分布式模型预测控制(DMPC):从车队到航天器的智能协作
分布式模型预测控制matlab源程序包括: 1.多车队列控制算法,实现了三辆车的分布式模型预测控制(程序注解); 2.航天器交会的分布式模型预测控制; 3.基于分布式模型预测控制的多固定翼无人机的共识控制程序; 多智能体点对点转换的分布式模型预测控制;

在智能控制领域,分布式模型预测控制(DMPC)是一种非常强大的工具,它允许多个智能体在没有集中式控制器的情况下自主协作,完成复杂的任务。今天,我将通过几个有趣的案例,带大家了解一下DMPC在不同场景中的应用,同时也会分享一些代码片段,帮助大家更好地理解这些算法的实现细节。
一、多车队列控制:三辆车的“默契跟车”
第一个案例是一个多车队列控制的DMPC算法,主要目标是让三辆车在高速公路上实现自动跟车,保持车距和速度的一致性。这个场景听起来很像我们熟悉的自动驾驶车队,但实际上,它展示了DMPC在分布式协作中的基本思想。
算法思路:
- 预测模型:每辆车基于自身的动力学模型,预测未来一段时间内的运动轨迹。
- 优化目标:每个车不仅要保证自身的驾驶安全(如防止碰撞),还要与其他车协调,保持队形稳定。
- 通信机制:每辆车通过局部通信获取邻近车辆的状态信息,从而调整自身的控制输入。
代码片段:
% 初始化车辆模型参数
n = 3; % 三辆车
Ts = 0.1; % 采样时间
A = [1 Ts; 0 1]; % 状态空间矩阵
B = [0.5*Ts^2; Ts]; % 输入矩阵
% 每辆车的状态变量
x = zeros(2, n); % 初始位置和速度
u = zeros(1, n); % 初始控制输入
% DMPC参数
N = 10; % 预测 horizon
Q = diag([1, 0.1]); % 状态权重
R = 1; % 输入权重
% 执行DMPC循环
for k = 1:100
for i = 1:n
% 获取邻近车辆的状态
if i > 1
x_neighbor = x(:, i-1);
else
x_neighbor = [100; 0]; % 假设前车在初始位置
end
% 优化问题
x_pred = x(:, i);
u_pred = optiminput;
for j = 1:N
x_pred(:, j+1) = A * x_pred(:, j) + B * u_pred(:, j);
end
% 代价函数
cost = sum((x_pred(1, :) - x_neighbor(1)).^2 * Q(1)) + ...
sum((u_pred(:)).^2 * R);
% 求解优化问题(这里简化为PID控制)
u(:, i) = PID_control(x(:, i), x_neighbor);
end
% 更新状态
for i = 1:n
x(:, i) = A * x(:, i) + B * u(:, i);
end
end分析:
这个代码片段简化了DMPC的实现,通过预测模型和局部优化,每辆车都能根据邻居的状态调整自己的行为。可以看到,DMPC的核心在于每个智能体如何利用局部信息进行全局优化,而不需要一个中心控制器。
二、航天器交会:双航天器的“优雅靠近”
第二个案例是两个航天器的交会控制,目标是让两个航天器在太空中完成对接任务。这个场景比车队控制更为复杂,因为航天器的动力学模型是非线性的,且任务的安全性要求极高。
算法思路:
- 相对运动模型:使用相对运动方程描述两个航天器之间的相对位置和速度。
- 目标函数:最小化相对位置和速度的偏差,同时考虑燃料消耗。
- 约束条件:确保交会过程中不发生碰撞,且控制输入在合理范围内。
代码片段:
% 初始化相对状态
x_rel = [10; 0; 0; 0]; % 初始相对位置和速度
u = zeros(3, 1); % 初始控制输入
% DMPC参数
N = 20; % 预测 horizon
Q = diag([1, 1, 1, 1]); % 状态权重
R = 0.1 * eye(3); % 输入权重
% 执行DMPC循环
for k = 1:100
% 优化问题
x_pred = x_rel;
u_pred = optiminput;
for j = 1:N
x_pred(:, j+1) = A * x_pred(:, j) + B * u_pred(:, j);
end
% 代价函数
cost = sum(diag(Q) * (x_pred - [0; 0; 0; 0]).^2) + ...
sum(diag(R) * u_pred.^2);
% 添加约束
constr = norm(x_pred(1:2, :)) >= 1; % 防碰撞约束
% 求解优化问题
[u_opt, cost_opt] = mpc_solve(x_pred, u_pred, cost, constr);
u = u_opt(:, 1);
% 更新状态
x_rel = A * x_rel + B * u;
end分析:
在这个案例中,DMPC需要处理非线性动力学和复杂的约束条件。通过预测相对运动并优化控制输入,两个航天器能够在不相撞的前提下完成交会任务。代码中的优化问题考虑了状态和输入的权重,确保了任务的高效性和安全性。
三、多无人机共识控制:编队飞行的艺术
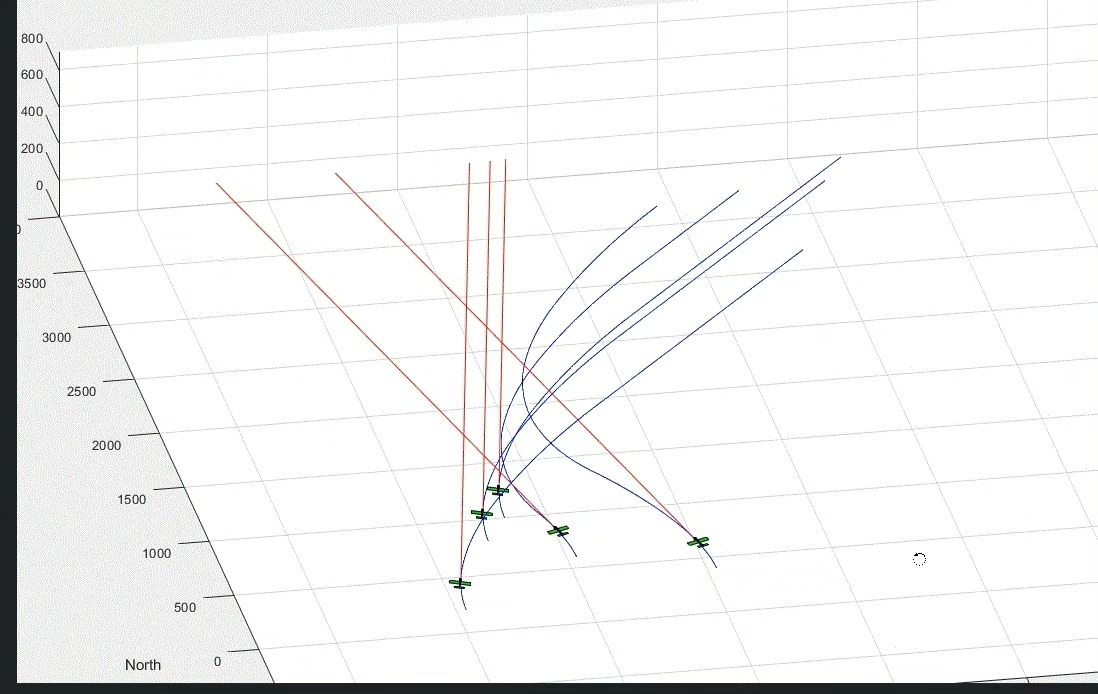
第三个案例是多固定翼无人机的共识控制,目标是让多架无人机保持编队飞行。这种任务广泛应用于物流运输、环境监测等领域。
算法思路:
- 共识目标:每架无人机需要与队形中的其他无人机保持一致的位置和速度。
- 通信图:无人机之间通过局部通信获取邻居的状态信息。
- 预测与优化:基于DMPC框架,每个无人机通过预测邻居的行为调整自身的控制输入。
代码片段:
% 初始化无人机状态
n = 5; % 五架无人机
x = zeros(2, n); % 初始位置和速度
u = zeros(1, n); % 初始控制输入
% DMPC参数
N = 15; % 预测 horizon
Q = diag([1, 0.1]); % 状态权重
R = 0.5; % 输入权重
% 执行DMPC循环
for k = 1:100
for i = 1:n
% 获取邻居的状态
neighbors = get_neighbors(i, n);
x_avg = mean(x(:, neighbors), 2);
% 优化问题
x_pred = x(:, i);
u_pred = optiminput;
for j = 1:N
x_pred(:, j+1) = A * x_pred(:, j) + B * u_pred(:, j);
end
% 代价函数
cost = sum((x_pred - x_avg).^2 * Q) + ...
sum(u_pred.^2 * R);
% 求解优化问题
u(:, i) = mpc_solve(x_pred, u_pred, cost);
end
% 更新状态
x = A * x + B * u;
end分析:
这个代码片段展示了如何通过DMPC实现多无人机的编队飞行。每架无人机通过与邻居的信息交互,不断调整自己的位置和速度,最终达到队形的一致性。可以看到,DMPC在处理大规模多智能体系统时具有显著的优势。
四、多智能体点对点转换:从“我”到“我们”的协作
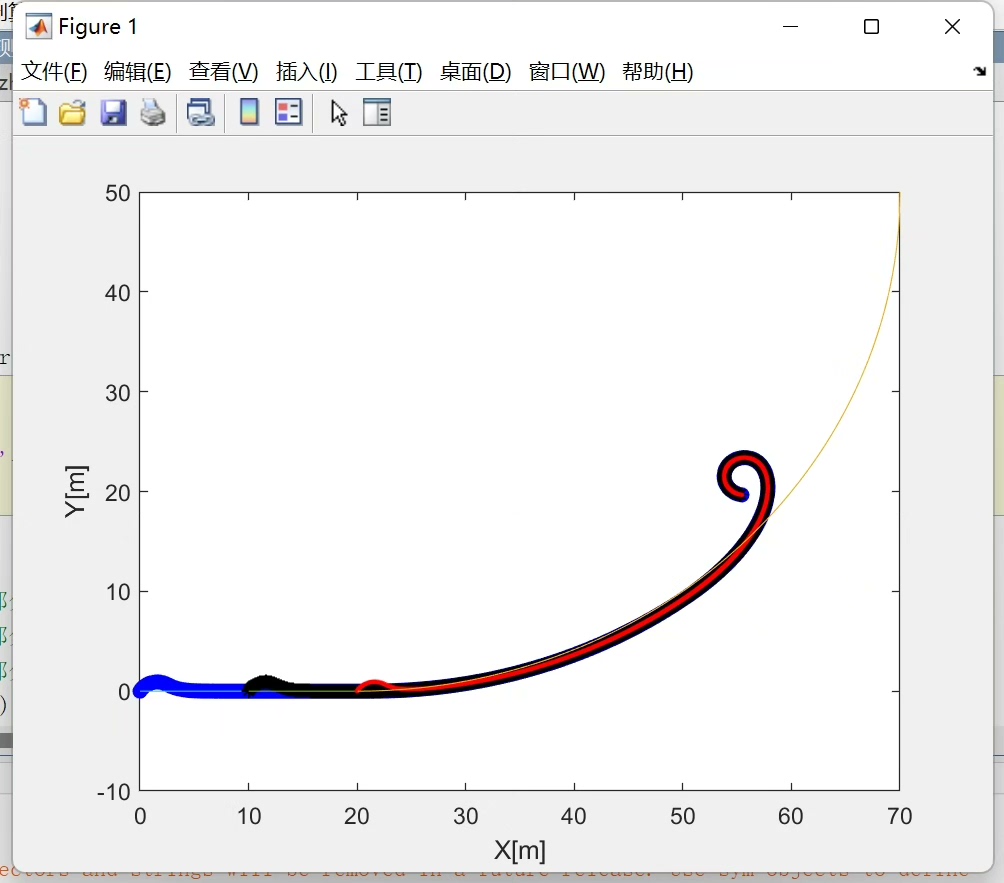
最后一个案例是基于DMPC的多智能体点对点转换控制,目标是让多个智能体从初始位置移动到目标位置,同时保持队形。
算法思路:
- 路径规划:每个智能体根据当前状态和目标状态,规划出一个可行的路径。
- 分布式优化:通过局部优化,确保所有智能体的路径不会发生冲突。
- 实时调整:根据邻居的状态信息,动态调整控制输入。
代码片段:
% 初始化智能体状态
n = 4; % 四个智能体
x = zeros(2, n); % 初始位置和速度
u = zeros(1, n); % 初始控制输入
% 目标位置
x_target = [10, 20; 15, 25; 20, 30; 25, 35]; % 示例目标位置
% DMPC参数
N = 20; % 预测 horizon
Q = diag([1, 0.1]); % 状态权重
R = 0.5; % 输入权重
% 执行DMPC循环
for k = 1:100
for i = 1:n
% 获取邻居的状态
neighbors = get_neighbors(i, n);
x_neighbors = x(:, neighbors);
% 优化问题
x_pred = x(:, i);
u_pred = optiminput;
for j = 1:N
x_pred(:, j+1) = A * x_pred(:, j) + B * u_pred(:, j);
end
% 代价函数
cost = sum((x_pred - x_target(:, i)).^2 * Q) + ...
sum((x_pred - x_neighbors).^2 * 0.1) + ... % 防碰撞
sum(u_pred.^2 * R);
% 求解优化问题
u(:, i) = mpc_solve(x_pred, u_pred, cost);
end
% 更新状态
x = A * x + B * u;
end分析:
在这个案例中,DMPC不仅需要完成路径规划,还需要处理智能体之间的协作问题。通过在代价函数中引入防碰撞项,算法能够确保所有智能体在移动过程中不发生冲突,同时达到目标位置。
总结
通过以上四个案例,我们可以看到,分布式模型预测控制(DMPC)在多智能体协作中具有广泛的应用前景。无论是车队控制、航天器交会,还是无人机编队和点对点转换,DMPC都能通过局部优化和信息交互实现全局的一致性。
分布式模型预测控制matlab源程序包括: 1.多车队列控制算法,实现了三辆车的分布式模型预测控制(程序注解); 2.航天器交会的分布式模型预测控制; 3.基于分布式模型预测控制的多固定翼无人机的共识控制程序; 多智能体点对点转换的分布式模型预测控制;
代码的实现虽然各有不同,但核心思想都是一致的:通过预测模型和优化问题,每个智能体能够在没有集中式控制的情况下,自主调整行为,完成复杂的协作任务。希望这些代码片段和分析能够帮助大家更好地理解DMPC的原理和应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)