当模型预测控制遇上方向盘烫手时刻
MPC+NMPC模型预测控制从原理与代码实现组合装。 MPC包括: mpc模型预测控制详细原理推导 matlab和c++两种编程实现 四个实际控制工程案例: 双积分控制系统 倒立摆控制系统 车辆运动学跟踪控制系统 车辆动力学跟踪控制系统 NMPC包括: NMPC模型预测控制详细原理推导 平行泊车轨迹规划 倒立摆Swing up控制 车辆运动学模型轨迹跟踪 四旋翼无人机轨迹跟踪 包含上述所有的文档和代码。
你盯着屏幕上疯狂抖动的倒立摆仿真动画,手心微微出汗。这已经是本周第七次尝试复现论文里的MPC控制效果,每次仿真到第8秒摆杆就给你表演自由落体。别慌,今天咱们换个姿势——直接把手插进代码里看看控制律到底怎么算的。
MPC:把未来装进矩阵的男人
模型预测控制的核心骚操作在于把未来N步的状态预测写成一个超大的矩阵方程。假设咱有个离散状态空间模型x(k+1)=Ax(k)+Bu(k),把这玩意儿展开成预测形式:
% 构建预测矩阵(Matlab版)
function [Phi, Gamma] = build_prediction_matrix(A,B,N)
Phi = zeros(size(A,1)*N, size(A,1));
Gamma = zeros(size(A,1)*N, size(B,2)*N);
for i=1:N
rows = (i-1)*size(A,1)+1 : i*size(A,1);
Phi(rows,:) = A^i;
for j=1:i
cols = (j-1)*size(B,2)+1 : j*size(B,2);
Gamma(rows,cols) = A^(i-j)*B;
end
end
end这代码干了个狠活——把未来N步的状态x(k+1)...x(k+N)全部表示成当前状态x(k)和控制量序列U的线性组合。当你用quadprog求解二次规划时,目标函数里的H矩阵实际上藏着系统动态的DNA。
C++老哥的暴力美学
切换到C++实现,Eigen库处理矩阵像切黄油:
// 预测方程构建(C++片段)
MatrixXd build_cost_H(const MatrixXd& Q, const MatrixXd& R, const MatrixXd& Gamma, int N) {
MatrixXd H = MatrixXd::Zero(N*u_dim, N*u_dim);
// 填充Q矩阵块
for(int i=0; i<N; ++i){
H.block(i*u_dim, i*u_dim, u_dim, u_dim) = R;
if(i < N-1)
H.block(i*x_dim, i*x_dim, x_dim, x_dim) += Q;
}
return Gamma.transpose() * H * Gamma; // 这才是真正的技术
}这里在玩一个矩阵俄罗斯方块——把权重矩阵Q和R按时间步拼装成块对角矩阵,再和预测矩阵Gamma做三明治乘法。当你在调试时看到H矩阵突然变得正定,那种快感堪比游戏通关。
倒立摆:在悬崖边跳华尔兹
拿倒立摆的案例开刀,约束处理是灵魂操作。假设电机最大扭矩5N·m,代码里要这么搞:
% 输入约束设置
u_min = -5*ones(N,1);
u_max = 5*ones(N,1);
A_ineq = []; b_ineq = [];
A_eq = []; b_eq = [];
options = optimoptions('quadprog','Algorithm','active-set');
[U_opt,~,exitflag] = quadprog(H,f,A_ineq,b_ineq,A_eq,b_eq,u_min,u_max,[],options);但实际跑起来会发现,当摆杆从下垂状态启动时,这个约束会让求解器直接摆烂。这时候得在目标函数里加个松弛变量,就像给控制量穿上弹性裤衩。
MPC+NMPC模型预测控制从原理与代码实现组合装。 MPC包括: mpc模型预测控制详细原理推导 matlab和c++两种编程实现 四个实际控制工程案例: 双积分控制系统 倒立摆控制系统 车辆运动学跟踪控制系统 车辆动力学跟踪控制系统 NMPC包括: NMPC模型预测控制详细原理推导 平行泊车轨迹规划 倒立摆Swing up控制 车辆运动学模型轨迹跟踪 四旋翼无人机轨迹跟踪 包含上述所有的文档和代码。
NMPC:非线性系统的变形金刚
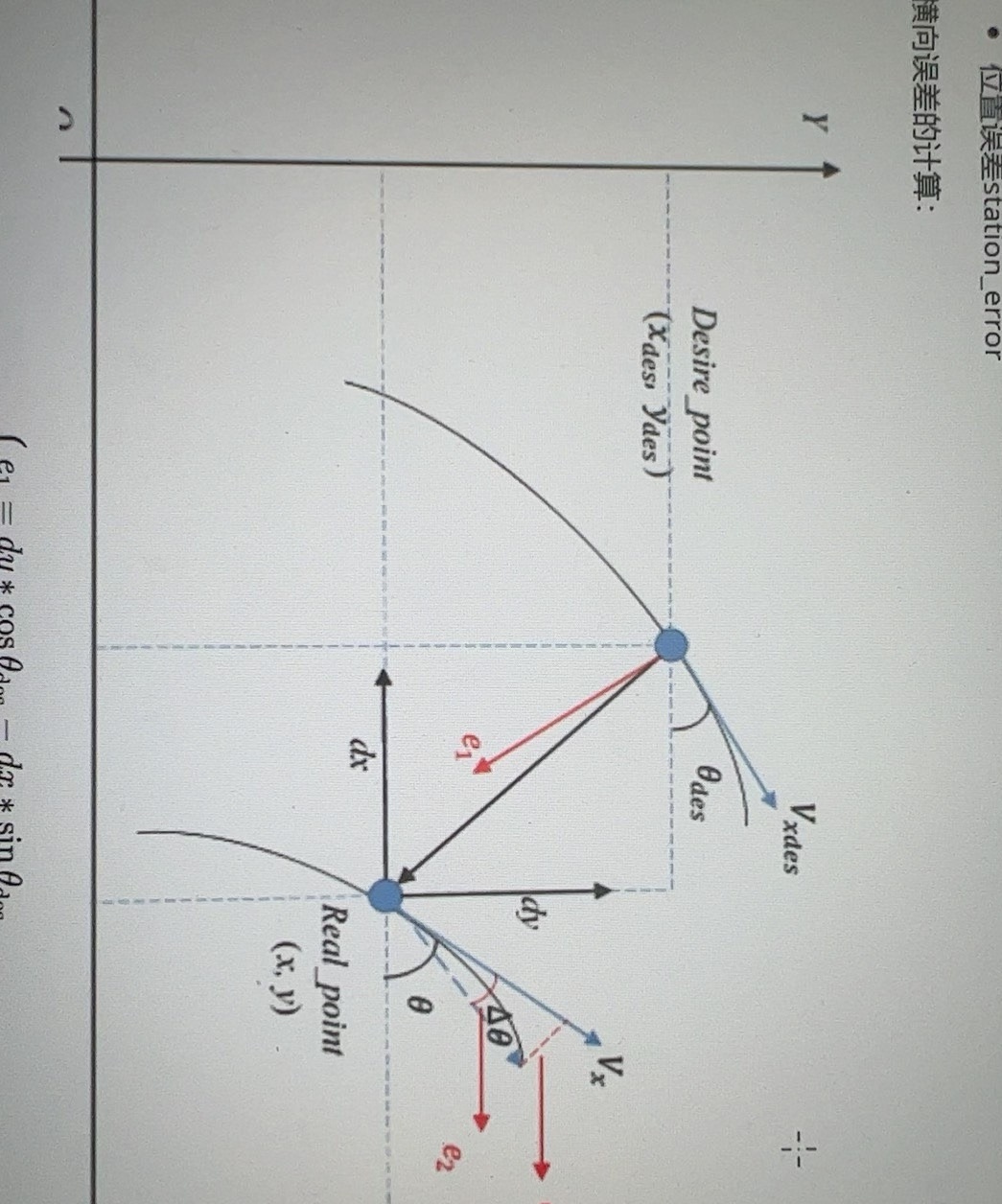
切到NMPC画风突变。平行泊车问题中,车辆模型是妥妥的非线性:
# 车辆运动学模型(CasADi版)
import casadi as ca
x = ca.MX.sym('x'); y = ca.MX.sym('y'); theta = ca.MX.sym('theta')
v = ca.MX.sym('v'); phi = ca.MX.sym('phi')
dt = 0.1
L = 2.5 # 轴距
# 微分方程
dxdt = ca.vertcat(
v*ca.cos(theta),
v*ca.sin(theta),
v*ca.tan(phi)/L
)
F = ca.Function('f', [x,y,theta,v,phi], [dxdt])用CasADi做自动微分时,它会偷偷生成C代码来加速计算。当你在实时测试中看到求解时间从200ms优化到20ms,会感觉像给算法打了类固醇。
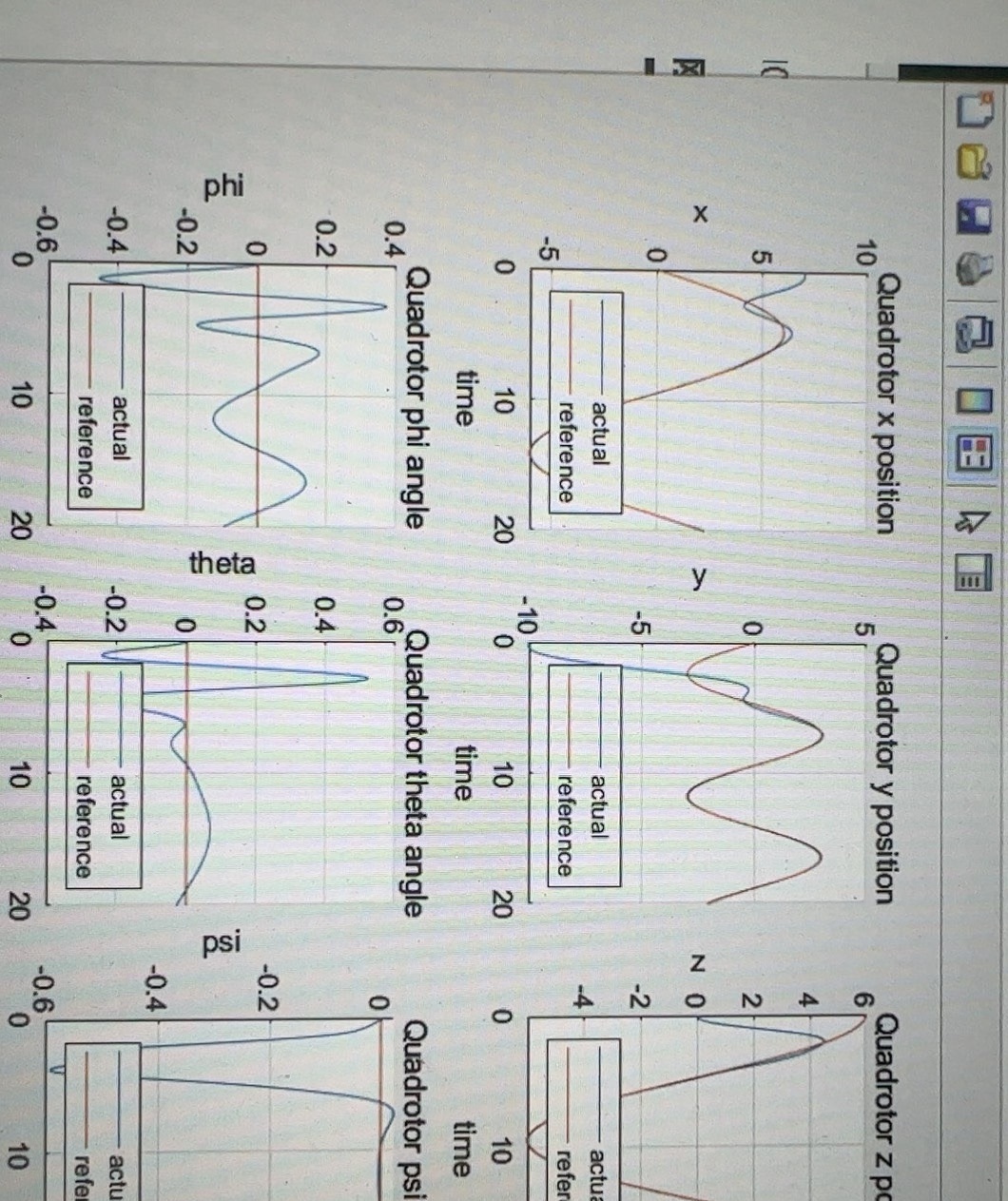
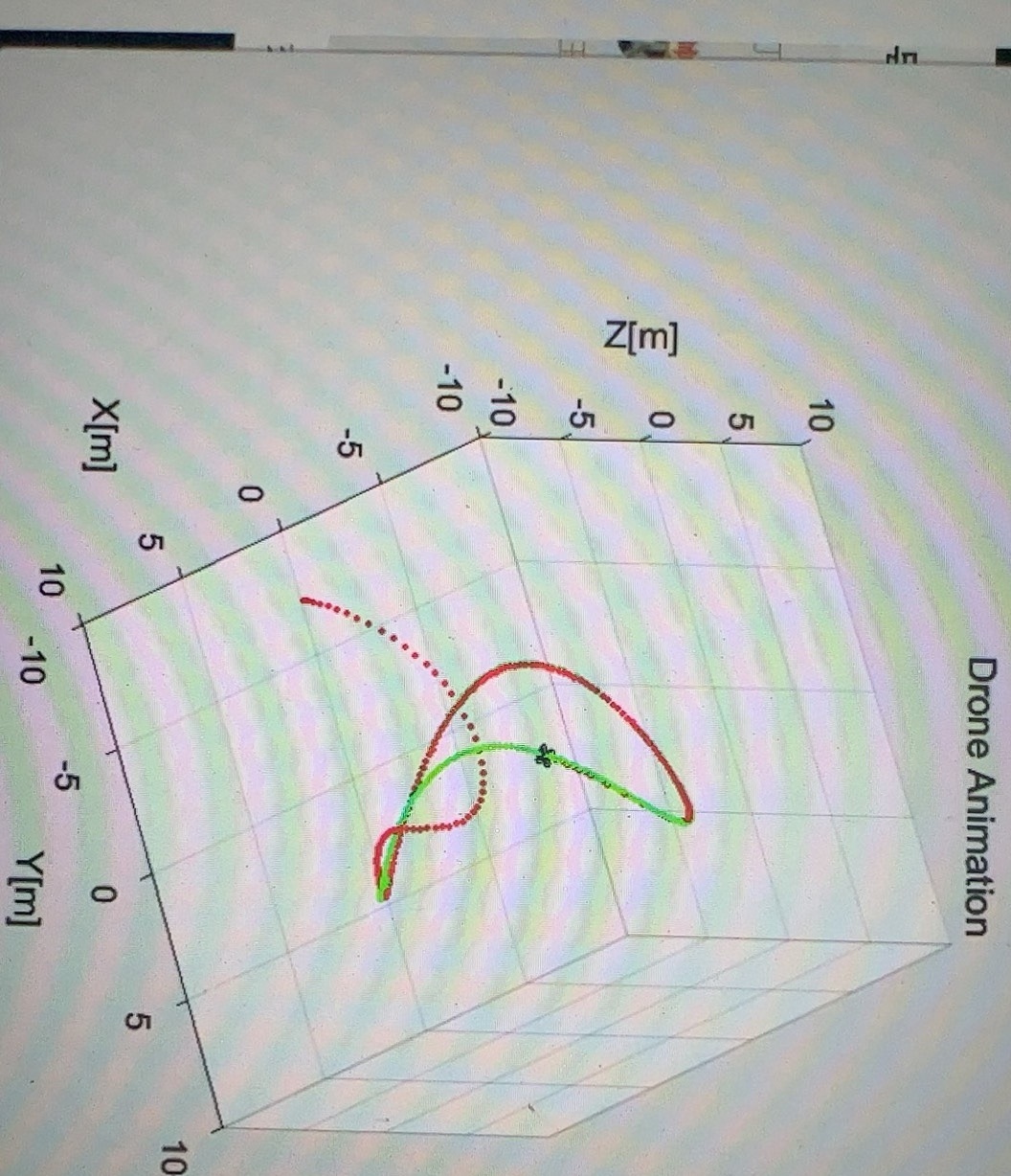
无人机:在四维空间绣花
四旋翼轨迹跟踪的代价函数设计是个艺术活。不仅要惩罚位置误差,还得让横滚/俯仰角变化温柔点:
// 代价函数计算(C++片段)
double cost = 0;
for(int i=0; i<N; ++i){
// 位置误差
cost += 10*pow(x[3*i] - ref_x[i],2);
cost += 10*pow(x[3*i+1] - ref_y[i],2);
// 姿态角变化率惩罚
if(i>0){
cost += 0.1*pow((x[3*i+2] - x[3*(i-1)+2])/dt,2);
}
}调参时发现10这个权重系数能让无人机在风扰下稳如老狗,但再大会导致电机过热——这参数是拿炸机次数换来的经验值。
从仿真到实战的黑暗森林
在车辆动力学跟踪中,当实车测试时发现MPC在80km/h时开始画蛇,原来是轮胎模型在代码里被简化成了线性。赶紧掏出魔术贴——在预测模型里塞入Pacejka轮胎公式,这时NMPC的求解时间飙升。最后祭出大杀器:用C++重写求解器核心,加上warm start技巧,终于让控制频率达标。
(代码仓库见评论区,包含带血丝的调试log和能跑通的版本)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)