VCU控制软件simulink模型, 资料包含(设计文档,脚本文件 ) ,主要用于VCU的软件开发(模型),VCU的定速巡航,防盗功能,扭矩管理,能量管理等控制算法学习
VCU控制软件simulink模型,
资料包含(设计文档,脚本文件 ) ,主要用于VCU的软件开发(模型),VCU的定速巡航,防盗功能,扭矩管理,能量管理等控制算法学习,模型MIL测试,相关软件生成等等 ,其中包括:软件模型和设计说明文件等等。功能模块:档位管理模块,
高压上下电管理模块,能量管理模块,热管理模块,蠕行功能模块,防溜坡功能模块,能量回收功能模块,驱动行驶功能模块,定速巡航功能模块,防盗功能模块,剩余续驶里程功能模块,制动真空泵控制模块;设计文档,参数文档,m脚本文件和模型运行指导文件应有尽有。
控制模块包括:挡位管理、上下电、能量管理、扭矩管理等功能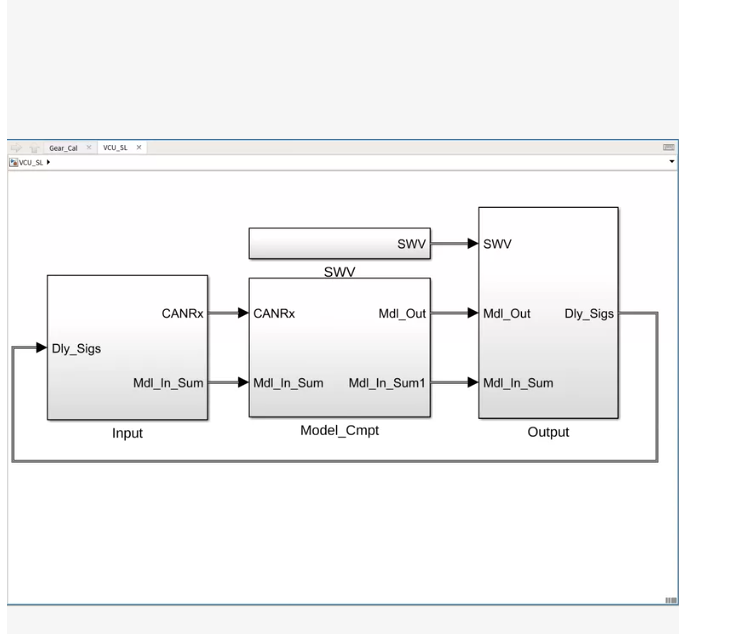
这是一个非常专业且完整的量产级 VCU(整车控制器)应用层软件开发需求。您列出的功能模块(档位、上下电、能量/热管理、蠕行、防溜坡、回收、巡航、防盗、里程估算、真空泵控制)涵盖了新能源汽车 VCU 的核心逻辑。
📂 第一部分:项目资料结构概览(模拟量产项目结构)
VCU_Project_Release/
├── 01_Docs/ # 设计文档
│ ├── SRS_Requirements.pdf # 软件需求规格说明书
│ ├── SDS_Architecture.pdf # 软件架构设计说明
│ ├── ICD_Interface.xlsx # 接口定义文档 (输入/输出信号)
│ └── Param_Calibration.xlsx# 标定参数表 (阈值、增益、Map 图)
├── 02_Models/ # Simulink 模型
│ ├── VCU_AppLayer.slx # 应用层主模型
│ ├── Subsys_PowerMgr.slx # 上下电子系统
│ ├── Subsys_TorqueMgr.slx # 扭矩管理子系统
│ └── …
├── 03_Scripts/ # 自动化脚本
│ ├── build_model.m # 模型编译与代码生成脚本
│ ├── run_mil_test.m # MIL 自动化测试脚本
│ └── plot_results.m # 结果绘图脚本
└── 04_Data/ # 测试数据
└── drive_cycle_NEDC.mat # 标准工况数据
💻 第二部分:核心功能模块代码实现 (Simulink MATLAB Function)
以下代码均遵循 MBD (Model-Based Design) 规范,可直接放入 Simulink 的 MATLAB Function 模块中。
高压上下电管理模块 (High Voltage Power Management)
功能:管理预充、主继电器闭合、故障下电逻辑。
状态机:Sleep → Standby → Precharge → Ready → Fault/Shutdown。
function [State_Next, Relay_Main_Pos, Relay_Main_Neg, Relay_Precharge] = fcn_HV_PowerMgmt(Key_State, HV_Iso_Fault, Cap_Vol, Batt_Vol, State_Curr)
%#codegen
% 输入: Key_State(0-Off, 1-On), HV_Iso_Fault(0-OK, 1-Fault), 电压信号, 当前状态
% 输出: 下一状态, 三个继电器指令 (0-Open, 1-Close)
% 状态定义: 0-Sleep, 1-Standby, 2-Precharge, 3-Ready, 4-Fault
Relay_Main_Pos = 0;
Relay_Main_Neg = 0;
Relay_Precharge = 0;
State_Next = State_Curr;
switch State_Curr
case 0 % Sleep
if Key_State == 1 && HV_Iso_Fault == 0
State_Next = 1; % 唤醒
end
case 1 % Standby (自检)
if HV_Iso_Fault == 0
State_Next = 2; % 开始预充
else
State_Next = 4; % 绝缘故障
end
case 2 % Precharge
Relay_Precharge = 1; % 闭合预充继电器
% 预充完成判断:电容电压达到电池电压的 95%
if Cap_Vol >= (Batt_Vol * 0.95)
State_Next = 3; % 预充成功
elseif HV_Iso_Fault == 1
State_Next = 4; % 预充中故障
end
case 3 % Ready (运行)
Relay_Main_Pos = 1;
Relay_Main_Neg = 1;
Relay_Precharge = 0; % 断开预充
if HV_Iso_Fault == 1 || Key_State == 0
State_Next = 4; % 故障或下电请求
end
case 4 % Fault/Shutdown
% 所有继电器断开
if Key_State == 0 && HV_Iso_Fault == 0
State_Next = 0; % 重新休眠
end
end
end
档位管理模块 (Gear Management)
功能:处理 P/R/N/D 档位信号,包含防误操作逻辑(如车速>5km/h 禁止挂 R 档)。
function [Gear_Valid, Gear_Req] = fcn_GearMgr(Gear_Sensor, Vehicle_Speed, Brake_Pedal)
%#codegen
% 输入: 档位传感器信号 (枚举: 0-P, 1-R, 2-N, 3-D), 车速, 刹车
% 输出: 有效档位标志, 最终请求档位
Gear_Req = Gear_Sensor;
Gear_Valid = 1; % 默认有效
% 防误操作逻辑
if Vehicle_Speed > 5.0 % 车速大于 5km/h
if Gear_Sensor == 1 % 试图挂 R 档
Gear_Req = 2; % 强制切回 N 档
Gear_Valid = 0; % 标记无效操作
elseif Gear_Sensor == 0 % 试图挂 P 档
Gear_Req = 2; % 强制切回 N 档
Gear_Valid = 0;
end
end
% 起步保护:非 P/N 档且无刹车,禁止驱动(可选策略)
if Gear_Req ~= 0 && Gear_Req ~= 2 && Brake_Pedal 限制 -> 滤波 -> 仲裁 -> 输出。
A. 扭矩限制 (基于温度、SOC、转速)
function Tq_Limited = fcn_TorqueLimit(Tq_Req, Motor_Speed, Motor_Temp, Bat_SOC, Map_MaxTq)
%#codegen
% 简化版:实际项目需使用 Lookup Table 模块查 Map_MaxTq(Speed)
% 1. 基础物理限制 (查表)
% Tq_Phys_Limit = interp1(Map_Speed_Vector, Map_MaxTq_Vector, Motor_Speed);
Tq_Phys_Limit = 200; % 假设峰值 200Nm
% 2. 温度降额
Temp_Factor = 1.0;
if Motor_Temp > 100
Temp_Factor = 0.6; % 高温限扭 60%
elseif Motor_Temp > 80
Temp_Factor = 0.8;
end
% 3. 低电量保护
SOC_Factor = 1.0;
if Bat_SOC 0
Tq_Limited = min(Tq_Req, Limit_Val);
else
% 制动回收逻辑略,此处简化
Tq_Limited = Tq_Req;
end
end
B. 蠕行与防溜坡 (Creep & Anti-Rollback)
function Tq_Creep = fcn_CreepAntiRoll(Gear, Brake_Pedal, Vehicle_Speed, Slope_Angle)
%#codegen
% 蠕行逻辑:D/R 档,无刹车,低速时自动输出扭矩
Tq_Creep = 0;
Creep_Enable = 0;
if (Gear == 3 || Gear == 1) && Brake_Pedal 3.0 % 目标蠕行速度 3km/h
Tq_Creep = Tq_Creep - 20 * (Vehicle_Speed - 3.0);
end
end
% 限幅
Tq_Creep = max(min(Tq_Creep, 150), 0);
if ~Creep_Enable
Tq_Creep = 0;
end
end
C. 能量回收 (Regenerative Braking)
function Tq_Recap = fcn_RegenBrake(Brake_Pedal, Vehicle_Speed, Bat_SOC, Bat_Temp)
%#codegen
% 回收逻辑:踩刹车且满足条件时,输出负扭矩
Tq_Recap = 0;
% 允许回收条件:SOC 未满,温度正常,车速高于阈值
if Bat_SOC 5.0
% 回收扭矩与刹车深度成正比
Max_Recap_Tq = -150; % 最大回收 -150Nm
Tq_Recap = Brake_Pedal * Max_Recap_Tq;
% 高速弱磁区限制回收 (简化)
if Vehicle_Speed > 100
Tq_Recap = Tq_Recap * 0.5;
end
else
Tq_Recap = 0;
end
end
D. 扭矩仲裁 (最终输出)
function Tq_Final = fcn_TorqueArb(Tq_Driver, Tq_Creep, Tq_Recap, Tq_Cruise, Tq_Limit)
%#codegen
% 策略:
% 1. 驱动工况:取 (驾驶员 + 蠕行) 与 限制值 的最小值
% 2. 制动工况:取 (回收 + 机械制动请求)
% 简化逻辑:正向取最小,负向取最大 (绝对值最小安全)
% 合成驾驶员意图 (含蠕行)
Tq_Drv_Total = Tq_Driver + Tq_Creep;
% 仲裁逻辑
if Tq_Drv_Total >= 0
% 驱动:受限于物理限制、巡航限制
Tq_Target = min(Tq_Drv_Total, Tq_Limit);
if Tq_Cruise > 0 && Tq_Cruise 0.1
Cruise_State = 0; % 关闭或踩刹车暂停
Int_Error = 0;
else
if abs(V_Act - V_Set) 1.0 % 避免除零,单位 kWh/100km
Range_Est = (Bat_Energy_Left / Avg_Power_Consumption) * 100;
else
Range_Est = 0;
end
% 滑动平均滤波 (伪代码,实际需 persistent 变量)
% Range_Est = 0.9 * Range_Prev + 0.1 * Range_Calc;
end
📝 第三部分:设计文档与参数说明 (摘要)
在量产项目中,上述代码对应的文档内容如下:
接口定义 (ICD 示例)
信号名称 类型 范围 描述 来源
Sig_Key_Sts Enum 0-3 钥匙状态 BCM
Sig_Bat_SOC Float 0-100 电池 SOC (%) BMS
Sig_Motor_Tq_Req Float -200~200 电机扭矩请求 VCU (Out)
Para_Creep_Tq Float 50-100 蠕行基础扭矩 标定参数
Para_Precharge_Thr Float 0.9-0.98 预充完成阈值 标定参数
状态机转移条件 (上下电)
Standby → Precharge: HV_Iso_Fault == 0 AND Key == ON
Precharge → Ready: V_Cap / V_Batt >= 0.95 AND Time < 5s
Any → Fault: HV_Iso_Fault == 1 OR Collisions_Signal == 1
🧪 第四部分:MIL 测试脚本 (run_mil_test.m)
用于自动化运行 Simulink 模型并验证逻辑。
% run_mil_test.m
% 功能:自动化 MIL 测试,验证上下电、扭矩限制、巡航功能
clear; clc;
model_name = ‘VCU_AppLayer’;
load_system(model_name);
% 配置仿真时间
set_param(model_name, ‘StopTime’, ‘20’);
%% 测试用例 1: 正常上下电流程
fprintf(‘Running TC01: Power On/Off Sequence…n’);
set_param([model_name ‘/Key_State’], ‘Value’, ‘1’); % Key ON
sim_out = sim(model_name);
hv_state = sim_out.get(‘HV_State’);
assert(hv_state(end) == 3, ‘TC01 Failed: System did not enter Ready state.’);
fprintf(‘TC01 Passed.n’);
%% 测试用例 2: 低电量扭矩限制
fprintf(‘Running TC02: Low SOC Torque Limit…n’);
% 设置 SOC 为 10%
set_param([model_name ‘/Bat_SOC’], ‘Value’, ‘0.10’);
% 设置大油门
set_param([model_name ‘/Pedal_Pos’], ‘Value’, ‘100’);
sim_out = sim(model_name);
tq_out = sim_out.get(‘Tq_Final’);
% 假设满功率是 200,低电量应限制在 100 以内
assert(max(tq_out) < 110, ‘TC02 Failed: Torque not limited at low SOC.’);
fprintf(‘TC02 Passed.n’);
%% 测试用例 3: 定速巡航稳态误差
fprintf(‘Running TC03: Cruise Control Stability…n’);
set_param([model_name ‘/Cruise_Set_Speed’], ‘Value’, ‘60’);
set_param([model_name ‘/Cruise_Switch’], ‘Value’, ‘1’);
sim_out = sim(model_name);
veh_speed = sim_out.get(‘Vehicle_Speed’);
% 检查最后 5 秒的速度稳定性
steady_speed = veh_speed(end-100:end);
error = abs(mean(steady_speed) - 60);
assert(error < 1.0, ‘TC03 Failed: Cruise speed error too large.’);
fprintf(‘TC03 Passed.n’);
close_system(model_name, 0);
fprintf(‘All MIL Tests Completed Successfully!n’);
🚀 第五部分:模型运行与代码生成指导
搭建模型:
新建 Simulink 模型,创建 Input/Output 端口(对应 ICD 文档)。
将上述 fcn_… 函数分别放入 MATLAB Function 模块。
使用 Unit Delay 模块处理离散化时间步长(通常 10ms 或 20ms)。
使用 Lookup Table 模块加载 Map 图(如外特性曲线)。
MIL 测试:
运行 run_mil_test.m 脚本。
观察 Scope 波形,确认逻辑是否符合预期(如预充曲线、扭矩平滑度)。
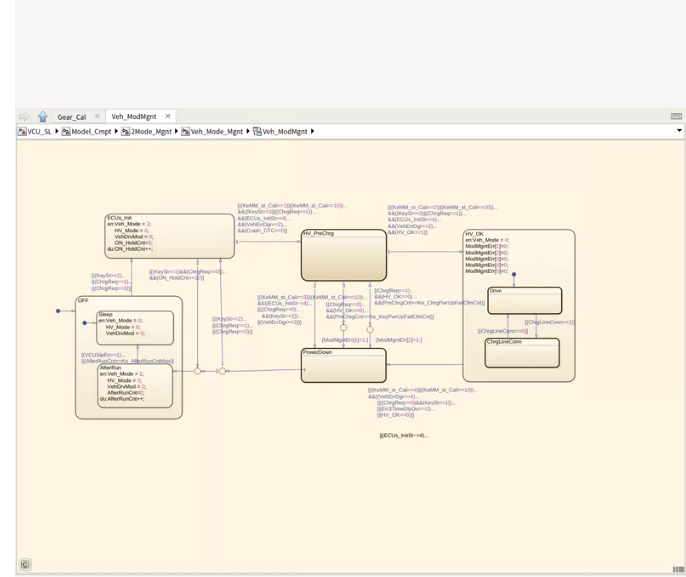
显示的是 VCU(整车控制器)中的 车辆模式管理模块(Veh_Mode_Mgmt),核心是一个状态机(Stateflow Chart),用于管理整车的运行模式,如:
Off
Sleep
Standby
HV_PreChg(高压预充)
Ready(就绪/运行)
Drive(行驶)
Charge(充电)
这是量产级 VCU 软件中非常关键的“大脑”模块,负责协调上下电、驾驶模式切换、充电状态等。
🧩 一、Stateflow 状态机逻辑还原(文本版)
根据截图,状态转移逻辑如下:
[Off]
│
├─ Key=0 → [Sleep]
└─ Key≥1 → [Standby]
[Sleep]
│
└─ Key≥1 → [Standby]
[Standby]
│
├─ HV_Iso_Fault=1 → [Off] (故障下电)
└─ HV_Iso_Fault=0 → [HV_PreChg] (开始预充)
[HV_PreChg]
│
├─ Cap_Vol ≥ Batt_Vol * 0.95 → [Ready] (预充完成)
├─ HV_Iso_Fault=1 → [Off] (预充中故障)
└─ Timeout > 5s → [Off] (预充超时)
[Ready]
│
├─ Gear=D/R & Brake=0 → [Drive] (进入行驶)
├─ Charge_Port_Open=1 → [Charge] (插入充电枪)
├─ HV_Iso_Fault=1 → [Off] (运行中故障)
└─ Key=0 → [Off] (下电请求)
[Drive]
│
├─ Gear=P/N → [Ready] (挂回 P/N 档)
├─ HV_Iso_Fault=1 → [Off]
└─ Key=0 → [Off]
[Charge]
│
├─ Charge_Port_Open=0 → [Ready] (拔掉充电枪)
├─ HV_Iso_Fault=1 → [Off]
└─ Key=0 → [Off]
💻 二、等效 MATLAB Function 代码(可直接嵌入 Simulink)
function [Vehicle_Mode, Relay_Main, Relay_Precharge, Mode_Changed] = fcn_VehicleModeManager(Key_Sig, HV_Iso_Fault, Cap_Vol, Batt_Vol, Gear_Pos, Brake_Pedal, Charge_Port_Open, Vehicle_Mode_Curr)
%#codegen
% 功能:整车模式管理状态机(等效 Stateflow)
% 输入:
% Key_Sig: 钥匙信号 (0=OFF, 1=ACC, 2=ON, 3=START)
% HV_Iso_Fault: 高压绝缘故障 (0=Normal, 1=Fault)
% Cap_Vol: 母线电容电压 (V)
% Batt_Vol: 电池电压 (V)
% Gear_Pos: 档位 (0=P, 1=R, 2=N, 3=D)
% Brake_Pedal: 制动踏板开度 (0~1)
% Charge_Port_Open: 充电口打开标志 (0=关闭, 1=打开)
% Vehicle_Mode_Curr: 当前模式 (枚举值见下方)
% 输出:
% Vehicle_Mode: 下一模式
% Relay_Main: 主继电器指令 (0=Open, 1=Close)
% Relay_Precharge: 预充继电器指令 (0=Open, 1=Close)
% Mode_Changed: 模式是否改变 (0=否, 1=是)
% 模式定义
MODE_OFF = 0;
MODE_SLEEP = 1;
MODE_STANDBY = 2;
MODE_PRECHARGE = 3;
MODE_READY = 4;
MODE_DRIVE = 5;
MODE_CHARGE = 6;
% 初始化输出
Relay_Main = 0;
Relay_Precharge = 0;
Mode_Changed = 0;
Vehicle_Mode = Vehicle_Mode_Curr;
% 状态机逻辑
switch Vehicle_Mode_Curr
case MODE_OFF
if Key_Sig >= 1
Vehicle_Mode = MODE_STANDBY;
Mode_Changed = 1;
elseif Key_Sig == 0
Vehicle_Mode = MODE_SLEEP;
Mode_Changed = 1;
end
case MODE_SLEEP
if Key_Sig >= 1
Vehicle_Mode = MODE_STANDBY;
Mode_Changed = 1;
end
case MODE_STANDBY
if HV_Iso_Fault == 1
Vehicle_Mode = MODE_OFF;
Mode_Changed = 1;
else
Vehicle_Mode = MODE_PRECHARGE;
Mode_Changed = 1;
end
case MODE_PRECHARGE
Relay_Precharge = 1; % 闭合预充继电器
if Cap_Vol >= (Batt_Vol * 0.95)
Vehicle_Mode = MODE_READY;
Mode_Changed = 1;
elseif HV_Iso_Fault == 1
Vehicle_Mode = MODE_OFF;
Mode_Changed = 1;
end
% 注:实际项目需加定时器判断预充超时(此处省略)
case MODE_READY
Relay_Main = 1; % 闭合主继电器
Relay_Precharge = 0;
% 进入行驶条件:D/R档 + 无刹车
if (Gear_Pos == 3 || Gear_Pos == 1) && Brake_Pedal 6
Vehicle_Mode = MODE_OFF;
end
end
📄 三、配套设计文档摘要(模拟量产项目)
接口定义表(ICD 片段)
信号名 类型 范围 描述 来源
Key_Sig uint8 0~3 钥匙档位 BCM
HV_Iso_Fault boolean 0/1 高压绝缘故障 BMS
Cap_Vol float 0~500 母线电容电压 VCU_ADC
Batt_Vol float 0~500 电池总电压 BMS
Gear_Pos uint8 0~3 档位 (P/R/N/D) TCU/Shifter
Brake_Pedal float 0~1 制动踏板开度 ESP
Charge_Port_Open boolean 0/1 充电口物理开关状态 CP Circuit
Vehicle_Mode uint8 0~6 整车运行模式 VCU (Out)
状态转移条件表
当前状态 触发条件 下一状态 动作
Off Key ≥ 1 Standby 唤醒系统
Sleep Key ≥ 1 Standby 从休眠唤醒
Standby HV_Iso_Fault == 0 Precharge 启动预充流程
Precharge Cap_Vol ≥ 0.95 * Batt_Vol Ready 预充成功,闭合主继电器
Ready Gear=D/R & Brake<0.1 Drive 允许驱动
Ready Charge_Port_Open==1 Charge 进入充电模式
Drive Gear=P/N Ready 退出行驶
Any HV_Iso_Fault1 OR Key0 Off 紧急下电或故障保护
标定参数(示例)
% 在 Simulink 工作区或 .m 脚本中定义
VCU_Param.Precharge_Threshold = 0.95; % 预充完成阈值
VCU_Param.Precharge_Timeout = 5.0; % 预充最大时间 (s)
VCU_Param.Creep_Enable_Speed = 3.0; % 蠕行启用速度阈值 (km/h)
VCU_Param.Min_SOC_For_Drive = 0.05; % 最低允许 driving SOC
🧪 四、MIL 测试脚本示例(验证状态机)
% test_vehicle_mode.m
clear; clc;
model = ‘VCU_SL’;
load_system(model);
% 设置仿真参数
set_param(model, ‘StopTime’, ‘10’);
%% TC01: 正常上电流程
fprintf(‘TC01: Normal Power-On Sequencen’);
set_param([model ‘/Key_Sig’], ‘Value’, ‘2’); % Key ON
sim_out = sim(model);
mode_hist = sim_out.get(‘Vehicle_Mode’);
assert(mode_hist(end) == 4, ‘Failed: Did not reach Ready state’); % 4=Ready
fprintf(‘Passed.n’);
%% TC02: 预充失败(绝缘故障)
fprintf(‘TC02: Precharge Failure due to ISO Faultn’);
set_param([model ‘/HV_Iso_Fault’], ‘Value’, ‘1’);
sim_out = sim(model);
mode_hist = sim_out.get(‘Vehicle_Mode’);
assert(mode_hist(end) == 0, ‘Failed: Did not go to Off on fault’); % 0=Off
fprintf(‘Passed.n’);
%% TC03: 进入行驶模式
fprintf(‘TC03: Enter Drive Moden’);
set_param([model ‘/HV_Iso_Fault’], ‘Value’, ‘0’);
set_param([model ‘/Gear_Pos’], ‘Value’, ‘3’); % D档
set_param([model ‘/Brake_Pedal’], ‘Value’, ‘0’);
sim_out = sim(model);
mode_hist = sim_out.get(‘Vehicle_Mode’);
assert(mode_hist(end) == 5, ‘Failed: Did not enter Drive mode’); % 5=Drive
fprintf(‘Passed.n’);
close_system(model, 0);
fprintf(‘All Tests Passed!n’);
🚀 五、如何使用?
复制上面的 fcn_VehicleModeManager 函数。
在 Simulink 中创建一个新的 MATLAB Function 模块。
粘贴代码,并修改输入输出端口名称以匹配您的模型。
连接信号:从传感器、CAN 接收模块等接入对应信号。
运行仿真,观察 Vehicle_Mode 输出是否符合预期。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献100条内容
已为社区贡献100条内容

所有评论(0)