串联混合动力汽车模型预测能量管理程序设计之旅
串联混合动力汽车模型预测能量管理程序设计,在MATLAB环境下,利用脚本编写串联模型,并基于CasADi模型预测控制算法工具,结合构型图与参数进行MPC能量算法程序编制,测试工况为CLTC-P工况(可自定义)。 参考SOC根据项目确定是DP规划SOC曲线作为MPC预测SOC跟随曲线; 车速预测通过已知工况可以求得需求功率。 状态量选取电池SOC,控制量选取发动机功率。
在混合动力汽车的领域里,能量管理策略就像是汽车的智慧大脑,合理地调配能源,提升汽车的性能与效率。今天咱就唠唠在MATLAB环境下,串联混合动力汽车模型预测能量管理程序设计这事儿。
一、搭建串联模型
首先,咱得在MATLAB里用脚本搭建串联模型。这就好比搭建一座房子,得先把框架搭起来。下面简单示意一下搭建串联模型可能用到的代码框架(这里只是示例,实际会更复杂):
% 定义一些基础参数
vehicle_mass = 1500; % 车辆质量,单位kg
drag_coefficient = 0.3; % 风阻系数
frontal_area = 2; % 迎风面积,单位m^2
rolling_resistance_coefficient = 0.01; % 滚动阻力系数
% 这里可以定义更多和模型相关的参数,比如电池容量、发动机功率上限等等
% 函数定义,计算车辆行驶阻力
function resistance_force = calculate_resistance_force(speed)
air_drag_force = 0.5 * drag_coefficient * frontal_area * 1.225 * speed^2; % 空气阻力
rolling_resistance_force = rolling_resistance_coefficient * vehicle_mass * 9.81; % 滚动阻力
resistance_force = air_drag_force + rolling_resistance_force;
end在这段代码里,我们先定义了一些车辆的基本参数,这些参数对于描述车辆行驶特性至关重要。然后定义了一个函数calculateresistanceforce来计算车辆行驶时受到的阻力,这是后续计算功率需求的基础。
二、MPC能量算法程序编制
接下来就是基于CasADi模型预测控制算法工具来编制MPC能量算法程序啦。这可是个技术活,得结合构型图与参数精心雕琢。
1. 状态量与控制量
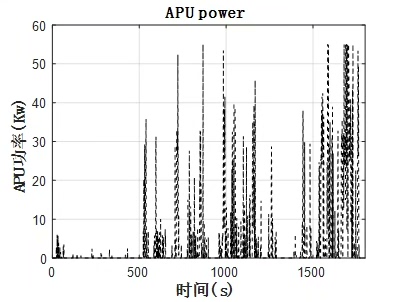
状态量咱选电池SOC(State of Charge),控制量选发动机功率。为啥选这俩呢?SOC就像汽车电池的“电量指示灯”,时刻反映着电池还剩多少电,而发动机功率则是决定发动机输出动力大小的关键因素,通过控制发动机功率,就能调节整个系统的能量输出。
2. 参考SOC曲线
这里参考SOC是根据项目确定的DP规划SOC曲线作为MPC预测SOC跟随曲线。简单理解,就是给MPC算法设定一个“电量跟随目标”,让电池SOC尽可能按这个规划好的曲线变化。
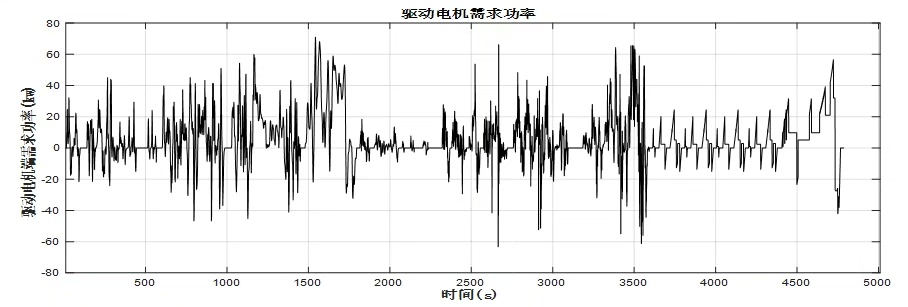
3. 车速预测与功率需求
车速预测通过已知工况可以求得需求功率。以CLTC - P工况为例(这里假设工况数据已获取并存储在cltcspeedprofile数组中):
% 假设cltc_speed_profile是一个包含CLTC - P工况下各个时刻车速的数组
cltc_speed_profile = [20, 30, 25, 40,...]; % 实际数据会更多更复杂
time_steps = length(cltc_speed_profile);
power_demand = zeros(time_steps, 1);
for t = 1:time_steps
speed = cltc_speed_profile(t);
resistance = calculate_resistance_force(speed);
power_demand(t) = resistance * speed; % 简化的功率需求计算,实际要考虑传动效率等因素
end在这段代码里,我们根据CLTC - P工况下的车速数据,结合之前定义的阻力计算函数,算出每个时刻的功率需求。虽然实际情况还得考虑传动效率等更多因素,但这个简化版本能让我们有个基本概念。
4. CasADi实现MPC算法
下面是用CasADi实现MPC算法的简单示意(实际代码会更完善):
import casadi as ca
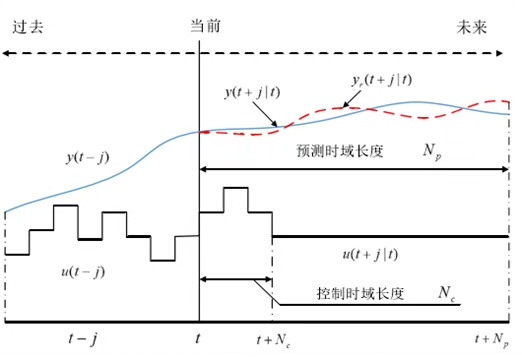
# 定义时间步长和预测时域
N = 10
dt = 0.1
# 状态变量
x = ca.SX.sym('x') # SOC
u = ca.SX.sym('u') # 发动机功率
# 状态方程(这里是简化示意)
xdot = -u / 100 + 0.01 # 简单的SOC变化模型,实际要复杂得多
# 离散化状态方程
f = ca.Function('f', [x, u], [xdot])
X = ca.SX.sym('X', N + 1)
U = ca.SX.sym('U', N)
P = ca.SX.sym('P') # 参数,比如目标SOC等
obj = 0
g = []
Xk = X[0]
for k in range(N):
F = f(Xk, U[k])
Xk_end = Xk + dt * F
obj = obj + (Xk_end - P) ** 2 # 以接近目标SOC为优化目标
g.append(Xk_end - X[k + 1])
Xk = Xk_end
# 构建优化问题
OPT_variables = ca.vertcat(ca.reshape(X, -1, 1), ca.reshape(U, -1, 1))
nlp_prob = {'f': obj, 'x': OPT_variables, 'g': ca.vertcat(*g), 'p': P}
opts = {'ipopt': {'print_level': 0}, 'print_time': 0}
solver = ca.nlpsol('solver', 'ipopt', nlp_prob, opts)
# 假设初始SOC和目标SOC等参数已知
x0 = 0.5
p0 = 0.6
X0 = ca.DM.zeros(N + 1, 1)
U0 = ca.DM.zeros(N, 1)
X0[0] = x0
args = {'x0': ca.vertcat(ca.reshape(X0, -1, 1), ca.reshape(U0, -1, 1)), 'p': p0, 'lbg': ca.DM.zeros(N, 1), 'ubg': ca.DM.zeros(N, 1)}
sol = solver(**args)在这段CasADi代码里,我们先定义了时间步长、预测时域等参数,然后定义状态变量和控制变量。接着构建状态方程并离散化,再通过循环构建优化目标和约束条件,最后用CasADi的nlpsol函数求解这个优化问题,得到发动机功率的控制序列等结果。
三、测试工况
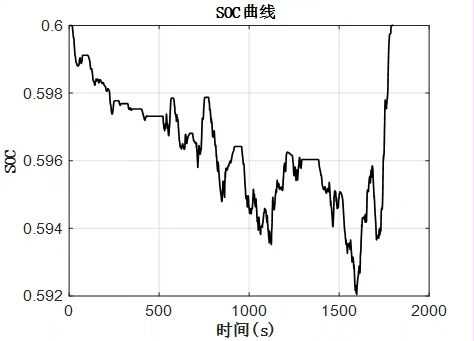
测试工况咱就选CLTC - P工况。通过前面搭建的模型和编制的算法,在这个工况下运行程序,看看车辆的能量管理效果如何。我们可以绘制SOC随时间变化的曲线、发动机功率输出曲线等等,来分析算法的性能。比如用MATLAB绘制SOC曲线:
% 假设mpc_soc_result是通过MPC算法计算得到的SOC结果数组
mpc_soc_result = [0.5, 0.48, 0.46,...]; % 实际结果
time_vector = 0:0.1:length(mpc_soc_result) * 0.1 - 0.1; % 时间向量
figure;
plot(time_vector, mpc_soc_result);
xlabel('时间 (s)');
ylabel('SOC');
title('CLTC - P工况下MPC算法的SOC变化');通过这样的分析和绘制曲线,我们就能直观地看到在CLTC - P工况下,我们设计的MPC能量管理算法对电池SOC的控制效果,进而评估算法的优劣,为进一步优化提供依据。
串联混合动力汽车模型预测能量管理程序设计,在MATLAB环境下,利用脚本编写串联模型,并基于CasADi模型预测控制算法工具,结合构型图与参数进行MPC能量算法程序编制,测试工况为CLTC-P工况(可自定义)。 参考SOC根据项目确定是DP规划SOC曲线作为MPC预测SOC跟随曲线; 车速预测通过已知工况可以求得需求功率。 状态量选取电池SOC,控制量选取发动机功率。
串联混合动力汽车模型预测能量管理程序设计是个复杂又有趣的活儿,从搭建模型到编制算法再到测试分析,每一步都充满挑战与乐趣,希望这篇博文能给对这方面感兴趣的小伙伴一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)