基于OpenCV的排雷模拟可视化系统开发实践
1. 项目简介
排雷是一项高风险、高技术要求的人道主义工作。为了研究不同环境、地雷类型和探测技术对排雷效率与风险的影响,本文开发了一个 基于C++17和OpenCV的排雷模拟可视化系统。该系统通过数学模型模拟地雷探测、风险分析和排雷过程,并提供实时可视化界面,帮助研究人员和操作人员直观理解排雷作业中的关键参数变化。
项目核心功能包括:
-
环境参数(温度、湿度、土壤类型等)建模
-
地雷物理特性(埋深、金属含量、年龄等)定义
-
多种探测技术(金属探测、红外成像、探地雷达等)模拟
-
排雷操作效率与风险计算
-
实时可视化:网格地图、地雷分布、风险热图、热成像、传感器数据面板、排雷机器人路径
项目采用CMake构建,依赖OpenCV进行图像渲染与交互。
2. 技术栈
-
语言: C++17
-
图形库: OpenCV 4.7.0(用于图像显示、颜色映射、绘图)
-
构建工具: CMake 3.10+
-
随机数: C++11
<random> -
配置文件: JSON(示例给出,未实际解析,可扩展)
3. 项目结构
MineClearanceSimulation/
├── CMakeLists.txt # 构建脚本
├── config.json # 模拟参数配置(未实际加载,仅供说明)
├── mine_clearance_model.h # 数学模型类声明
├── mine_clearance_model.cpp# 数学模型类实现
└── visualization_system.cpp# 可视化系统及主函数4. 核心代码解析
4.1 数学模型 (MineClearanceModel)
该类封装了排雷过程中涉及的物理与统计模型,通过输入环境、地雷、探测系统、排雷操作和风险参数,计算关键输出指标。
4.1.1 数据结构
定义了多个结构体,用于组织输入参数:
-
EnvironmentParams: 环境参数,包括温度、湿度、土壤类型、风速、降水量等。 -
MineParams: 地雷属性,如类型、埋深、金属含量、年龄、腐蚀程度等。 -
DetectionParams: 探测系统参数,包括技术类型、灵敏度、虚警率、操作员技能等。 -
ClearanceParams: 排雷操作参数,如速度、成功率、伤亡风险等。 -
RiskParams: 风险评估参数,如遭遇概率、后果严重性、暴露时间等。
4.1.2 核心计算流程
calculateAllParameters() 按顺序调用以下私有方法,更新所有中间变量和最终指标:
-
有效深度
calculateEffectiveDepth()
考虑土壤类型、湿度和地雷年龄对实际探测深度的影响。 -
信号衰减
calculateSignalAttenuation()
基于有效深度、土壤衰减因子和天气影响计算信号损失。 -
磁异常
calculateMagneticAnomaly()
根据地雷磁特征、埋深、背景噪声和腐蚀程度计算磁异常值。 -
热对比度
calculateThermalContrast()
根据地雷热特征、太阳辐射、昼夜因子等计算热成像对比度。 -
声学响应
calculateAcousticResponse()
考虑背景噪声、土壤阻尼和风速计算声学信号。 -
探测概率
calculateDetectionProbability()
结合技术因子、信号强度、信噪比、操作员技能和校准状态计算最终探测概率。 -
虚警概率
calculateFalsePositiveProbability()
根据环境噪声、地形杂波和技术类型计算误报率。 -
排雷效率
calculateClearanceEfficiency()
基于设备可靠性、操作员表现和环境因素计算成功率。 -
总风险
calculateTotalRisk()
综合探测风险、虚警风险、排雷风险和暴露风险,并考虑风险容忍度。 -
作战准备状态
calculateOperationalReadiness()
评估探测、排雷、设备和人员的综合准备度。
4.1.3 Getter 函数
为了便于可视化系统访问计算结果,提供了多个 get 方法,如 getDetectionProbability()、getTotalRisk()、getMagneticAnomaly() 等。
4.2 可视化系统 (VisualizationSystem)
该类负责绘制图形界面,实时更新模型参数并显示各种图层。
4.2.1 成员变量
-
displayCanvas: 主画布,最终显示图像。 -
sensorDisplay: 传感器数据面板。 -
riskMap: 风险地图(灰度图,用于生成彩色热图)。 -
thermalMap: 热成像图(灰度图)。 -
minePositions: 地雷位置列表。 -
clearancePath: 排雷路径点。 -
model:MineClearanceModel实例。
4.2.2 初始化
构造函数设置画布大小、网格尺寸,并调用:
-
initializeMinefield(): 随机生成地雷位置。 -
initializeThermalMap(): 创建热成像图,基础温度20°C,地雷位置附近温度升高。
4.2.3 绘制函数
-
drawGrid(): 绘制网格背景。 -
drawMines(): 根据地雷探测概率用不同颜色绘制地雷图标(红/橙/黄)。 -
drawDetectionArea(): 以半透明绿色圆圈显示探测区域,透明度与探测概率相关。 -
drawRiskMap(): 计算每个网格点的风险值(基于地雷距离和总风险),生成风险热图叠加到主画布。 -
drawThermalOverlay(): 将热成像图缩放到1/3大小,显示在左上角。 -
drawSensorData(): 显示传感器读数面板,包含探测概率、虚警率、总风险等。 -
drawClearancePath(): 生成并绘制排雷机器人的路径,机器人用青色圆圈表示。 -
drawInformationPanel(): 底部信息面板,显示模拟状态和网格信息。
4.2.4 主循环
run() 方法进入无限循环,每帧:
-
调用
updateVisualization()更新画布。 -
显示图像,处理键盘输入(退出、重置地雷场、保存状态、暂停)。
4.2.5 状态保存
saveCurrentState() 将模型报告和地雷位置写入文本文件,并保存当前画布截图。
5. 配置文件说明 (config.json)
尽管当前代码未实现JSON解析,但配置文件定义了所有模拟参数的默认值,方便后续扩展。主要包含以下部分:
-
simulation: 画布尺寸、网格大小、地雷数量、速度等。 -
environment: 环境参数范围。 -
mines: 地雷类型分布、埋深范围、年龄范围等。 -
detection: 探测技术、灵敏度、虚警率等。 -
clearance: 排雷机器人参数。 -
visualization: 颜色方案、更新间隔等。
未来可通过JSON解析库(如nlohmann/json)动态加载参数,使系统更加灵活。
6. 编译与运行
6.1 环境准备
-
安装CMake (≥3.10)
-
sudo apt install libopencv-dev # Ubuntu
6.2 编译步骤
mkdir build && cd build
cmake ..
make -j46.3 运行
./mine_simulation [width height grid]可选参数:画布宽度、高度、网格像素(默认1200 800 25)。
程序启动后,将显示可视化窗口,可通过键盘控制:
-
ESC/Q: 退出
-
R: 重新生成地雷场
-
S: 保存当前状态(报告+截图)
-
空格: 暂停
7. 遇到的问题与解决方案
7.1 链接错误:未定义的引用
错误信息:
undefined reference to `MineClearanceModel::getTotalRisk() const'
...
undefined reference to `MineClearanceModel::MineClearanceModel()'原因:在 mine_clearance_model.h 中声明了构造函数和getter函数,但在 .cpp 文件中未提供实现。链接器无法找到这些符号。解决方法:
double MineClearanceModel::getTotalRisk() const { return total_risk; }
EnvironmentParams MineClearanceModel::getEnvironmentParams() const { return env; }-
同时确保构造函数初始化列表正确初始化所有成员变量。
7.2 OpenCV applyColorMap 类型错误
错误信息:
cv::ColorMap only supports source images of type CV_8UC1 or CV_8UC3原因:cv::applyColorMap 要求输入图像是8位单通道或三通道,而项目中 riskMap 和 thermalMap 最初定义为 CV_32FC1(浮点单通道)。直接传入会抛出异常。
解决方案:
-
将
riskMap和thermalMap的类型改为CV_8UC1。cv::normalize(riskMapFloat, riskMapFloat, 0, 255, cv::NORM_MINMAX);riskMapFloat.convertTo(riskMap, CV_8UC1); -
对于
thermalMap同样处理。
7.3 随机数生成问题
问题:地雷位置随机生成时,可能出现重叠或边界溢出。
处理:在 initializeMinefield() 中,使用网格对齐确保地雷位于网格交点上,避免重叠:
int x = distX(rng) / gridSize * gridSize;
int y = distY(rng) / gridSize * gridSize;同时限制范围在画布边界内。
7.4 图像叠加时的尺寸不匹配
问题:drawThermalOverlay() 中将热成像图缩放到1/3大小,但直接复制到主画布的固定区域可能导致越界。
处理:使用 cv::Rect 确保目标区域在画布内,并在复制前检查尺寸:
cv::resize(thermalDisplay, thermalDisplay, cv::Size(canvasWidth/3, canvasHeight/3));
thermalDisplay.copyTo(displayCanvas(cv::Rect(10, 10, thermalDisplay.cols, thermalDisplay.rows)));8. 运行效果展示
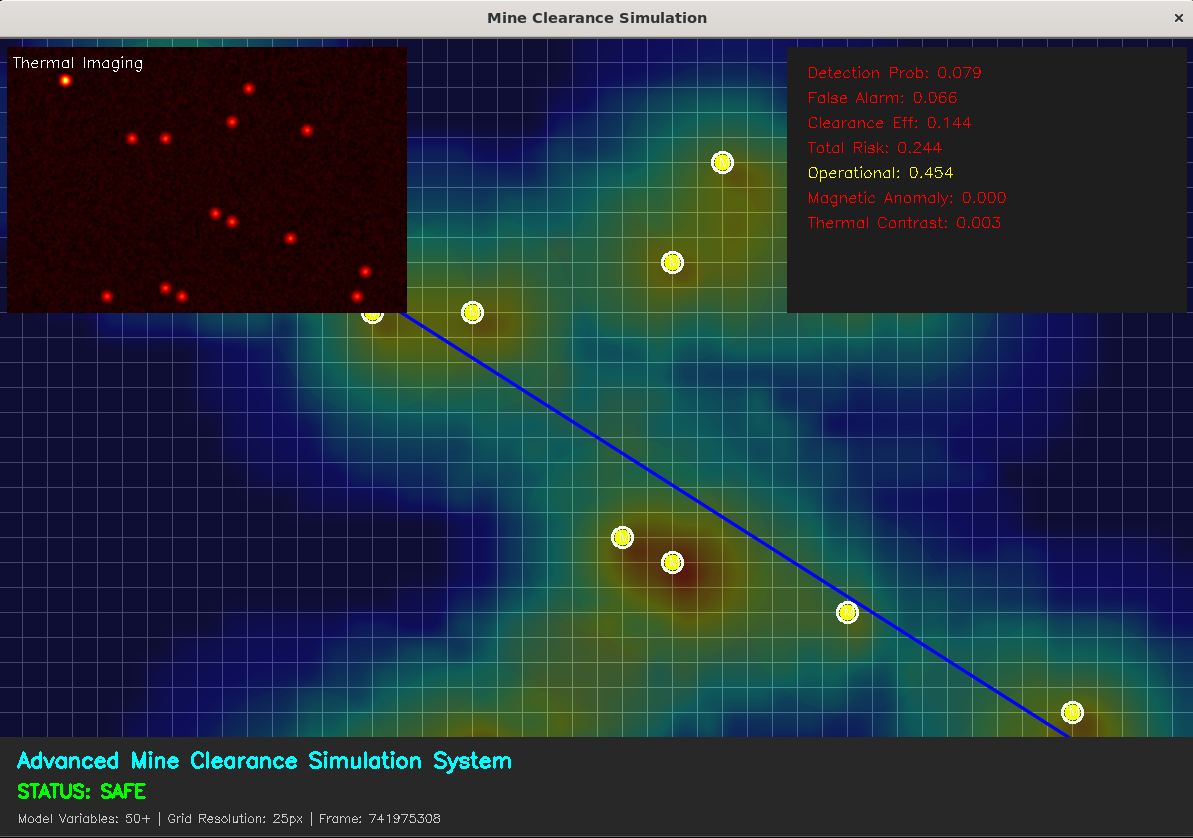
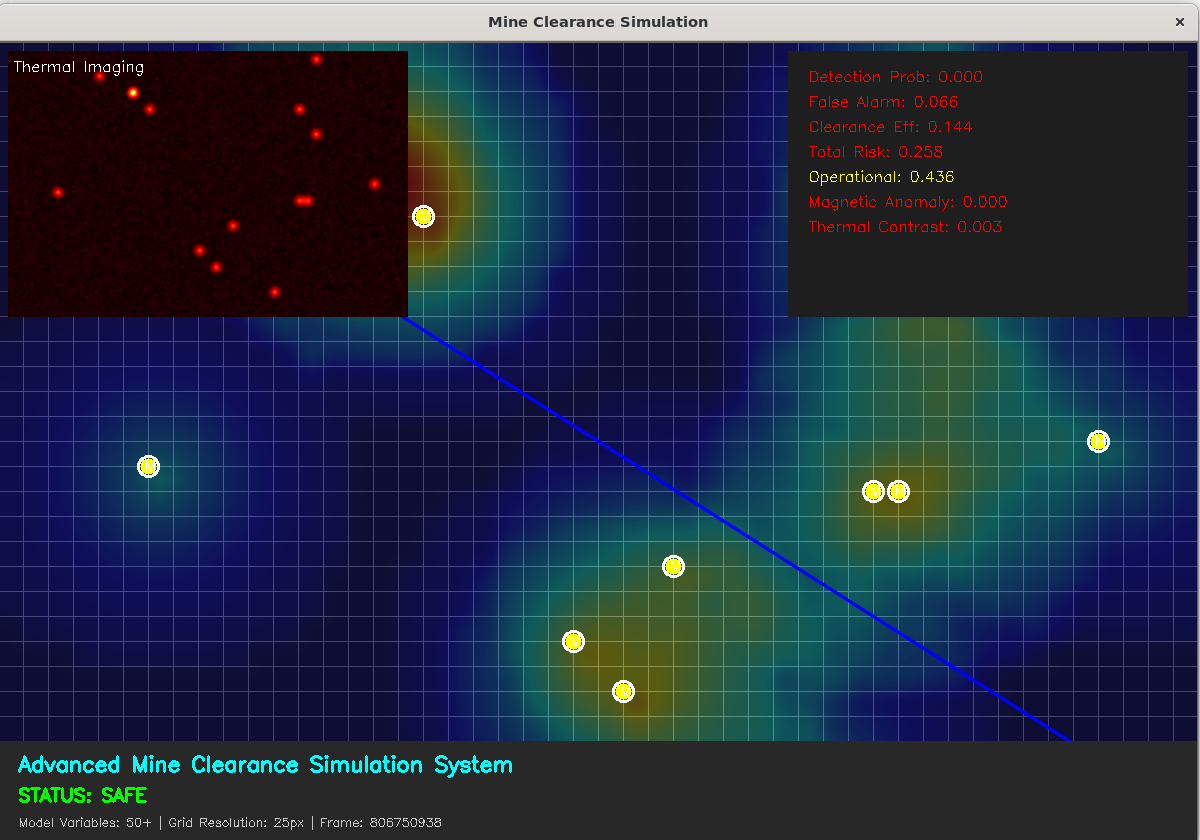
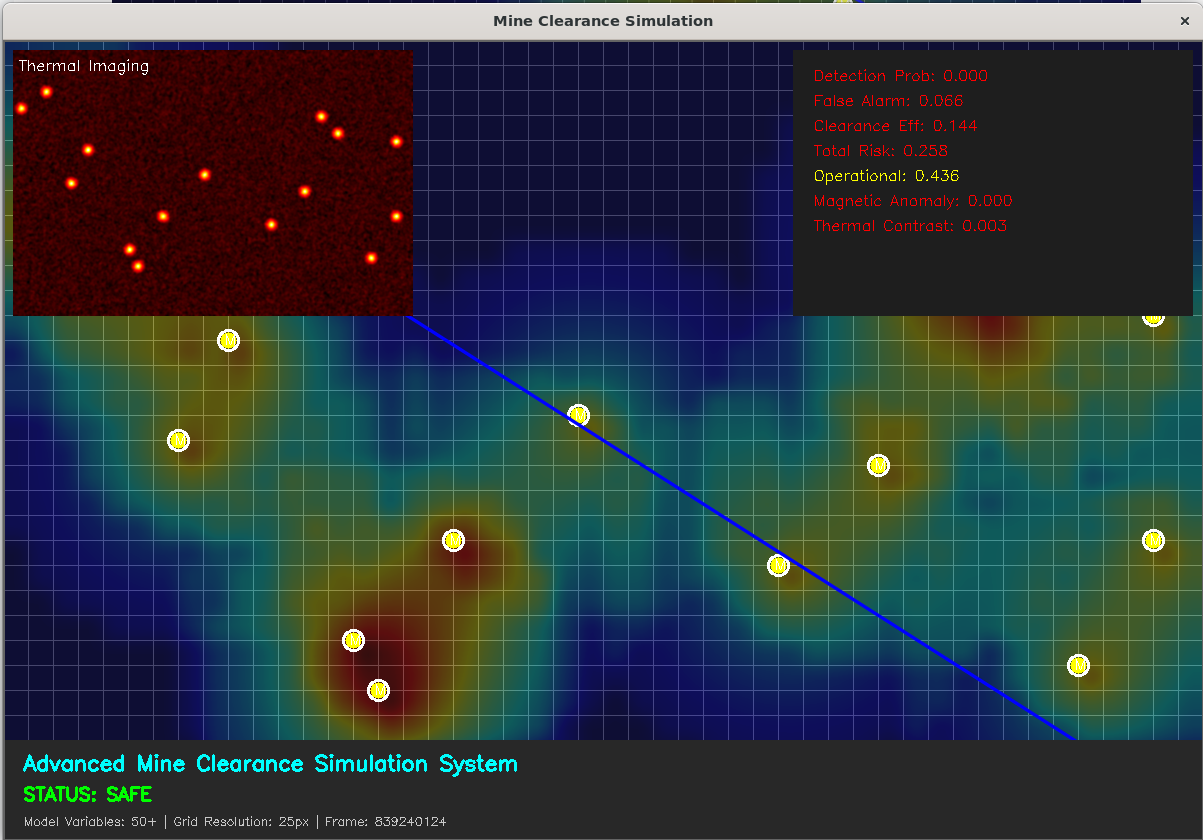
运行程序后,主窗口显示:
-
灰色网格背景
-
地雷以彩色圆点显示(红/橙/黄)
-
风险热图以半透明方式叠加(蓝-青-黄-红渐变)
-
左上角显示热成像小窗口
-
右上角显示传感器数据面板
-
排雷机器人沿蓝色路径移动
-
底部信息面板显示状态和参数
通过按键 R 可以重新生成随机地雷场,S 保存当前状态,直观感受不同环境下的风险变化。
9. 总结
本项目实现了一个功能完整的排雷模拟可视化系统,融合了物理模型、统计计算和实时图形渲染。通过解决链接错误和OpenCV类型问题,系统能够稳定运行。未来可以扩展的功能包括:
-
使用JSON解析动态加载配置
-
添加更多探测技术模型(如探地雷达、核四极共振)
-
实现更智能的路径规划算法(如A*)
-
记录历史数据并绘制趋势图
该项目不仅可用于教学演示,也为排雷策略研究提供了基础仿真平台。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 14
14 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)