深入探索CANopen协议:STM32主从源码实现与入门提高,绝对满足您各种程序需求
canopen协议stm32主站从站源码 入门提高 各种程序应有尽有
一、项目概述
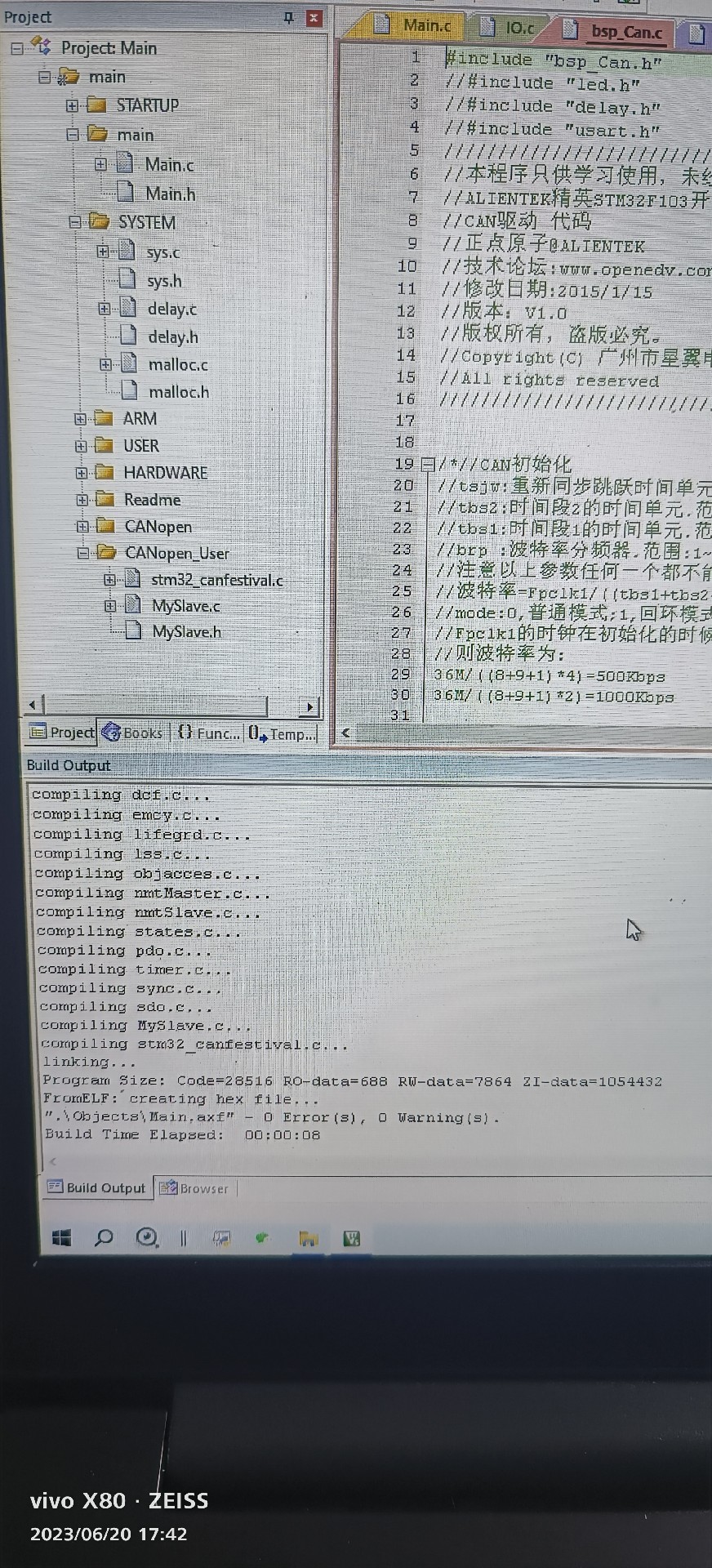
本次分析的代码是基于 CanFestival 开源库的 CANopen 协议栈移植成果,目标硬件平台为 STM32 系列微控制器。该移植代码实现了 CANopen 从站(Slave)的核心功能,涵盖对象字典管理、PDO/SDO 通信、心跳机制、同步机制等关键模块,可直接用于工业自动化领域中基于 CAN 总线的设备间数据交互场景,支持标准化的 CANopen 协议通信流程,具备良好的可扩展性与兼容性。
二、核心模块功能解析
(一)对象字典管理模块
对象字典是 CANopen 协议的核心数据结构,用于存储设备的所有配置信息、通信参数及应用数据,本移植代码通过结构化设计实现了完整的对象字典管理功能。
1. 数据映射与定义
- 应用数据定义:代码中定义了多类型的应用数据变量(如 UNS8 类型的 Data1、Data2 系列,INTEGER16 类型的 Data4 数组,INTEGER32 类型的 Data6 系列等),并将其与对象字典的特定索引(Index)和子索引(Subindex)绑定。例如,Data1 映射至索引 0x2000 子索引 0x00,Data4 数组映射至索引 0x2003 子索引 0x01 - 0x02,确保应用数据可通过 CANopen 协议进行访问。
- 数据类型与访问权限:每个对象字典条目明确指定数据类型(如 uint8、int16、uint32 等)和访问权限(读/写 RW、只读 RO、只写 WO)。例如,设备类型(索引 0x1000)设为只读,确保设备类型信息不可被随意修改;而生产者心跳时间(索引 0x1017)设为读/写,支持用户根据实际需求调整心跳周期。
2. 索引结构设计
- 标准索引实现:涵盖 CANopen 协议规定的标准索引,包括设备类型(0x1000)、错误寄存器(0x1001)、预定义错误字段(0x1003)、SYNC COB - ID(0x1005)、心跳相关参数(0x1016 - 0x1017)、设备标识(0x1018)、SDO 服务器参数(0x1200)、PDO 通信与映射参数(0x1400 - 0x1403、0x1600 - 0x1603、0x1800 - 0x1803、0x1A00 - 0x1A03)等,满足协议合规性要求。
- 自定义索引扩展:新增索引 0x2000 - 0x2005 用于存储应用层自定义数据,支持用户根据具体业务需求扩展数据类型与数量,为个性化功能开发提供灵活接口。
3. 数据合法性校验
- 值范围检测函数:通过
MySlavevalueRangeTest函数实现对特定数据的范围校验。例如,针对索引 0x1003 子索引 0x00(预定义错误字段),限制其值只能为 0;针对自定义数据类型valueRange1(INTEGER8 类型),限制其值必须在 0 - 10 之间,若超出范围则返回对应的错误码(如 ODVALUETOOLOW、ODVALUETOOHIGH),保障数据有效性。
(二)通信对象模块
通信对象是 CANopen 协议实现数据交互的核心载体,本移植代码完整实现了 PDO(Process Data Object,过程数据对象)和 SDO(Service Data Object,服务数据对象)的通信功能,同时支持心跳(Heartbeat)和同步(SYNC)机制。
1. PDO 通信功能
- PDO 分类与配置:支持 4 路接收 PDO(RPDO,索引 0x1400 - 0x1403)和 4 路发送 PDO(TPDO,索引 0x1800 - 0x1803),每路 PDO 均包含通信参数(如 COB - ID、传输类型、抑制时间、事件定时器等)和映射参数(如映射的对象字典索引/子索引、数据长度等)配置。
- COB - ID 配置:例如,RPDO1 的 COB - ID 设为 0x200,TPDO1 的 COB - ID 设为 0x180,确保不同 PDO 在 CAN 总线上的标识唯一,避免数据冲突。
- 传输类型配置:支持多种传输类型,如 TPDO1 传输类型设为 0xA(每 10 个 SYNC 信号传输一次),TPDO2 - TPDO4 传输类型设为 0xFE(事件触发传输),并可通过事件定时器(如 TPDO2 事件定时器设为 500ms)控制数据发送频率,适配不同实时性需求的场景。
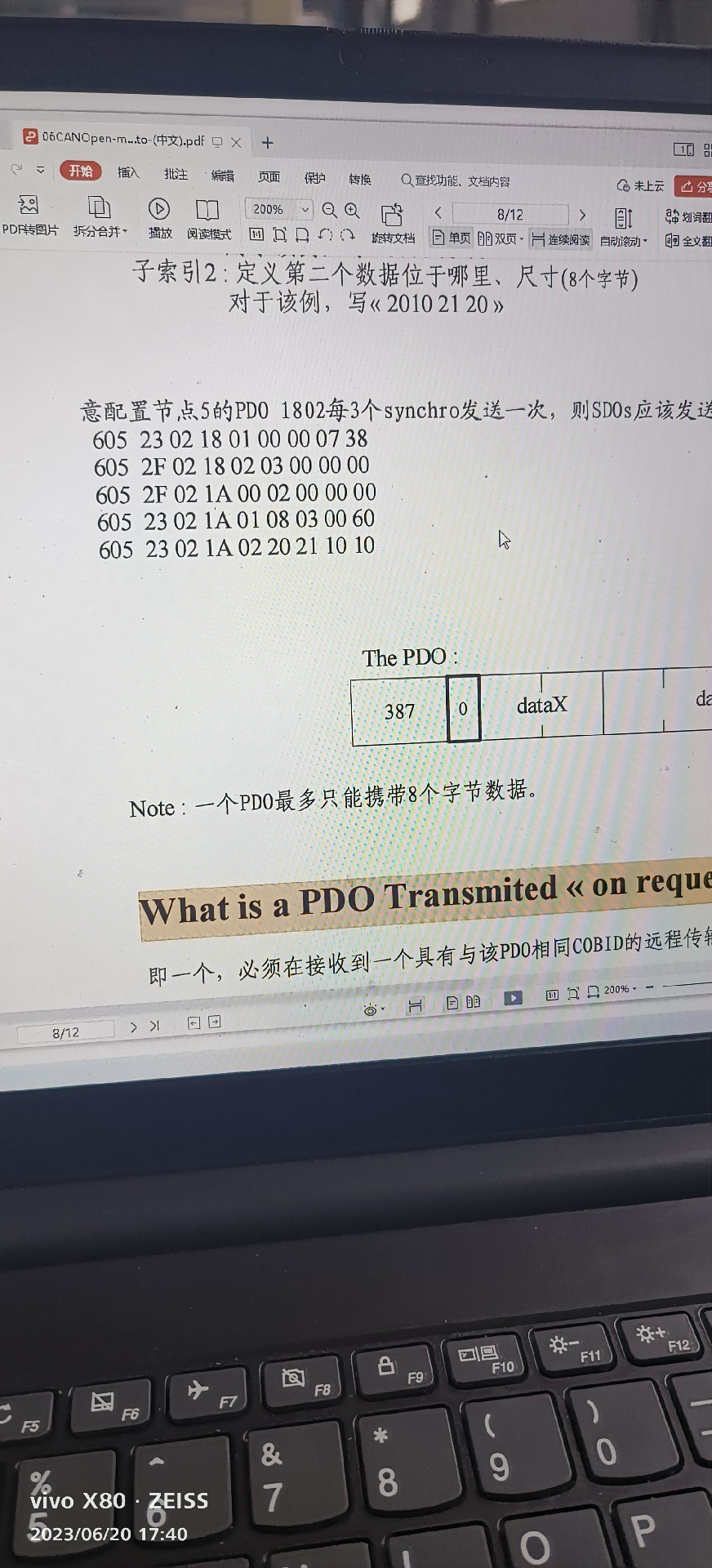
- PDO 数据映射:通过映射参数(索引 0x1600 - 0x1603 为 RPDO 映射,0x1A00 - 0x1A03 为 TPDO 映射)将对象字典中的数据映射到 PDO 数据帧中。例如,TPDO1 映射索引 0x2000 子索引 0x00(Data1),TPDO2 映射索引 0x2001 子索引 0x01 - 0x02(Data2Data21、Data2Data22),实现应用数据的高效传输,且 PDO 传输无协议开销,满足实时性要求高的场景。
- PDO 数据处理:提供
buildPDO(构建 PDO 数据帧)、proceedPDO(处理接收的 PDO 数据帧)、sendPDOevent(触发 PDO 事件发送)等函数,实现 PDO 数据的打包、解析与发送控制,确保数据在 CAN 总线上的正确传输与处理。
2. SDO 通信功能
- SDO 服务器配置:实现 SDO 服务器功能(索引 0x1200),配置客户端到服务器(Client - to - Server)的 COB - ID 为 0x600,服务器到客户端(Server - to - Client)的 COB - ID 为 0x580,支持通过 SDO 协议对对象字典中的数据进行读写操作,适用于配置参数修改、非实时性数据交互等场景。
- SDO 数据传输:支持分段传输与 expedited(加急)传输两种模式,可根据数据长度自动选择传输方式。例如,短数据(≤4 字节)采用 expedited 传输,减少通信延迟;长数据(>4 字节)采用分段传输,通过 toggle 位确保数据传输的完整性,同时提供超时重传机制,保障数据传输可靠性。
- SDO 错误处理:定义多种 SDO 错误码(如 SDOABTTOGGLENOTALTERNED、SDOABTTIMEDOUT、SDOABTCSNOTVALID 等),当出现数据传输错误(如 toggle 位错误、超时、命令字无效)时,发送 SDO 中止帧通知对方,便于问题定位与排查。
3. 心跳与同步机制
- 心跳机制:
- 生产者心跳:从站作为心跳生产者,通过索引 0x1017 配置心跳周期(默认 1000ms),定期向总线发送心跳帧,通知总线内其他节点自身的运行状态;若其他节点(心跳消费者)在设定时间内未收到心跳帧,则判定该从站故障,触发相应的错误处理逻辑。
- 消费者心跳:支持配置心跳消费者参数(索引 0x1016),可监测总线上指定节点的心跳状态,当监测到节点故障时,及时更新节点状态表(NMTable),并调用
heartbeatError函数触发错误回调,保障系统稳定性。 - 同步机制:
- SYNC 接收与处理:从站可接收总线中的 SYNC 帧(COB - ID 由索引 0x1005 配置),当接收到 SYNC 帧时,触发同步 PDO 的传输(如 TPDO1 每 10 个 SYNC 帧传输一次),实现多个节点间的数据同步传输,适用于多轴运动控制、分布式传感器数据采集等需要高精度同步的场景。
- SYNC 定时器配置:支持通过索引 0x1006 配置 SYNC 周期,若从站作为 SYNC 生产者,可按照设定周期发送 SYNC 帧,协调总线内节点的同步行为。
(三)状态机与网络管理模块
CANopen 从站通过状态机实现节点状态的切换与管理,同时支持 NMT(Network Management,网络管理)协议,接收来自 NMT 主站的控制命令,实现节点的启动、停止、复位等操作。
1. 节点状态机
- 状态定义:包含初始化(Initialisation)、预操作(Pre_operational)、操作(Operational)、停止(Stopped)四种核心状态,符合 CANopen 协议规定的节点状态转换流程。
- 初始化状态:节点上电后进入初始化状态,完成硬件初始化、对象字典加载等操作,初始化完成后自动切换至预操作状态。
- 预操作状态:支持 SDO 通信(可修改对象字典配置),但不允许 PDO 通信;可接收 NMT 命令切换至操作状态或停止状态。
- 操作状态:支持 PDO、SDO、心跳、同步等所有通信功能,节点正常运行时的主要状态。
- 停止状态:仅响应 NMT 命令,不支持其他通信功能,用于节点故障处理或维护场景。
- 状态切换控制:通过
setState函数实现状态切换,切换过程中自动启用或禁用对应的通信功能(如进入操作状态时启用 PDO 通信,进入停止状态时禁用 PDO、SDO 通信等),确保状态与功能的一致性。
2. NMT 协议支持
- NMT 命令接收与处理:从站接收 NMT 主站发送的 NMT 命令帧(COB - ID 为 0x00),支持的命令包括启动节点(NMTStartNode)、停止节点(NMTStopNode)、进入预操作状态(NMTEnterPreOperational)、节点复位(NMTResetNode)、通信复位(NMTResetComunication)。
- 命令执行逻辑:例如,接收到“启动节点”命令时,若当前状态为预操作或停止状态,则切换至操作状态;接收到“节点复位”命令时,重置节点状态至初始化状态,重新完成初始化流程,恢复节点默认配置。
- Boot - Up 帧发送:从站完成初始化后,自动发送 Boot - Up 帧(COB - ID 为 0x700 + 节点 ID),通知 NMT 主站节点已完成初始化,可进入预操作状态,实现节点的即插即用。
(四)定时器与中断模块
定时器与中断是保障 CANopen 协议实时性的关键,本移植代码基于 STM32 的定时器(如 TIM3、TIM7)实现了高精度的时间管理,支持定时中断、定时器回调等功能,为 PDO 事件触发、心跳发送、SDO 超时检测等提供时间基准。
1. 定时器配置
- TIM7 定时器:用于 CANopen 协议栈的核心定时任务,如时间计数(
TimeCNT)、下一次定时触发时间记录(NextTime),定时中断服务函数TIM7_IRQHandler中调用timerForCan函数更新时间计数,并在达到设定时间时触发TimeDispatch函数,处理协议栈中的定时任务(如 PDO 事件定时器、心跳定时器、SDO 超时定时器等)。 - TIM3 定时器:预留用于用户自定义定时任务,可根据实际需求配置定时周期与中断回调函数,扩展定时功能。
2. 定时任务管理
- 定时任务注册与执行:通过
SetAlarm函数注册定时任务(如 PDO 事件定时、心跳定时、SDO 超时定时),指定任务的回调函数、触发时间与周期;TimeDispatch函数在定时中断中执行,遍历所有注册的定时任务,判断任务是否达到触发时间,若达到则调用对应的回调函数,实现定时任务的精准执行。 - 定时器资源管理:支持最大 8 个定时任务(
MAXNBTIMER = 8),通过DelAlarm函数删除不需要的定时任务,释放定时器资源,避免资源浪费;同时通过时间戳管理,确保定时任务的执行精度,满足 CANopen 协议对实时性的要求(如 SDO 超时时间默认 3000ms,心跳周期最小可配置为 1ms)。
三、移植与适配特性
(一)硬件平台适配
代码针对 STM32 微控制器进行了深度适配,主要体现在以下方面:
- CAN 控制器驱动:集成 STM32 的 CAN 控制器驱动接口,通过
canSend函数实现 CAN 报文的发送,支持标准帧与扩展帧,可配置 CAN 总线波特率(默认 125kbps,通过canChangeBaudRate函数支持波特率切换),适配不同的 CAN 总线通信需求。 - 定时器驱动:基于 STM32 的定时器外设(TIM3、TIM7)实现定时功能,定时器的初始化、中断配置、计数模式等均针对 STM32 的硬件特性进行优化,确保定时精度与稳定性,例如 TIM7 采用向上计数模式,定时中断优先级配置为高于普通任务,避免定时任务被抢占导致的延迟。
- GPIO 与外设预留:代码中预留了 GPIO 配置、其他外设(如 UART、SPI)的接口,便于用户根据实际硬件电路扩展功能(如通过 UART 输出调试信息、通过 SPI 连接外部传感器获取数据并映射到 PDO 传输)。
(二)可扩展性设计
- 模块化架构:代码采用模块化设计,将对象字典、PDO/SDO 通信、心跳/同步、定时器等功能拆分为独立的模块(如
MySlave.c负责从站核心功能,pdo.c负责 PDO 通信,sdo.c负责 SDO 通信,timer.c负责定时器管理),模块间通过统一的接口交互,降低模块间的耦合度,便于后续功能扩展与维护(如新增 PDO 通道、扩展对象字典索引等)。 - 配置参数化:核心配置参数(如节点 ID、CAN 波特率、心跳周期、PDO 传输类型等)均通过对象字典或宏定义(如
CANBAUDRATE、SDOTIMEOUT_MS)进行配置,用户无需修改核心代码,只需调整配置参数即可适配不同的应用场景,提高代码的复用性。 - 回调函数机制:代码中定义了多种回调函数(如
heartbeatError、nodeguardError、postemcy、postSlaveBootup等),用户可根据实际需求实现这些回调函数,定制化处理对应的事件(如心跳错误处理、从站 Boot - Up 后的初始化操作、紧急事件上报等),增强代码的灵活性。
四、典型应用场景
(一)工业自动化数据采集
在工业自动化场景中,可将本移植代码部署在 STM32 基于的传感器节点(如温度传感器、压力传感器节点),通过 PDO 实现传感器数据的实时上传:
- 传感器节点采集数据后,将数据更新到对象字典的自定义索引(如 0x2000 - 0x2005)中。
- 配置 TPDO1 映射自定义索引的数据,传输类型设为事件触发(0xFE),事件定时器设为 100ms,确保传感器数据每 100ms 上传一次。
- 总线中的主站(如 PLC、工业 PC)通过接收 TPDO 数据,实时获取传感器节点的采集数据,用于监控与控制。
(二)运动控制
在多轴运动控制场景中,主站通过 PDO 向从站(如伺服驱动器节点)发送控制指令,同时通过同步机制实现多轴同步运动:
- 主站配置 RPDO1 映射控制指令(如目标位置、速度指令),COB - ID 设为 0x201(对应从站节点 ID 为 1),传输类型设为每 1 个 SYNC 帧传输一次(0x01)。
- 从站配置 TPDO1 映射反馈数据(如实际位置、速度反馈),COB - ID 设为 0x181,传输类型设为每 1 个 SYNC 帧传输一次。
- 主站定期发送 SYNC 帧,触发从站接收 RPDO 控制指令并执行运动,同时发送 TPDO 反馈数据,实现主站对从站的实时控制与状态监控,保障多轴运动的同步性与精度。
(三)设备配置与维护
在设备配置与维护场景中,主站通过 SDO 对从站的参数进行配置与读取:
- 主站通过 SDO 读取从站的设备标识(索引 0x1018),获取设备的厂商 ID、产品代码、版本号等信息,实现设备的身份识别。
- 主站通过 SDO 修改从站的 PDO 传输参数(如 TPDO 的事件定时器周期)、心跳周期(索引 0x1017)等配置参数,无需重新烧录代码即可完成设备配置的更新,简化设备维护流程。
- 当从站出现故障时,主站通过 SDO 读取从站的错误寄存器(索引 0x1001)和预定义错误字段(索引 0x1003),获取故障信息,便于故障定位与排查。
五、总结与展望
本次移植的 CanFestival CANopen 代码基于 STM32 平台,完整实现了 CANopen 从站的核心功能,包括对象字典管理、PDO/SDO 通信、心跳与同步机制、状态机与网络管理等,具备良好的合规性、实时性、可扩展性与硬件适配性,可广泛应用于工业自动化、运动控制、设备监控等领域。
canopen协议stm32主站从站源码 入门提高 各种程序应有尽有
未来可从以下方面进一步优化与扩展:
- 功能扩展:增加 LSS(Layer Setting Services)协议支持,实现节点 ID 与 CAN 波特率的在线配置;增加 EMCY(Emergency)紧急事件处理功能,当设备出现严重故障时,及时向主站上报紧急事件,提高系统的故障容错能力。
- 性能优化:优化 PDO 数据处理流程,减少数据拷贝次数,进一步降低通信延迟;优化定时器管理算法,支持更多定时任务,提高定时精度,满足更高实时性要求的场景(如微秒级同步)。
- 工具链集成:集成 CANopen 配置工具(如 CANopen Editor),支持通过图形化界面配置对象字典、PDO/SDO 参数等,降低代码配置的复杂度,提高开发效率。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)