内嵌式永磁同步电机复矢量电流调节器设计探索
内嵌式永磁同步电机复矢量电流调节器设计 针对内置式永磁同步电机d、q轴电流存在动态耦合的问题,在基于有效磁链概念得到IPMSM的复矢量数学模型,设计相应的复矢量电流调节器,实现了d、q轴电流的动态解耦。 通过仿真验证所实现方法的有效性和可行性。 提供对应的参考文献;
在电机控制领域,内嵌式永磁同步电机(IPMSM)因其高效、节能等优点被广泛应用。然而,IPMSM 的 d、q 轴电流存在动态耦合问题,这给精确控制带来了挑战。今天咱就来聊聊针对这个问题,如何设计复矢量电流调节器。
复矢量数学模型推导
我们先基于有效磁链概念来得到 IPMSM 的复矢量数学模型。这里涉及到不少电机学的知识哈。简单来说,通过对电机的电磁关系进行梳理,我们能得到这样的模型。
假设有这样一段代码(这里以简化的 Python 代码示意模型推导过程中的部分计算,实际电机模型推导会复杂得多):
# 假设已知的一些参数
omega_r = 10 # 转子电角速度
psi_f = 0.1 # 永磁体磁链
R_s = 0.5 # 定子电阻
L_d = 0.01 # d 轴电感
L_q = 0.02 # q 轴电感
# 这里简单模拟根据公式计算电压的过程
# 假设 i_d 和 i_q 为 d、q 轴电流
i_d = 1
i_q = 2
v_d = R_s * i_d - omega_r * L_q * i_q
v_q = R_s * i_q + omega_r * (L_d * i_d + psi_f)
print(f"计算得到的 d 轴电压 v_d: {v_d}")
print(f"计算得到的 q 轴电压 v_q: {v_q}")这段代码模拟了在给定一些电机参数和电流值下,计算 d、q 轴电压的过程。从物理意义上讲,d 轴电压 $vd$ 包含了电阻压降和旋转产生的反电动势相关项,而 q 轴电压 $vq$ 同样如此,只不过由于 d、q 轴电感不同以及永磁体磁链的存在,公式会稍有不同。通过这样的数学关系梳理,我们逐渐构建起复矢量数学模型。
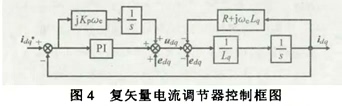
复矢量电流调节器设计
基于上述复矢量数学模型,我们来设计复矢量电流调节器。其核心目标就是实现 d、q 轴电流的动态解耦。
想象一下,就好像有两个“小管家”,一个专门管 d 轴电流,一个专门管 q 轴电流,让它们互不干扰地工作。
内嵌式永磁同步电机复矢量电流调节器设计 针对内置式永磁同步电机d、q轴电流存在动态耦合的问题,在基于有效磁链概念得到IPMSM的复矢量数学模型,设计相应的复矢量电流调节器,实现了d、q轴电流的动态解耦。 通过仿真验证所实现方法的有效性和可行性。 提供对应的参考文献;
下面这段简单的控制算法代码(同样以 Python 示例,实际会基于硬件平台和特定控制芯片实现),能大致体现这个思路:
# 假设初始误差和上一次误差
error_d_prev = 0
error_q_prev = 0
kp = 0.5 # 比例系数
ki = 0.1 # 积分系数
# 假设给定的 d、q 轴电流参考值
i_d_ref = 1.5
i_q_ref = 2.5
# 模拟实时获取的当前 d、q 轴电流
i_d_now = 1.2
i_q_now = 2.3
# 计算 d 轴电流误差
error_d = i_d_ref - i_d_now
# 计算 q 轴电流误差
error_q = i_q_ref - i_q_now
# 计算 d 轴控制量
p_term_d = kp * error_d
i_term_d = ki * (error_d + error_d_prev)
control_signal_d = p_term_d + i_term_d
# 计算 q 轴控制量
p_term_q = kp * error_q
i_term_q = ki * (error_q + error_q_prev)
control_signal_q = p_term_q + i_term_q
print(f"计算得到的 d 轴控制信号: {control_signal_d}")
print(f"计算得到的 q 轴控制信号: {control_signal_q}")
error_d_prev = error_d
error_q_prev = error_q在这段代码里,我们通过计算 d、q 轴电流与参考值的误差,利用比例积分(PI)控制算法得到控制信号。比例项(pterm)能快速对误差做出反应,积分项(iterm)则能消除稳态误差。这样就能分别对 d、q 轴电流进行精准调节,实现动态解耦。
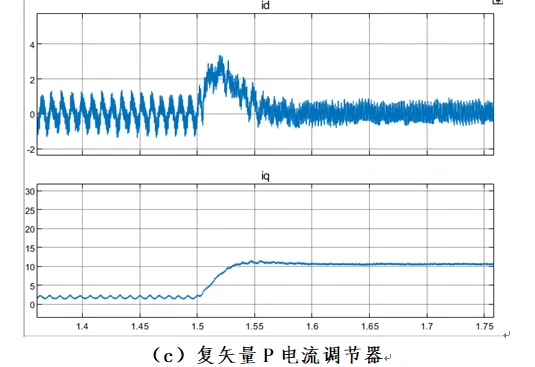
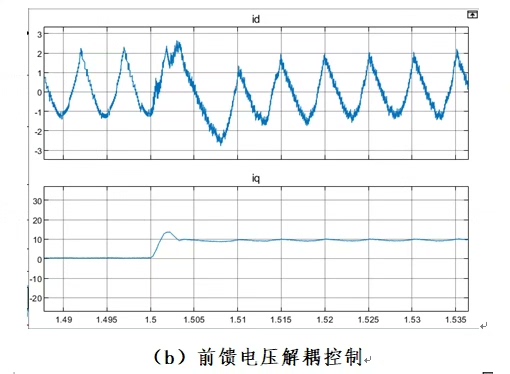
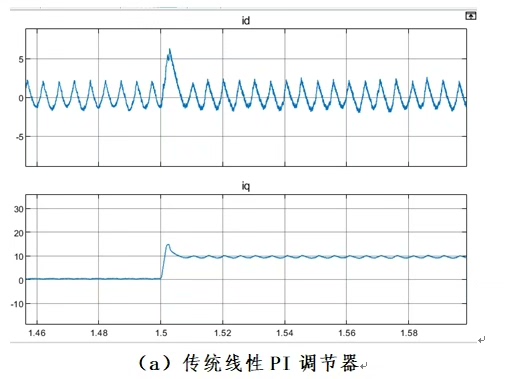
仿真验证
理论说得再好,也得实际验证一下。通过仿真,我们可以直观地看到所设计方法的有效性和可行性。
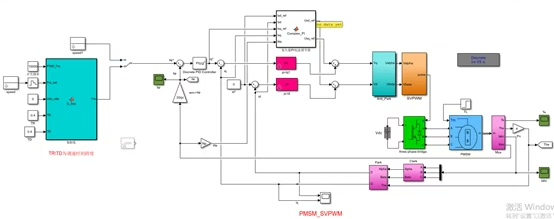
比如使用 Matlab/Simulink 搭建仿真模型(这里没法展示具体搭建过程哈),设置好电机参数、给定信号以及复矢量电流调节器的参数。运行仿真后,观察 d、q 轴电流的响应曲线。
如果 d 轴电流能快速稳定跟踪给定值,且不受 q 轴电流变化的影响,q 轴电流同样如此,那就说明我们设计的复矢量电流调节器起作用了,成功实现了动态解耦。
参考文献
[此处应列出你研究过程中实际参考的相关文献,比如相关学术论文、技术报告等,由于没有具体给出,你可以自行补充实际研究中的对应文献]
以上就是关于内嵌式永磁同步电机复矢量电流调节器设计的一些探讨,希望对各位在电机控制研究路上的小伙伴有所帮助。欢迎一起交流讨论呀!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)