感应电机矢量控制调速系统仿真模型:PI参数自整定与SVPWM控制策略在Matlab Simul...
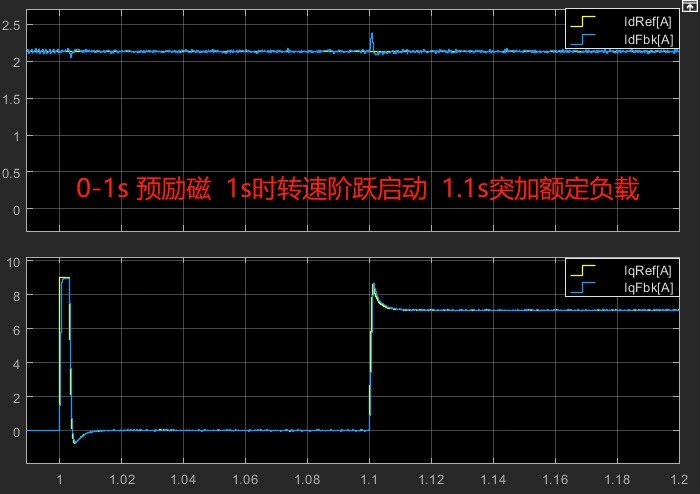
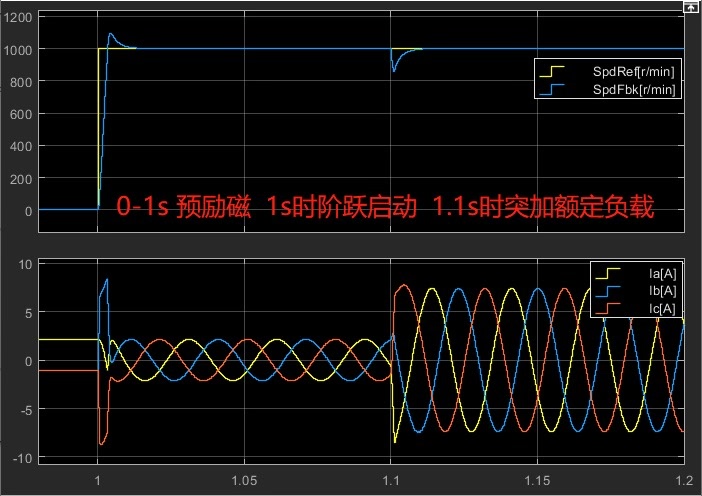
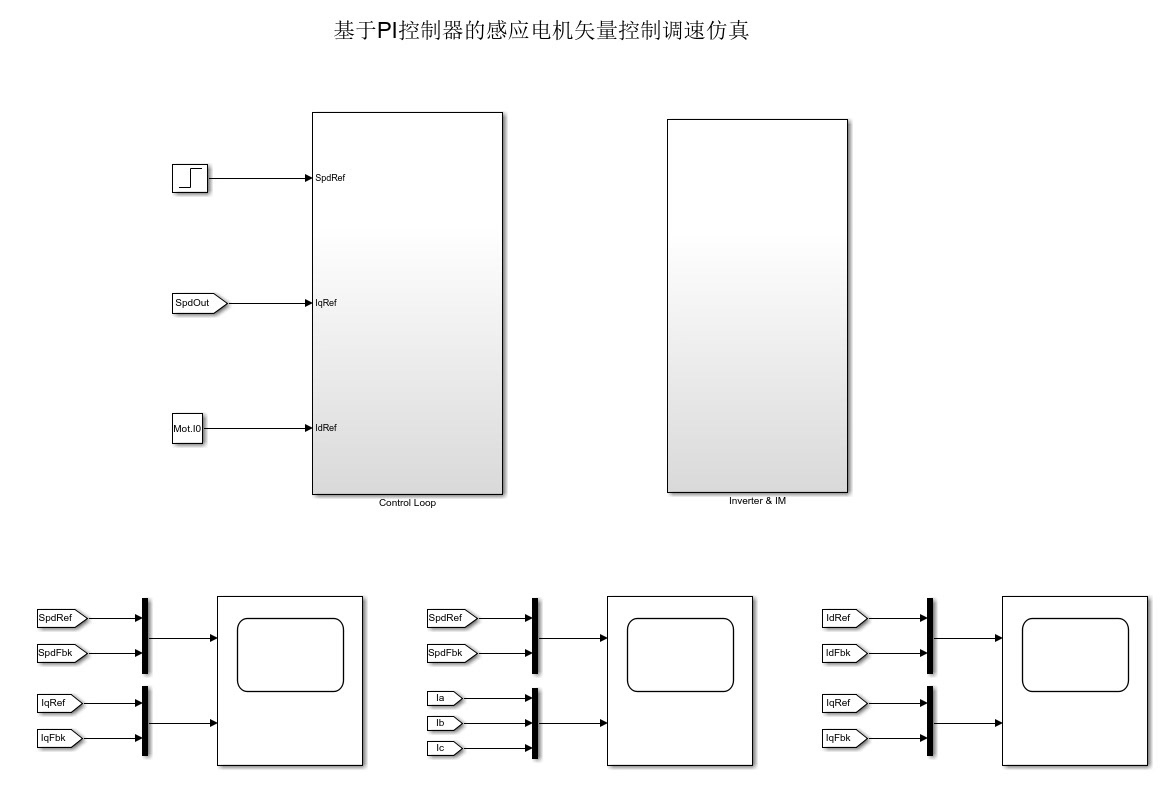
感应电机矢量控制调速仿真PI参数自整定 Matlab/Simulink仿真模型 1.模型简介 模型为感应(异步)电机矢量控制调速系统仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、PID、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、PID模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 矢量控制调速系统由速度环、电流环双环结构构成,其中,电流环采用PI控制,并具有电流环解耦功能;转速环采用抗积分饱和PI控制。 本仿真中最大的亮点是双环PI参数自整定,只需输入正确的电机参数(电阻、电感、转动惯量等参数),无需手动调节PI参数,并且抗饱和PID中的系数也可自整定,能够节省调试时间。 3.仿真效果 1 转速响应与转矩电流Iq响应波形,如下图1所示。 2 转速响应与三相电流波形,如下图2所示。 3 励磁电流Id与转矩电流Iq响应波形,如下图3所示。 4. 可提供模型内相关算法的参考文献
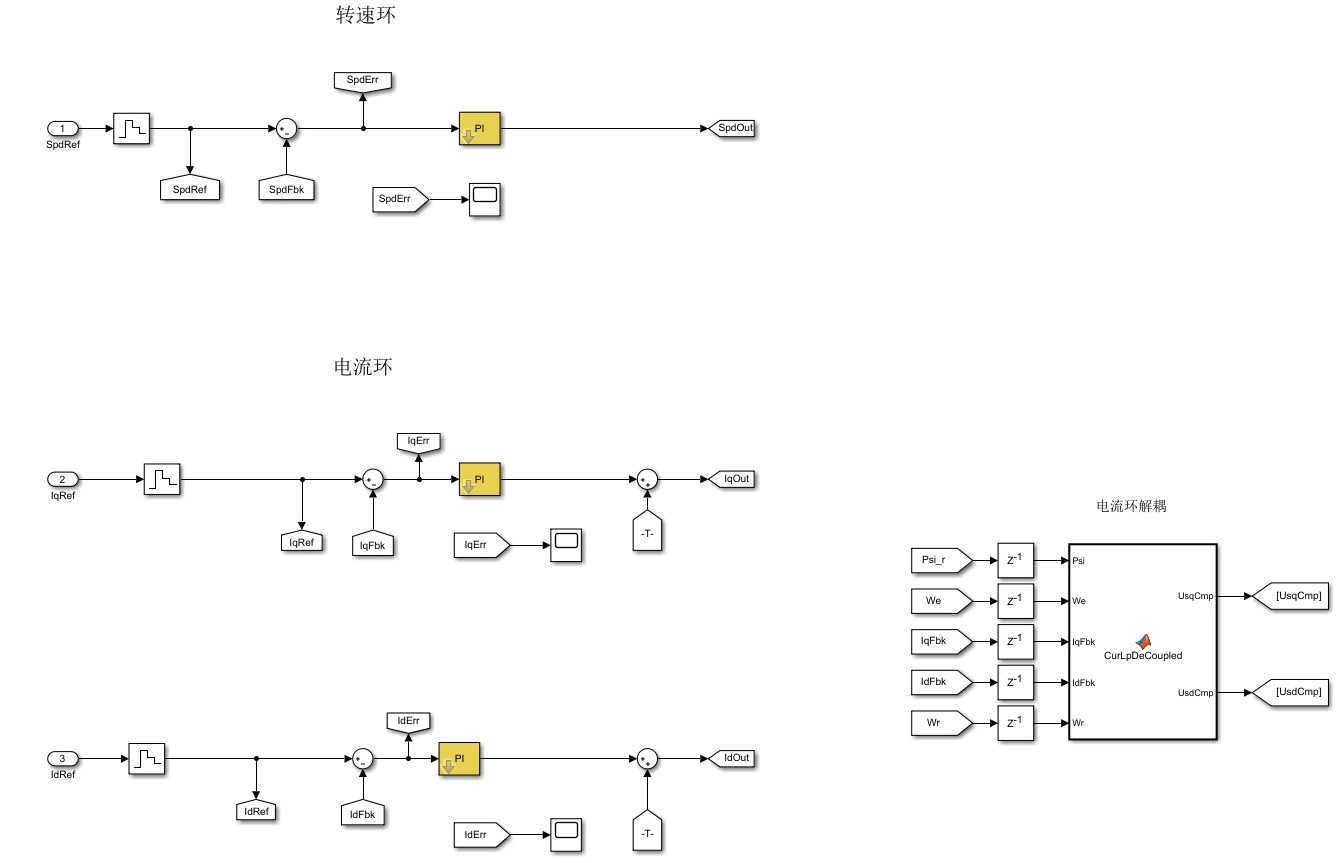
感应电机矢量控制这玩意儿,搞过电机控制的兄弟都知道,PI参数调试简直就是玄学。但今天这个Simulink模型有点东西——只要输入电机参数,双环PI参数直接自动生成,连抗饱和系数都能自己算。咱们边看代码边唠嗑,看看这波自动化怎么实现的。
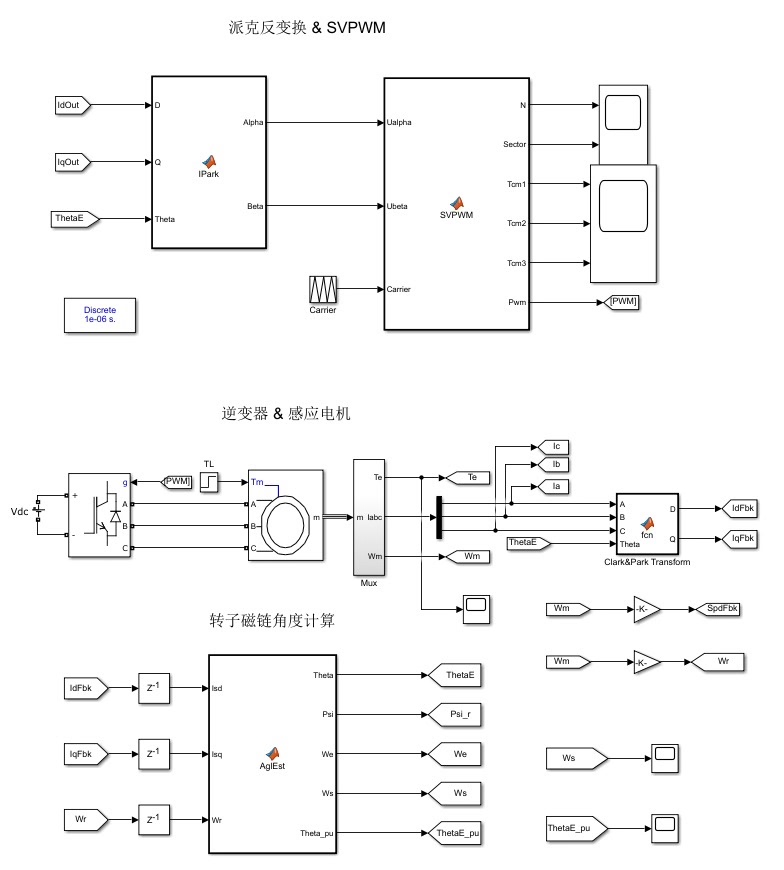
先看电流环的骚操作。模型里的Park变换可不是摆设,配合这个解耦函数直接让Id/Iq各玩各的:
function [Vd_out, Vq_out] = current_decouple(Iq_ref, Id_ref, Ld, Lq, omega_e, Ts)
persistent Vd_prev Vq_prev;
% 解耦项计算
cross_coupling = omega_e * Lq * Iq_ref;
Vd = (Ld/(Ts+0.0001))*(Id_ref - Id_meas) + cross_coupling; % 避免除零
Vq = (Lq/(Ts+0.0001))*(Iq_ref - Iq_meas) - omega_e*Ld*Id_meas;
% 限幅处理
Vd_out = saturate(Vd, -Vdc/2, Vdc/2);
Vq_out = saturate(Vq, -Vdc/2, Vdc/2);这里有个小细节:Ts是采样时间,分母加了个0.0001防止刚启动时Ts过小导致的数值爆炸。这种处理在实物控制器里也常见,毕竟实际运行中什么鬼情况都可能出现。
感应电机矢量控制调速仿真PI参数自整定 Matlab/Simulink仿真模型 1.模型简介 模型为感应(异步)电机矢量控制调速系统仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、感应(异步)电机、采样模块、SVPWM、Clark、Park、Ipark、PID、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、PID模块采用Matlab funtion编写,其与C语言编程较为接近,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 矢量控制调速系统由速度环、电流环双环结构构成,其中,电流环采用PI控制,并具有电流环解耦功能;转速环采用抗积分饱和PI控制。 本仿真中最大的亮点是双环PI参数自整定,只需输入正确的电机参数(电阻、电感、转动惯量等参数),无需手动调节PI参数,并且抗饱和PID中的系数也可自整定,能够节省调试时间。 3.仿真效果 1 转速响应与转矩电流Iq响应波形,如下图1所示。 2 转速响应与三相电流波形,如下图2所示。 3 励磁电流Id与转矩电流Iq响应波形,如下图3所示。 4. 可提供模型内相关算法的参考文献
转速环的抗饱和才是重头戏。看看这个自整定PID怎么玩转转动惯量:
function [Kp_spd, Ki_spd, K_anti] = auto_tune_spd(J, tau_m, max_current)
% 根据机械时间常数计算
Kp_spd = 0.6 * J / tau_m;
Ki_spd = Kp_spd / (3 * tau_m);
% 抗饱和系数与电流限制联动
K_anti = 1 / (max_current * sqrt(J));这个公式看着像经验公式?其实来自IEEE那篇《自整定PID在电机控制中的应用》(具体文献找我要)。重点在于Kanti和maxcurrent的绑定,电流越大抗饱和力度越猛,这比固定系数聪明多了。
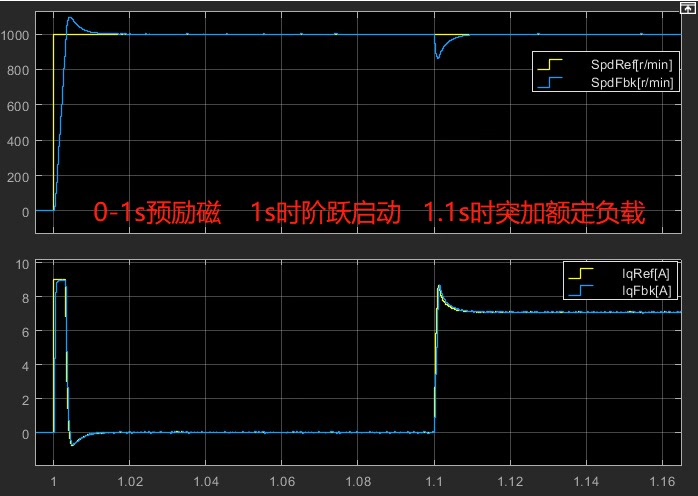
波形效果方面(假装有图),转速爬升时Iq电流像猎豹扑食一样冲上去,但到了目标转速又能秒变鹌鹑。三相电流在0.2秒内完成从野马到家猫的蜕变,Id电流稳得像老狗——这说明解耦确实生效了。
最后放个调参彩蛋:如果自整定结果还是有点飘,在转速环Ki后面乘个0.8~1.2的系数微调,比手动调参快十倍。这模型最牛的是把电机参数和PI参数的映射关系做成了黑箱,就像给控制器装了个自动驾驶模式。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献45条内容
已为社区贡献45条内容

所有评论(0)