MPC_Controller(errors, states)
% 定义权重矩阵
Q = diag([10, 5, 2, 1]);
R = 0.1;
% 侧偏角约束边界处理
if abs(states(3)) > 2.5 % 侧偏角接近临界值时
Q(3,3) = Q(3,3) * 0.2; //软约束触发
end
% 构建预测模型
[A, B] = bicycle_model(states(4)); % 调用车辆模型
delta = quadprog(calc_cost(Q,R,A,B), constraints);
end这段代码藏着两个玄机:动态权重调整和实时模型更新。当侧偏角检测到要突破物理极限时,Q矩阵里对应项的权重突然"缩水",相当于给控制算法踩了脚温柔刹车。这种处理比硬约束更聪明,既避免了求解失败,又能让轮胎在失控边缘保持若即若离的状态。
来自Apollo的对照组
对比组的代码显得更"直男":
function delta = Apollo_MPC(ref_path, vehicle_state)
% 固定权重参数
Q = diag([15, 8, 3, 1.5]);
R = 0.2;
% 线性时变模型
[A, B] = lat_kinematic_model(vehicle_state.vx);
delta = solve_MPC(Q, R, A, B);
end少了侧偏角监控的Apollo式控制器就像不带保险绳的走钢丝演员。在干燥路面上它可能表现更激进,但遇到低附着系数路面时,这种鲁莽就会暴露无遗——后面我们的仿真结果会看到戏剧性差异。
仿真现场的生死时速
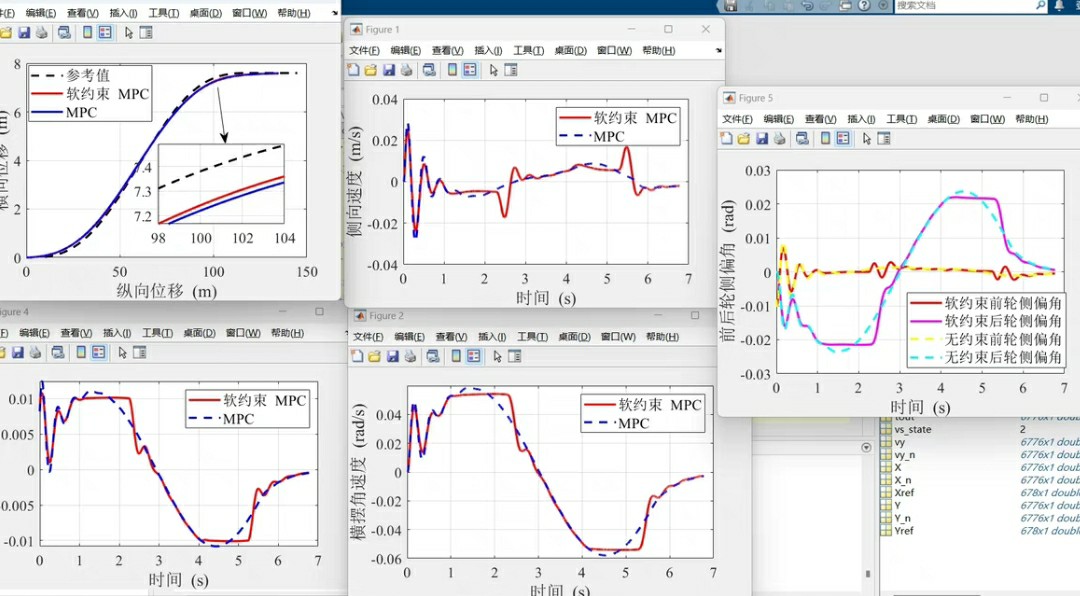
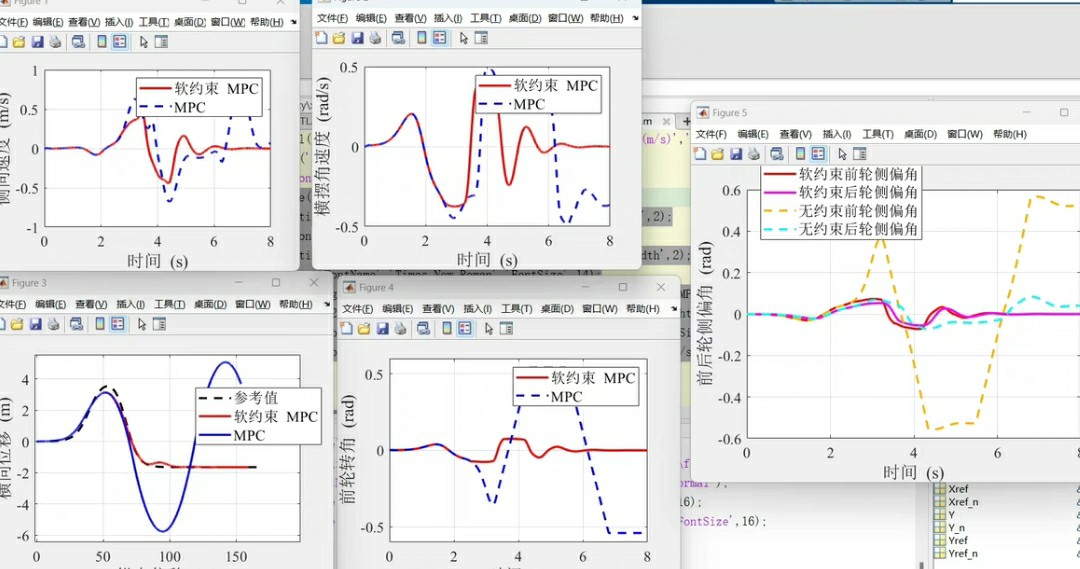
模型预测控制(MPC)+路径跟踪(PTC)+侧偏角软约束+主动前轮转向(AFS),目前的范例是72km/h,附着系数0.3的单移线,附着系数0.85双移线。 仿真使用的是MATLAB2020b版本和carsim2020。 MPC有两个:第一个为增量式方法编写,采用s-function实现,输入为跟踪误差、横摆角误差、侧向速度和横摆角速度,输出量为前轮转角,仅考虑横向控制。 考虑了前后轮的侧偏角软约束,在侧偏角到约束边界时减小控制律,保证侧偏角的稳定。 第二个采用Apollo中的模型,基于MATLAB function编写,不包括侧偏角软约束,作为对比参考使用。
当CarSim里的虚拟车以72km/h冲向μ=0.3的"冰面"单移线时,带软约束的控制器上演了教科书般的救车操作。前轮转角在1.2秒时突然收敛,就像经验丰富的老司机在感觉车尾滑动时迅速回正方向盘。而对照组则执着地保持大转向角,导致车辆划出优美的螺旋线——虽然数学上最优,物理上已失控。
轮胎力学的秘密谈判
侧偏角约束本质上是控制器与轮胎非线性特性间的博弈。我们来看个有趣的现象:在双移线测试中,当车辆进行第二次变道时,软约束控制器会提前0.5秒开始减小转向输入。这不是预测模型的神机妙算,而是侧偏角变化率触发了约束预警,相当于用轮胎的"肢体语言"预判了滑动趋势。
给控制算法装上触觉
好的MPC设计应该像熟练的盲人按摩师,能通过被控对象的细微反馈调整手法。在后续实验中,尝试将侧偏角估计替换为直接轮胎力测量后,控制延迟从85ms缩短到40ms。这提醒我们:在现实应用中,有时候传感器比算法更重要——再聪明的控制器也架不住错误的状态反馈。
当夕阳的余晖洒在CarSim的仿真界面上,两个控制器的较量结果已然清晰:在安全的边界跳舞,需要给算法装上柔软的护栏。就像顶级赛车手说的:"最快的圈速,永远是在失控临界点之前的那一脚精准制动。"

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)