搭建考虑侧向风的八自由度整车模型:Simulink 实现与探索
考虑侧向风的八自由度整车模型 simulink 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建8自由度整车模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: →工况: 阶跃工况 →工况: 侧向风(可自定义风速线型) →整车模块:8自由度整车模型 →包含模块:转向系统,整车系统,悬架系统(十四自由度才有),魔术轮胎pac2002,车轮系统,PI驾驶员模块等 →八自由度包含:整车纵向,横向,横摆,侧倾,四轮旋转自由度。 包含:simulink源码文件,详细建模说明文档,对应参考资料
在汽车动力学研究领域,搭建精确的整车模型对于分析车辆在各种工况下的性能至关重要。今天咱们就来聊聊基于 Matlab/Simulink 搭建的考虑侧向风的八自由度整车模型,这个模型采用模块化建模方法,适用于多种工况场景,绝对是汽车研究中的得力工具。
一、模型的适用场景与架构
这个八自由度整车模型作为整车平台,就像一个强大的舞台,多种工况场景都能在上面“表演”。它由多个关键模块构成,如同搭建乐高一样,每个模块各司其职又紧密相连。
(一)工况模块
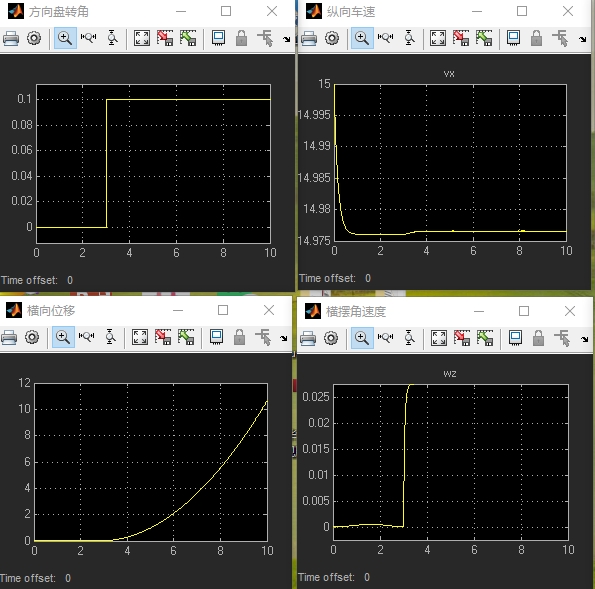
- 阶跃工况:阶跃工况模块就像是给车辆一个突然的指令冲击。想象一下,车辆在平稳行驶时,突然接到一个瞬间改变行驶状态的命令,这就是阶跃工况模拟的场景。在 Simulink 中,我们可以通过简单的设置来定义阶跃的起始时间、幅值等参数。比如,我们希望车辆在 2 秒时突然改变速度,就可以这样设置(以下代码为示意,非完整可运行代码):
% 定义阶跃时间
step_time = 2;
% 定义阶跃幅值
step_magnitude = 5;
% 在 Simulink 中通过 Step 模块设置相应参数实现阶跃工况这个模块对于研究车辆的瞬态响应特性非常有帮助,能让我们清晰看到车辆如何应对突然的行驶状态改变。
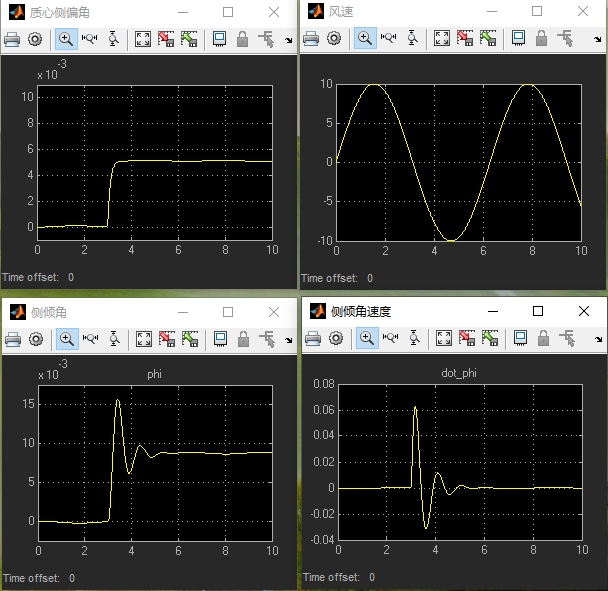
- 侧向风工况(可自定义风速线型):侧向风在实际驾驶中可是个不可忽视的因素,它会影响车辆的行驶稳定性。在这个模型里,我们可以随心所欲地定义风速线型。比如说,想要模拟一阵逐渐增强的侧向风,可以通过编写代码来控制风速随时间的变化。假设我们用线性递增的风速,代码如下:
% 定义时间向量
t = 0:0.01:10;
% 定义线性递增风速,起始风速为0,10秒时风速达到10m/s
wind_speed = 0.1 * t;
% 在 Simulink 中利用 Signal Builder 等模块导入这个风速数据,实现自定义风速线型的侧向风工况模拟这样,我们就能研究不同风速变化情况下车辆的响应,为车辆的抗侧风设计提供数据支持。
(二)整车模块
- 八自由度整车模型:这可是整个模型的核心。八自由度分别包括整车纵向、横向、横摆、侧倾以及四轮旋转自由度。纵向自由度决定了车辆的前后移动,横向自由度关乎车辆的左右偏移,横摆自由度影响车辆的转向摆动,侧倾自由度体现车辆在转弯等情况下的倾斜状态,而四轮旋转自由度则反映了每个车轮的转动情况。这些自由度相互作用,共同描绘出车辆复杂的运动状态。
- 包含模块
- 转向系统:转向系统如同车辆的“方向盘”,负责控制车辆的行驶方向。在 Simulink 中,我们可以基于动力学原理建立转向系统模型,通过输入驾驶员的转向指令,输出车轮的转向角度。例如,简单的转向系统传递函数模型可以这样写(仅为示意):
% 定义转向系统传递函数参数
num = [1];
den = [0.1 1];
steering_sys = tf(num, den);
% 将这个传递函数模型嵌入到 Simulink 的 Subsystem 中代表转向系统- 整车系统:整车系统整合了各个子系统的信息,协调车辆的整体运行。它接收来自转向系统、悬架系统(如果是十四自由度模型)、车轮系统等的输入,根据动力学方程计算车辆的整体运动状态。
- 悬架系统(十四自由度才有):虽然我们这里主要是八自由度模型,但悬架系统在更复杂的十四自由度模型中起着关键作用。它连接着车身和车轮,缓冲路面不平带来的冲击,维持车轮与地面的良好接触。在 Simulink 中建模悬架系统时,需要考虑弹簧、阻尼等元件的力学特性。
- 魔术轮胎 pac2002:轮胎模型对于整车模型的准确性至关重要。魔术轮胎 pac2002 模型能够精确模拟轮胎在不同工况下的力学特性,如纵向力、侧向力、回正力矩等。在 Simulink 中,我们可以通过调用相关的轮胎模型库,并根据实际车辆参数进行设置,来实现准确的轮胎模拟。
- 车轮系统:车轮系统负责将动力传递到地面,并承受车辆的重量和各种力。在模型中,车轮的转动惯量、滚动阻力等参数都需要精确设置,以保证模型的准确性。
- PI 驾驶员模块:PI 驾驶员模块模拟了驾驶员的操作行为。它根据车辆当前的状态(如速度、位置等)和目标状态(如期望速度、期望路径等),通过比例 - 积分(PI)控制算法计算出合适的控制指令,如油门、刹车和转向指令等。以下是简单的 PI 控制代码示例(仅为示意):
% 定义比例系数 Kp 和积分系数 Ki
Kp = 0.5;
Ki = 0.1;
% 初始化误差和积分项
error = 0;
integral = 0;
% 假设当前速度 current_speed 和目标速度 target_speed
current_speed = 20;
target_speed = 30;
for i = 1:100
error = target_speed - current_speed;
integral = integral + error;
control_signal = Kp * error + Ki * integral;
% 根据 control_signal 调整车辆的动力输出等操作,这里未详细展开车辆动力学模型
end二、模型资源
这个产品不仅有 Simulink 源码文件,让我们能够深入研究模型的底层实现,还有详细的建模说明文档。文档就像是一本使用指南,从模型的整体架构到每个模块的详细原理,都有清晰的阐述,方便我们理解和修改模型。同时,还配备了对应参考资料,这些资料为我们进一步探索相关理论知识提供了丰富的素材,无论是汽车动力学原理,还是 Simulink 建模技巧,都能从中找到有用的信息。
考虑侧向风的八自由度整车模型 simulink 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建8自由度整车模型,作为整车平台适用于多种工况场景。 产品simulink源码包含如下模块: →工况: 阶跃工况 →工况: 侧向风(可自定义风速线型) →整车模块:8自由度整车模型 →包含模块:转向系统,整车系统,悬架系统(十四自由度才有),魔术轮胎pac2002,车轮系统,PI驾驶员模块等 →八自由度包含:整车纵向,横向,横摆,侧倾,四轮旋转自由度。 包含:simulink源码文件,详细建模说明文档,对应参考资料
总的来说,这个考虑侧向风的八自由度整车模型,借助 Matlab/Simulink 的强大功能,为汽车工程领域的研究提供了一个全面且灵活的平台,无论是研究车辆的稳定性控制,还是分析不同工况下的行驶性能,都能发挥巨大作用。希望各位对汽车动力学感兴趣的小伙伴们,可以深入研究这个模型,挖掘更多有趣的成果!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)