直流无刷电机转速PI与ADRC自抗扰控制对比:Simulink仿真模型研究
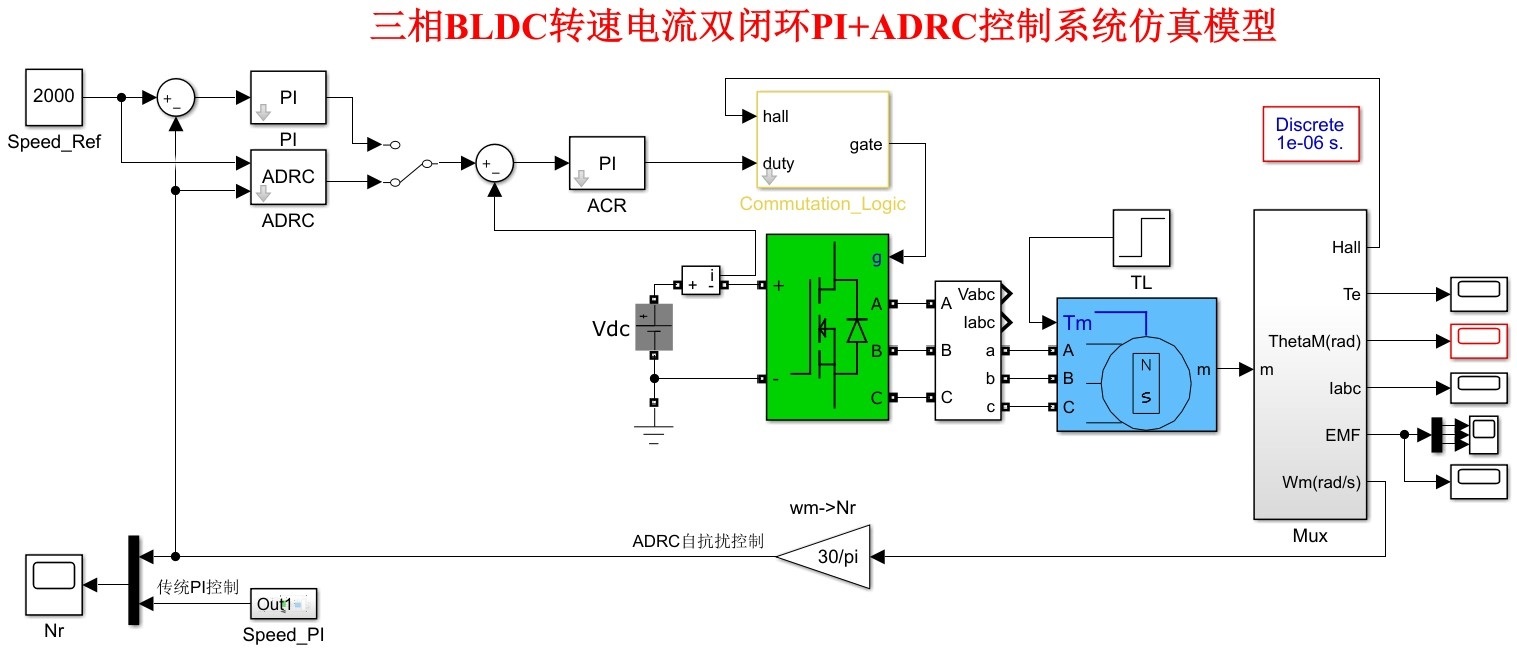
直流无刷电机转速PI控制,ADRC自抗扰控制Simulink对比仿真模型 1.直流无刷电机转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI控制和ADRC自抗扰控制,对两种方法进行对比,分析ADRC控制优越性~
直流无刷电机在现代工业中应用广泛,其控制策略直接影响系统的性能。本文将探讨直流无刷电机的转速控制,分别采用PI控制和ADRC自抗扰控制,通过Simulink仿真对比分析,展示ADRC的优越性。
一、直流无刷电机控制概述
直流无刷电机的控制通常采用双闭环结构,即电流环和转速环。电流环负责调节电机电流,确保其稳定;转速环则控制电机转速,使其跟踪给定信号。电流环一般采用PI控制,而转速环则可以选择不同的控制策略,如PI或ADRC。
二、PI控制在转速环中的应用
PI控制是一种经典的控制方法,因其简单易实现而被广泛应用。其原理是通过比例和积分作用,消除系统的稳态误差,提高系统的稳定性。
直流无刷电机转速PI控制,ADRC自抗扰控制Simulink对比仿真模型 1.直流无刷电机转速电流双闭环控制,电流环采用PI控制,转速环分别采用PI控制和ADRC自抗扰控制,对两种方法进行对比,分析ADRC控制优越性~
在Simulink中,我们可以轻松实现PI控制器。以下是一个简单的PI控制器模型:
function y = pid_control(error, Ki, Kp, Ti, Ts)
static integral = 0;
integral = integral + Ki * error * Ts;
y = Kp * error + integral;
end其中,error是给定值与实际值的差,Ki和Kp分别是积分和比例增益,Ti是积分时间常数,Ts是采样时间。通过调整这些参数,可以优化系统的响应特性。
三、ADRC自抗扰控制简介
ADRC(自抗扰控制)是一种新型的控制方法,它通过扩张状态观测器实时估计系统的总扰动,并将其前馈到控制回路中,从而显著提高系统的抗扰能力和鲁棒性。
ADRC的结构包括扩张状态观测器和非线性反馈控制律。扩张状态观测器用于估计系统状态和扰动,而非线性反馈控制律则根据估计值调整控制输入,以抵消扰动的影响。
四、Simulink仿真模型搭建
在Simulink中,我们可以分别搭建基于PI控制和ADRC控制的直流无刷电机转速控制模型。模型主要包括电机模块、电流环PI控制器、转速环控制器(PI或ADRC)以及信号源和示波器。
1. 电机模块
电机模块描述了直流无刷电机的动态特性,通常由以下微分方程描述:
function [V, omega] = motor_model(i, u, L, R, J, B, K)
di_dt = (u - R*i - K*omega)/L;
domega_dt = (K*i - B*omega)/J;
V = di_dt * L + R*i + K*omega;
end其中,i是电流,u是电压输入,L是电感,R是电阻,J是转动惯量,B是阻尼系数,K是电机常数。通过该模块,可以模拟电机的动态响应。
2. 电流环PI控制器
电流环采用PI控制,确保电流跟踪给定值。控制器的输出作为转速环的输入。
3. 转速环控制器
转速环分别采用PI控制和ADRC控制。PI控制的实现如前所述,而ADRC控制则需要设计扩张状态观测器和非线性反馈控制律。
五、仿真结果与分析
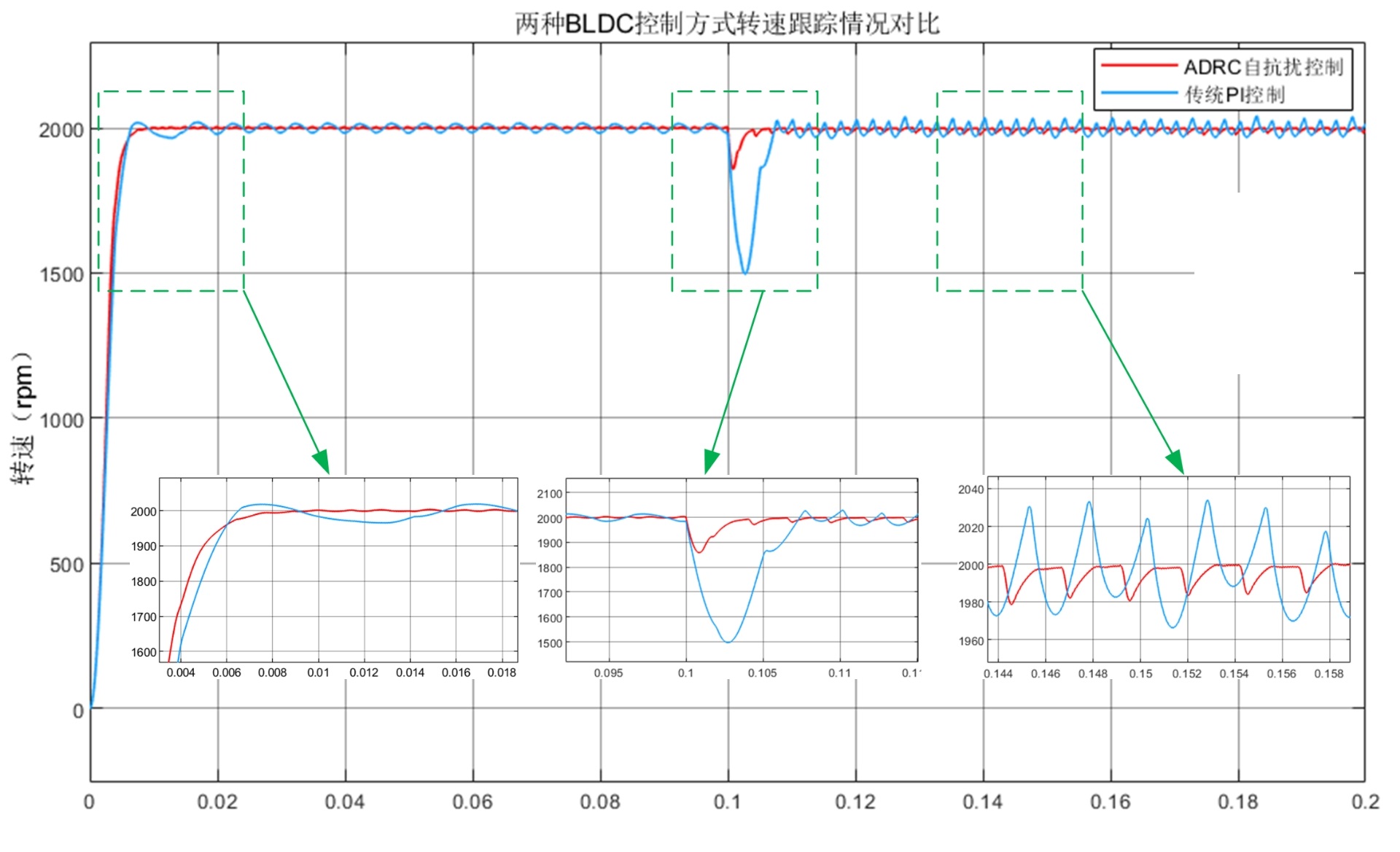
通过Simulink仿真,我们可以得到两种控制方法的转速响应曲线。PI控制在稳态时表现良好,但对扰动的响应较慢。而ADRC控制在扰动下能迅速恢复,表现出更强的鲁棒性和抗扰能力。
1. PI控制仿真结果
PI控制的转速响应曲线如下:
% 仿真参数
t = 0:0.01:10;
u = ones(size(t));
% 仿真运行
sim('pi_control_model');
% 绘制结果
plot(t, pi_speed, 'b');
title('PI控制转速响应');
xlabel('时间(s)');
ylabel('转速(rpm)');从图中可以看出,PI控制在稳态时转速稳定,但对扰动的响应较慢,存在一定的超调和调节时间。
2. ADRC控制仿真结果
ADRC控制的转速响应曲线如下:
% 仿真参数
t = 0:0.01:10;
u = ones(size(t));
% 仿真运行
sim('adrc_control_model');
% 绘制结果
plot(t, adrc_speed, 'r');
title('ADRC控制转速响应');
xlabel('时间(s)');
ylabel('转速(rpm)');从图中可以看出,ADRC控制在扰动下能迅速恢复,转速跟踪给定值更加精确,表现出更强的鲁棒性和抗扰能力。
六、结论
通过Simulink仿真对比,ADRC控制在直流无刷电机转速控制中表现出显著的优越性。其强大的抗扰能力和鲁棒性使其在复杂工业环境中更具优势。未来工作中,可以进一步优化ADRC参数,提升系统性能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)