CVPR 2025 | 南京大学 MOTIP:多目标跟踪不再需要复杂匹配规则,简洁方法效果更优
论文信息
标题:Multiple Object Tracking as ID Prediction
作者:Ruopeng Gao, Ji Qi, Limin Wang†(通讯作者)
机构:南京大学(新型软件技术国家重点实验室)、中国移动(苏州)、上海 AI Lab
代码:https://github.com/MCG-NJU/MOTIP
导读:
多目标跟踪(MOT)的主流做法是"检测+关联":先检测出每一帧的目标,再用匈牙利算法、IoU 匹配等手工设计的启发式方法把前后帧的目标对应起来。这些方法能用,但每遇到一个新场景(遮挡严重、目标外观相似、运动轨迹不规律),就需要一轮新的调参和规则修改。
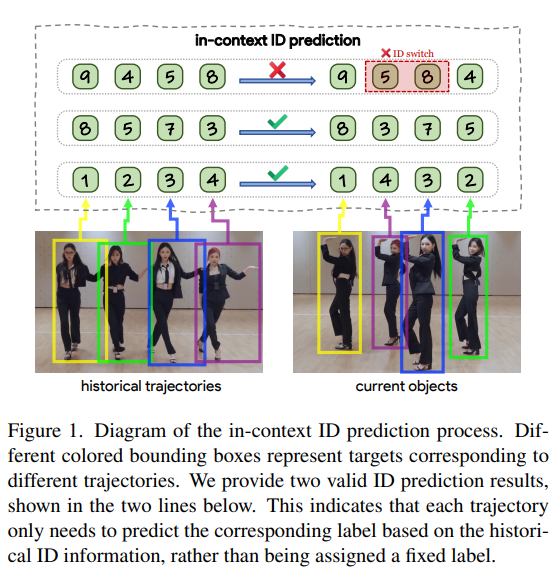
南京大学王利民团队提出了一个新视角:把目标关联问题转化为 ID 预测问题。给定一组历史轨迹(每条轨迹带有一个 ID 标签),直接预测当前帧检测到的目标应该分配哪个 ID。这个过程形式上类似分类,但本质不同:传统分类的标签有固定语义(猫=1、狗=2),而 MOT 中的 ID 标签是随机分配的,只表示"一致性"而不携带语义信息——同一条轨迹的 ID 保持一致即可,具体是哪个数字无所谓。这种"上下文相关"的标签设计使模型可以泛化到推理时未见过的新轨迹。
基于这个思路,MOTIP 用一个 DETR 检测器 + 可学习 ID 字典 + ID Decoder 的简洁架构,在 DanceTrack 上 HOTA 达到 69.6(不使用额外数据),超越此前最优 CO-MOT(65.3)+4.3 个百分点。在 SportsMOT 和 BFT(鸟类追踪)上同样达到 SOTA。
一、启发式匹配的困境:为什么需要换个思路?
主流 MOT 方法的关联步骤依赖手工设计的启发式规则:
| 方法类型 | 做法 | 局限 |
|---|---|---|
| IoU 匹配 |
用前后帧检测框的 IoU 计算相似度,匈牙利算法做最优匹配 |
目标快速移动或遮挡时 IoU 接近零,匹配失败 |
| 运动模型 |
用卡尔曼滤波预测目标下一帧位置,再做匹配 |
假设线性运动,非线性轨迹(如舞蹈、球类运动)效果差 |
| 外观特征 |
提取 ReID 特征计算余弦相似度 |
目标外观相似时(如穿同色队服的运动员)容易混淆 |
这些方法的共同问题是:每一种假设(线性运动、外观可区分、IoU 重叠充分)都有适用边界,一旦超出边界就需要针对性修补。比如 OC-SORT 为了处理突然停止和启动的运动专门设计了"虚拟轨迹",Hybrid-SORT 组合了多种相似度度量。每次改进都需要大量人工分析和参数调优。
论文提出的核心问题是:能否在保持"检测+关联"解耦的同时,把关联部分从启发式规则变成端到端可学习的?
MOTIP 的回答是:把关联转化为 ID 预测——给定上下文(历史轨迹 + 它们的 ID 标签),直接预测当前检测目标的 ID。
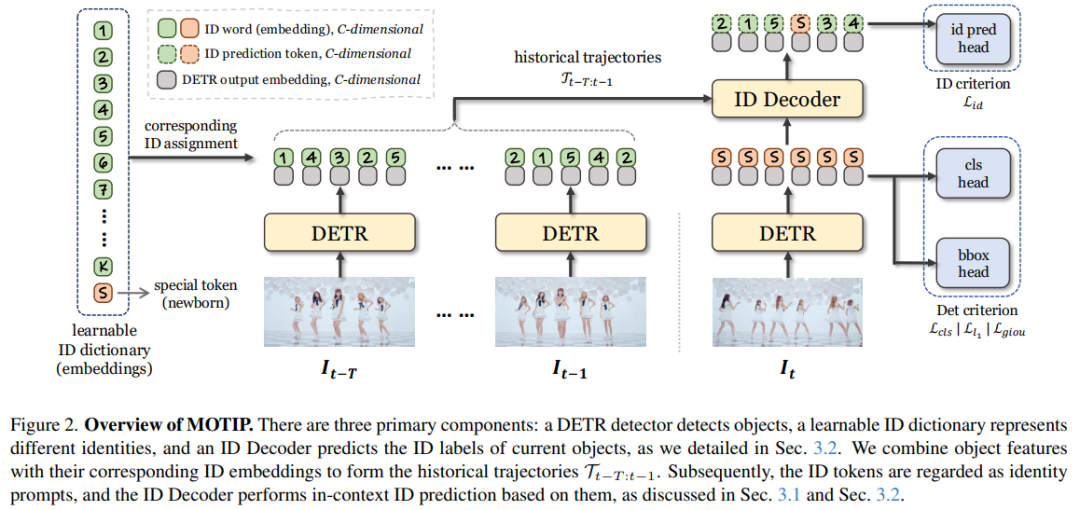
二、MOTIP 的三个组件:检测器 + ID 字典 + ID Decoder
_____________________________________________________________________________
组件 1:DETR 检测器
使用 Deformable DETR(ResNet-50 骨干)对每一帧做目标检测,输出每个目标的 C 维特征向量和检测框。
MOTIP 的一个关键设计是检测和关联解耦:检测器只负责检测,关联由后续的 ID Decoder 独立完成。这避免了 MOTR 等方法中检测 query 和跟踪 query 在同一个解码过程中产生冲突的问题。
组件 2:可学习 ID 字典
定义一个 ID 字典 I = {i₁, i₂, ..., iK, i_spec},其中:
-
K 个常规 ID token:每个是 C 维可学习向量,代表不同的身份
-
1 个特殊 token(i_spec):代表"新出现的目标"
关键理解:ID 标签不携带语义信息,它们只表示"一致性"。轨迹 1 和轨迹 2 的 ID 可以互换,只要同一条轨迹内的 ID 保持一致。这使得模型可以泛化到推理时未见过的新轨迹——不需要为每条新轨迹学习新的表示,只需复用已有的 ID token。
组件 3:ID Decoder
标准 Transformer Decoder,包含交替堆叠的 self-attention 和 cross-attention 层。注意力结构如下:
-
Query:当前帧的检测目标(特征与 i_spec 拼接,2C 维)
-
Key / Value:过去 T 帧(固定窗口)中所有历史轨迹的 token(特征与对应 ID embedding 拼接,2C 维)
其中 self-attention 层让当前帧的多个检测目标之间互相交换信息,避免多个相似目标被分配到同一个 ID。消融实验(Table 4)显示,在最终配置中去掉 self-attention 后 HOTA 从 62.2 降至 60.2;论文还指出,引入轨迹增强后,有无 self-attention 的性能差距进一步拉大,验证了这一设计的重要性。
ID Decoder 输出每个检测目标在 K+1 个 ID 上的概率分布,经线性分类头得到最终预测。推理时的 ID 分配并非简单取最高概率,而是包含一套完整的决策流程:
检测置信度低于 λ_det 的目标直接过滤
同一帧中如果多个目标预测了同一个 ID,只保留置信度最高的,其余标记为新目标
ID 预测概率需超过 λ_id 阈值才被接受,否则标记为新目标
新目标的检测置信度需超过 λ_new 才正式建立新轨迹
整个过程等价于:在历史轨迹提供的"上下文"中,为当前检测目标做 ID 预测——这就是"in-context ID prediction"的含义。
三、轨迹增强:训练时模拟推理时的错误
_____________________________________________________________________________
MOTIP 的一个巧妙设计是轨迹增强(Trajectory Augmentation),解决训练和推理之间的分布差异。
训练时使用 Ground Truth 构建历史轨迹,轨迹是"干净"的。但推理时,模型的 ID 分配可能出错(比如把目标 A 的 ID 分给了目标 B),导致历史轨迹中夹杂错误。如果训练时从未遇到过这种"脏数据",模型的鲁棒性就不够。
论文设计了两种增强策略:
| 策略 | 做法 | 模拟的场景 |
|---|---|---|
| 轨迹随机遮挡 |
以概率 λ_occ 随机丢弃轨迹中的 token |
目标被遮挡导致轨迹不完整 |
| 轨迹随机交换 |
以概率 λ_sw 随机交换同一帧中两条轨迹的 ID token |
模型给外观相似的目标分配了错误 ID |
两种增强的超参数都设为 0.5,在消融实验中证明对性能有显著贡献。
四、消融实验:ID 预测 vs ReID 匹配,差距有多大?
_____________________________________________________________________________
DanceTrack 主实验
DanceTrack 是当前最具挑战性的 MOT 基准之一,包含群舞场景中频繁交互、外观相似、非线性运动的目标。
| 方法 | HOTA | AssA | IDF1 | 额外数据 |
|---|---|---|---|---|
|
ByteTrack |
47.7 |
32.1 |
53.9 |
无 |
|
OC-SORT |
55.1 |
38.3 |
54.6 |
无 |
|
MeMOTR |
63.4 |
52.3 |
65.5 |
无 |
|
CO-MOT |
65.3 |
53.5 |
66.5 |
无 |
| MOTIP | 69.6 | 60.4 | 74.7 | 无 |
|
MOTRv2 |
69.9 |
59.0 |
71.7 |
有 |
| MOTIP | 72.0 | 63.5 | 76.8 | 有 |
不使用额外数据时,MOTIP 在 HOTA(+4.3)、AssA(+6.9)、IDF1(+8.2)上全面领先。AssA(关联准确率)的提升最大,直接验证了 ID 预测在目标关联上的优势。
使用额外数据后,MOTIP 达到 72.0 HOTA,超越 MOTRv2(69.9)和 CO-MOT(69.4)。
SportsMOT
体育赛事场景包含频繁的镜头切换、运动员的高速移动和反复交互。OC-SORT 通过显式建模非线性运动在该数据集上表现突出。
| 方法 | HOTA | AssA | IDF1 |
|---|---|---|---|
|
ByteTrack |
62.1 |
50.5 |
69.1 |
|
TrackFormer |
63.3 |
61.1 |
72.4 |
|
OC-SORT |
68.1 |
54.8 |
68.0 |
|
MeMOTR |
68.8 |
57.8 |
69.9 |
| MOTIP | 72.6 | 63.2 | 77.1 |
MOTIP 在不使用额外数据的情况下 HOTA 达到 72.6,比 MeMOTR(68.8)高 3.8,且在 AssA(+5.4)和 IDF1(+7.2)上优势更为明显。值得注意的是,MOTIP 不使用额外数据的成绩甚至超过了多数使用额外数据的方法(如 OC-SORT 71.9、DiffMOT 72.1)。
BFT(鸟类追踪)
鸟类追踪与行人追踪有显著不同:鸟类在三维空间中运动更动态,且外观高度相似(没有衣服等人工特征可用于区分),对关联算法提出了不同维度的挑战。
| 方法 | HOTA | AssA | IDF1 |
|---|---|---|---|
|
JDE |
30.7 |
23.4 |
37.4 |
|
FairMOT |
40.2 |
28.2 |
41.8 |
|
ByteTrack |
62.5 |
64.1 |
82.3 |
|
CenterTrack |
65.0 |
54.0 |
61.0 |
|
OC-SORT |
66.8 |
68.7 |
79.3 |
| MOTIP | 70.5 | 71.8 | 82.1 |
MOTIP 在这个全新的跟踪场景中同样达到 SOTA,验证了方法的跨场景泛化能力。
ID 预测 vs ReID 管线的直接对比
论文在完全相同的目标特征上做了直接对比实验,分别用 ReID 方法(FairMOT 的分类损失、对比学习损失)和 MOTIP 的 ID 预测做关联:
| 关联方式 | HOTA | AssA | IDF1 |
|---|---|---|---|
|
两阶段 ReID(FairMOT 式) |
29.4 |
11.5 |
22.1 |
|
两阶段对比学习 |
41.0 |
22.6 |
36.4 |
| 两阶段 ID 预测(MOTIP) | 55.4 | 41.1 | 55.7 |
|
一阶段 ReID + 匈牙利 |
50.6 |
34.7 |
50.9 |
| 一阶段 ID 预测(MOTIP) | 59.5 | 47.2 | 61.1 |
在相同特征下,ID 预测方式的 HOTA 比 ReID 高 8.9-26 个百分点(两阶段设置下差距更大)。这说明性能差距主要来自关联范式的不同,而非特征提取的差异。
五、总结与思考
论文贡献总结:
新范式:将多目标跟踪的关联问题重新定义为 in-context ID 预测,端到端可学习,不依赖启发式匹配
简洁架构:DETR + ID 字典 + Transformer Decoder,没有复杂的额外模块
跨场景验证:DanceTrack(HOTA 69.6/72.0)、SportsMOT(HOTA 72.6)和 BFT(鸟类追踪,HOTA 70.5)三个基准上均达到 SOTA
轨迹增强:随机遮挡 + 随机交换,有效弥合训练和推理之间的分布差异
MOTIP 最值得关注的不是具体的数字提升,而是它对 MOT 关联问题的重新定义。传统方法把关联看作"匹配问题"(在两组对象之间找最优对应),MOTIP 把它看作"预测问题"(给定上下文,预测 ID 标签)。这种视角转换带来了两个结构性优势:
端到端可学习:匹配规则不再需要手工设计,模型直接从数据中学习最优的关联策略
上下文感知:ID Decoder 通过 Transformer 的注意力机制看到所有历史轨迹和当前所有检测目标,可以利用全局信息做决策,而传统方法只做两两比较
训练效率也值得一提:8 张 4090,DanceTrack 训练不到一天。对于学术实验室来说门槛不高。
局限方面:
K 的上限:ID 字典大小 K 限制了同时可追踪的轨迹数量。论文通过回收已结束轨迹的 ID 来缓解(实验显示 token 利用率通常低于 40%),但在极端密集场景下仍可能成为瓶颈
架构刻意从简:论文作者明确指出,当前设计遵循"less is more"原则,优先验证 ID 预测范式的可行性。未来可以探索定制化的 ID Decoder 结构、引入运动/深度等额外跟踪线索、以及更精细的轨迹建模技术
总体来说,MOTIP 用一个简洁且符合直觉的思路重新定义了 MOT 的关联问题,在多个高难度基准上取得了一致的 SOTA 结果。作者自己也指出,"MOTIP 的简洁性和显著结果为后续研究留下了大量发展空间"——这正是好 baseline 的特征。
点赞/收藏/关注!!!是对我最大的激励!!!


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 17
17 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)