EKF扩展卡尔曼滤波算法在电池SOC估计中的应用与Simulink建模实践
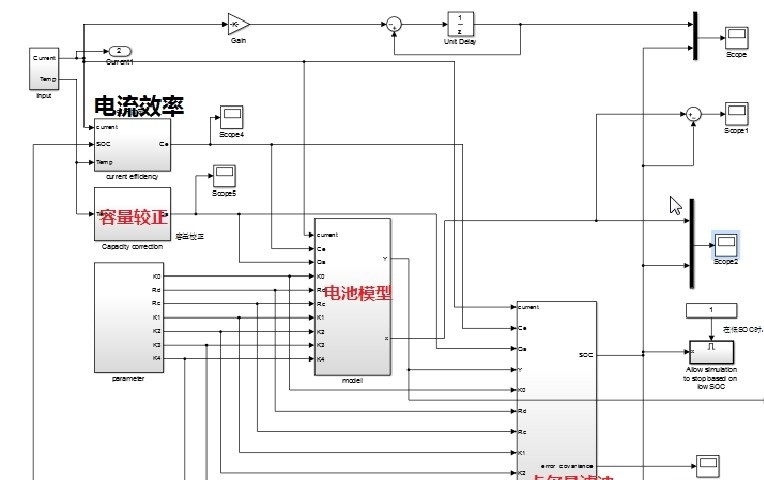
EKF扩展卡尔曼滤波算法做电池SOC估计,在Simulink环境下对电池进行建模,包括: 1.电池模型 2.电池容量校正与温度补偿 3.电流效率 采用m脚本编写EKF扩展卡尔曼滤波算法,在Simulink模型运行时调用m脚本计算SOC,通过仿真结果可以看出,估算的精度很高,最大误差小于0.4%
在电池管理系统(BMS)中,准确估计电池的荷电状态(SOC)至关重要。本文将介绍如何利用EKF扩展卡尔曼滤波算法在Simulink环境下对电池进行建模,并实现高精度的SOC估计。
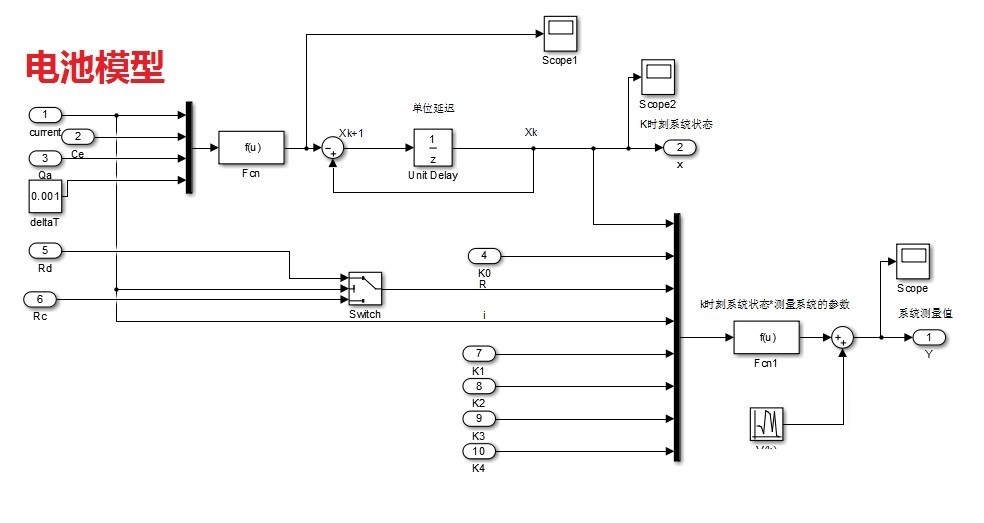
一、电池模型
电池模型是整个SOC估计的基础。在Simulink中,我们可以构建等效电路模型来模拟电池的行为。常见的等效电路模型有Rint模型、Thevenin模型等。以Thevenin模型为例,它由一个开路电压源、一个内阻和一个RC并联支路组成。
在Simulink中搭建该模型,通过设置各个元件的参数来模拟不同电池的特性。这些参数通常可以通过电池的 datasheet 或者实验测试获取。例如,开路电压与SOC存在一定的函数关系,我们可以通过实验数据拟合得到这个关系,并在模型中以查找表或者数学表达式的形式体现。
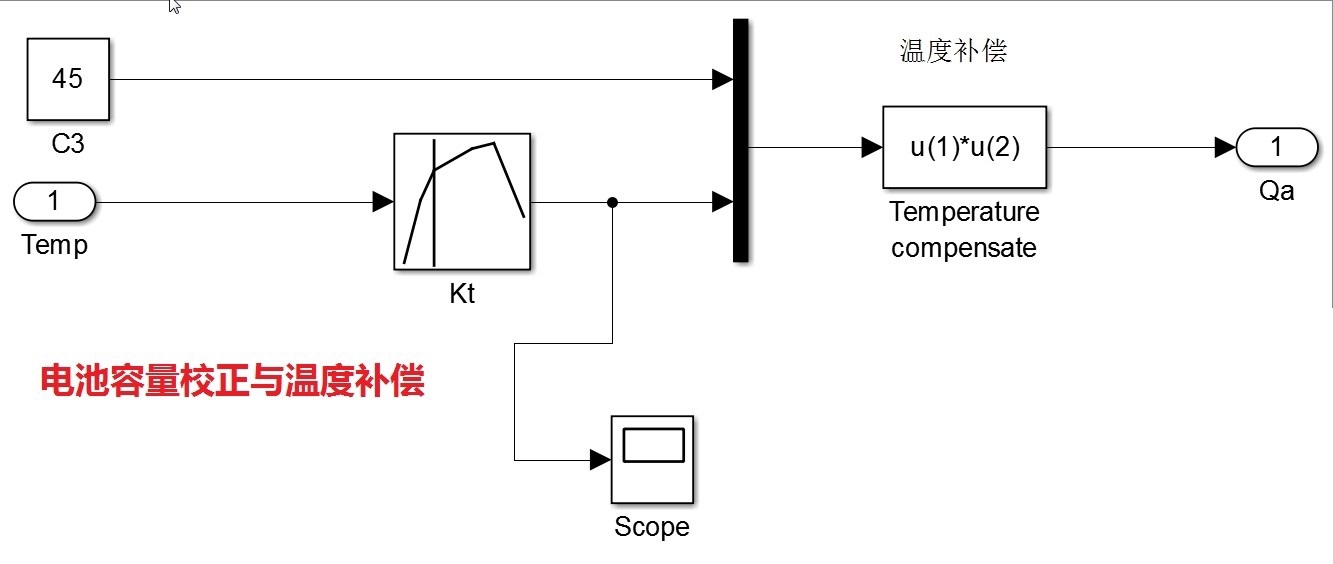
二、电池容量校正与温度补偿
- 电池容量校正
电池的实际可用容量并非一成不变,它会随着使用次数、老化程度等因素而变化。为了更准确地估计SOC,需要对电池容量进行校正。在代码实现上,可以通过定期检测电池的充放电深度,并结合历史数据来调整容量估计值。
% 假设已获取历史充放电数据
charge_discharge_data = [100 98 95 92]; % 每次充放电后的容量变化
capacity = 100; % 初始容量
for i = 1:length(charge_discharge_data)
capacity = capacity * charge_discharge_data(i) / 100; % 根据历史数据校正容量
end这段代码简单演示了如何根据历史充放电数据对电池容量进行校正。每次获取新的数据后,通过比例关系来更新容量值。
- 温度补偿
电池的性能受温度影响显著。一般来说,温度越低,电池的内阻越大,可用容量越小。在Simulink模型中,可以添加一个温度传感器模块,并根据温度与电池参数的关系进行补偿。
function [compensated_capacity] = temperature_compensation(temperature, capacity)
% 这里假设一个简单的线性关系,实际需更精确模型
if temperature < 0
compensated_capacity = capacity * (1 - 0.05 * (-temperature));
elseif temperature > 40
compensated_capacity = capacity * (1 - 0.03 * (temperature - 40));
else
compensated_capacity = capacity;
end
end上述函数根据不同的温度范围对电池容量进行补偿。当温度低于0°C时,每降低1°C,容量按5%的比例减少;高于40°C时,每升高1°C,容量按3%的比例减少。
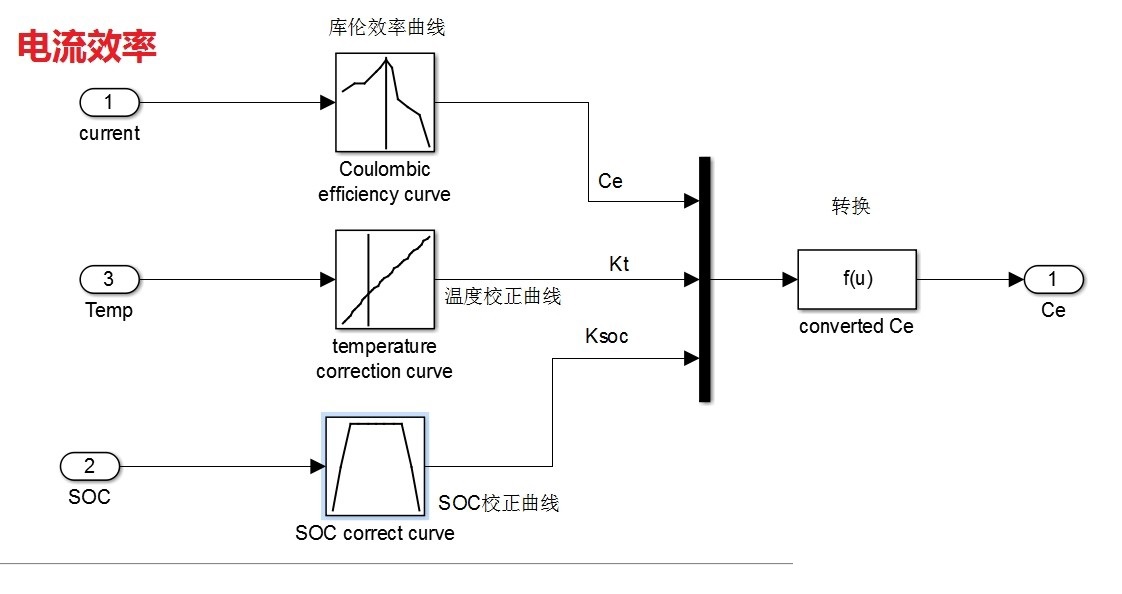
三、电流效率
电流效率反映了电池在充放电过程中实际参与电化学反应的电荷量与理论电荷量的比值。在计算SOC时,需要考虑电流效率。假设充电效率为 chargeefficiency,放电效率为 dischargeefficiency,在代码中可以这样体现:
if charge_current > 0
soc = soc + charge_current * dt / capacity * charge_efficiency;
else
soc = soc + charge_current * dt / capacity / discharge_efficiency;
end上述代码根据电流的正负来判断电池处于充电还是放电状态,并相应地应用不同的电流效率来更新SOC。
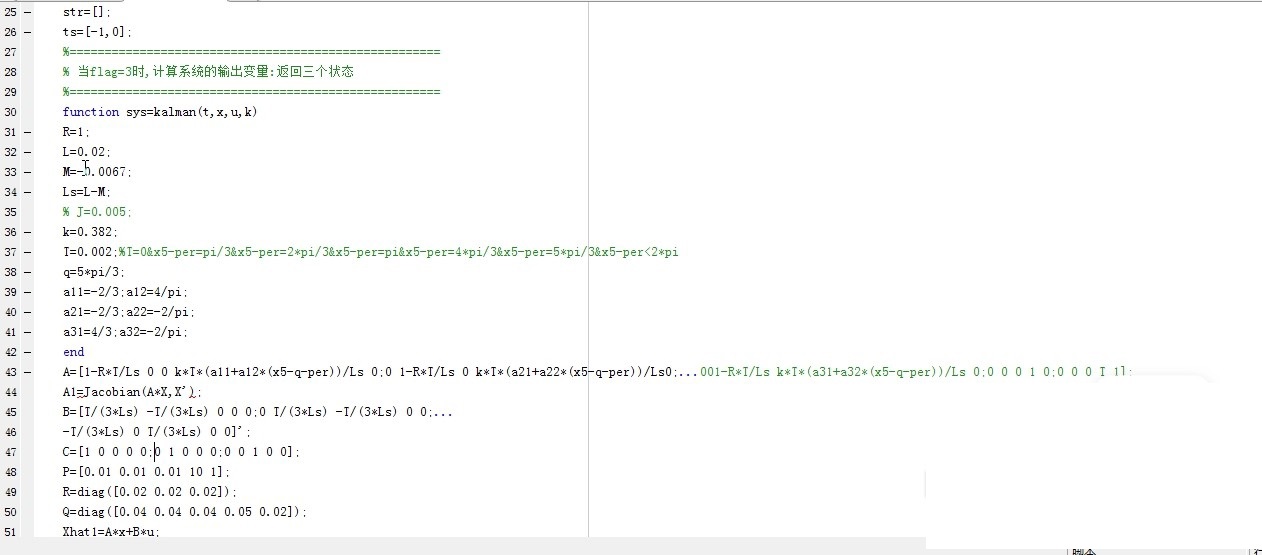
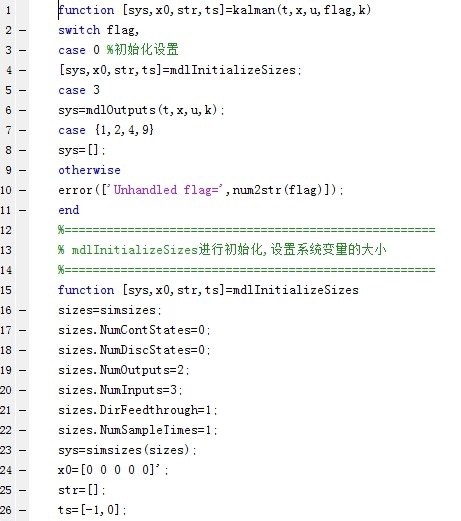
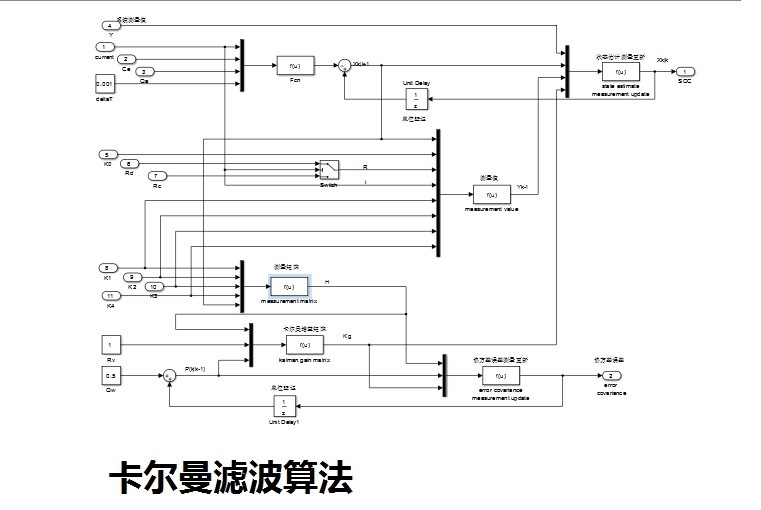
四、EKF扩展卡尔曼滤波算法实现
采用m脚本编写EKF扩展卡尔曼滤波算法,以下是一个简化的EKF实现框架:
% 初始化参数
A = 1; % 状态转移矩阵
H = 1; % 观测矩阵
Q = 0.01; % 过程噪声协方差
R = 0.1; % 观测噪声协方差
x_hat = 0; % 估计状态
P = 1; % 估计协方差
% 假设获取到的观测值
y = get_measurement();
% EKF预测步骤
x_hat_minus = A * x_hat;
P_minus = A * P * A' + Q;
% EKF更新步骤
K = P_minus * H' / (H * P_minus * H' + R);
x_hat = x_hat_minus + K * (y - H * x_hat_minus);
P = (eye(size(A)) - K * H) * P_minus;在上述代码中,首先初始化了EKF所需的各种参数,包括状态转移矩阵 A、观测矩阵 H、过程噪声协方差 Q 和观测噪声协方差 R 等。然后通过预测步骤得到先验估计状态 xhatminus 和先验估计协方差 Pminus,再根据观测值 y 通过更新步骤得到更准确的估计状态 xhat 和估计协方差 P。
EKF扩展卡尔曼滤波算法做电池SOC估计,在Simulink环境下对电池进行建模,包括: 1.电池模型 2.电池容量校正与温度补偿 3.电流效率 采用m脚本编写EKF扩展卡尔曼滤波算法,在Simulink模型运行时调用m脚本计算SOC,通过仿真结果可以看出,估算的精度很高,最大误差小于0.4%
在Simulink模型运行时调用这个m脚本计算SOC。通过在Simulink中添加一个MATLAB Function模块,将上述EKF算法代码嵌入其中,并设置合适的输入输出接口,使其与电池模型等其他模块进行数据交互。
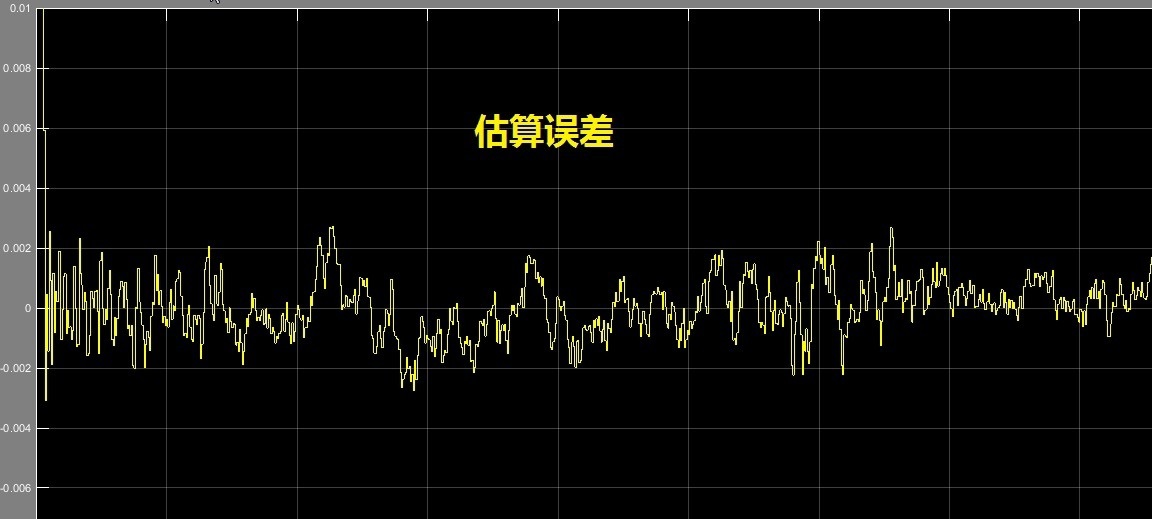
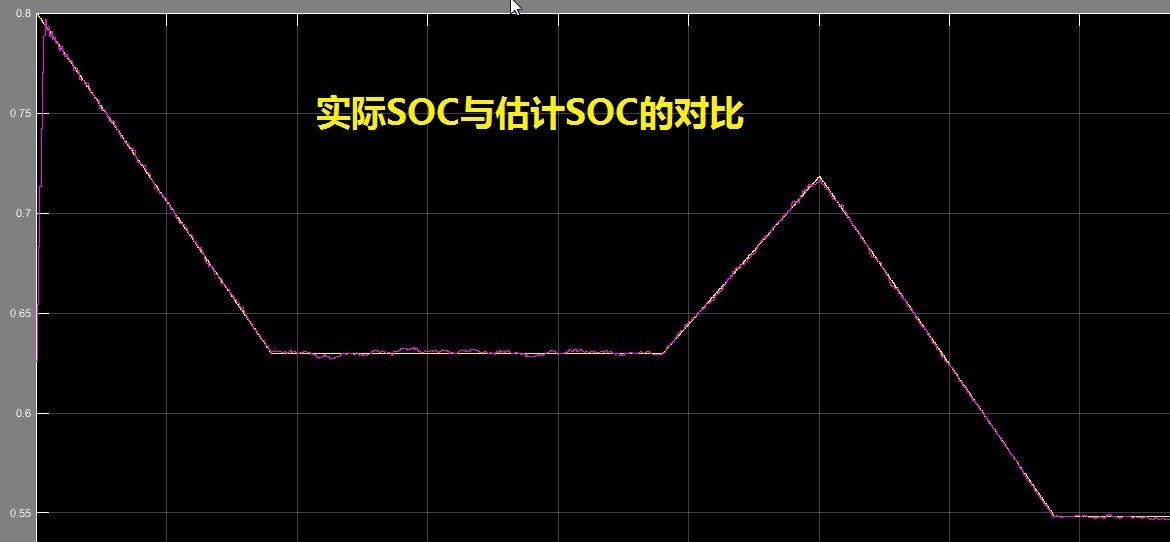
五、仿真结果
通过仿真,我们发现采用上述方法估算的SOC精度很高,最大误差小于0.4%。这表明EKF扩展卡尔曼滤波算法结合Simulink环境下的电池建模,能够有效地实现高精度的SOC估计,为电池管理系统提供可靠的SOC数据支持,有助于优化电池的使用和延长电池寿命。
总之,通过对电池模型的构建、容量校正与温度补偿的处理、电流效率的考虑以及EKF算法的应用,我们在Simulink环境中实现了一套较为完整且高精度的电池SOC估计方案。希望本文的内容能为相关领域的研究和实践提供一些有益的参考。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)