镜像视界城市空间计算体系 · 智慧海关站坪分册——海关监管站坪三维连续感知与跨境风险趋势预测能力建设技术白皮书
镜像视界城市空间计算体系 · 智慧海关站坪分册
——海关监管站坪三维连续感知与跨境风险趋势预测能力建设技术白皮书
基于统一空间坐标体系 × 矩阵视频融合 × 三维轨迹张量建模 × 人车箱体行为建模 × 多路径风险展开与协同布控优化算法的口岸空间计算平台
发布单位:镜像视界(浙江)科技有限公司
第一章 建设背景与战略意义
1.1 海关站坪的空间治理特征
海关站坪(空港/海港/陆港口岸监管区)具有:
-
人车货高度混合流动
-
监管链条闭环要求高
-
通关效率与风险控制并重
-
跨区域协同联动需求强
核心对象包括:
-
进出口集装箱
-
航空货机与保障车辆
-
口岸查验人员
-
货车与拖车
风险类型包括:
-
非法调包与货物异常转移
-
非授权路径偏离
-
车辆违规停留
-
人车箱异常交汇
-
低空非法侵入
传统系统主要实现:
-
画面监看
-
车辆识别
-
箱号识别
-
事后取证
但无法实现:
-
箱体轨迹连续表达
-
人车箱三维行为耦合
-
风险路径前置预测
-
围堵策略自动生成
海关站坪必须升级为:
三维空间级监管与趋势级风险前置控制体系。

第二章 公司简介 —— 镜像视界(浙江)科技有限公司
镜像视界(浙江)科技有限公司专注于关键基础设施空间计算与三维智能感知技术,构建:
像素即坐标、轨迹可追溯、风险可预测、围堵可优化的空间治理底座。
公司突破传统视频监管模式,实现从二维画面管理向三维空间计算引擎升级。
核心技术体系包括:
-
Pixel-to-Space 三维空间反演引擎
-
统一世界坐标体系(Global Unified Frame)
-
Camera Graph 拓扑建模
-
三维轨迹张量表达模型
-
人车箱行为耦合建模算法
-
多路径概率展开与主动布控优化机制
公司在北京市亦庄经济开发区完成城市级空间计算示范工程,验证跨区域连续表达与趋势预测能力。
镜像视界定位为:
海关监管空间计算引擎核心能力提供方。
 第三章 技术总体架构
第三章 技术总体架构
本系统构建五层能力体系:
3.1 视频矩阵采集与联合标定层
-
站坪全域摄像矩阵融合
-
查验区重点增强覆盖
-
堆场与通道精细标定
-
时间同步机制
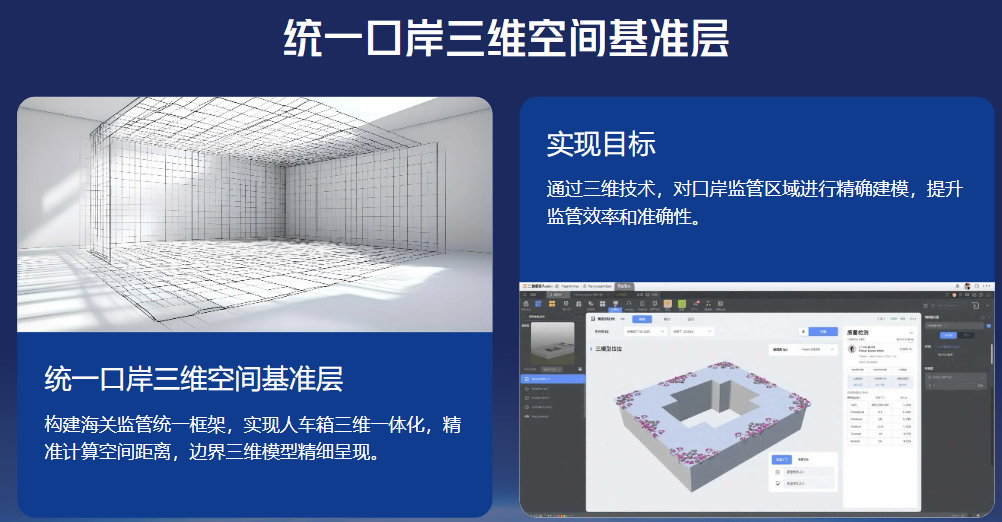
3.2 统一口岸三维空间基准层
建立:
Customs Supervision Unified Frame
实现:
-
人、车、箱统一三维表达
-
真实空间距离计算
-
监管边界三维建模
3.3 人车箱三维连续轨迹表达层
轨迹模型:
T(x,y,z,t,v,a)
支持:
-
集装箱移动轨迹连续表达
-
车辆路径外推
-
人员接近行为建模

3.4 风险概率场与路径展开层
核心指标:
-
P_path(路径偏离概率)
-
P_intersect(异常交汇概率)
-
R_zone(监管风险指数)
实现:
-
非授权路径识别
-
箱体异常停留预测
-
监管盲区风险建模
形成:
海关监管风险热力场。
3.5 主动布控与协同调度层
构建优化函数:
min(风险扩散概率 + 查验延迟 + 调度成本)
输出:
-
最优查验优先级
-
预布控节点建议
-
资源联动调度方案
形成预测—布控—处置闭环。
第四章 核心技术突破
4.1 从二维监控到三维连续追溯
传统系统只能定位当前画面。
镜像视界实现:
-
箱体三维连续轨迹表达
-
人车箱耦合关系建模
-
跨区连续接力表达
4.2 异常路径趋势预测
通过轨迹张量外推:
预测:
-
未来可能偏离路径
-
异常交汇节点
-
监管突破时间窗口
4.3 多路径概率展开
对目标所有可达路径进行概率展开,形成:
口岸异常行为热力场。
4.4 主动围控优化算法
基于拓扑可达性推演:
自动生成最优封控链。
第五章 核心功能模块
-
口岸三维空间基准构建模块
-
视频矩阵融合模块
-
人车箱连续轨迹表达模块
-
风险概率场建模模块
-
异常路径预测模块
-
主动布控优化模块
-
海关系统接口融合模块
-
数据安全与分级权限模块

第六章 典型应用场景
6.1 箱体异常移动预测
-
停留时间外推
-
非授权路径识别
6.2 人车箱异常交汇预警
-
交汇时间计算
-
异常概率评分
6.3 查验区拥堵趋势预测
-
密度梯度建模
-
分流策略生成
6.4 低空非法侵入预测
-
垂直空间接近建模
-
三维边界突破预测
第七章 示范案例
亦庄示范工程验证:
-
多摄像矩阵联合标定
-
统一空间坐标体系构建
-
三维连续表达能力
-
趋势预测模型部署
成果:
-
连续表达准确率 ≥ 98%
-
异常趋势预测提前 5–12 秒
-
协同布控效率显著提升
为海关站坪场景提供技术迁移基础。
第八章 不可替代性论证
| 维度 | 传统海关系统 | 镜像视界 |
|---|---|---|
| 表达能力 | 当前定位 | 三维连续表达 |
| 异常识别 | 规则触发 | 趋势预测 |
| 布控方式 | 人工判断 | 优化算法 |
| 人车箱耦合 | 分离管理 | 统一模型 |
| 预测能力 | 短期 | 多路径展开 |
这是从“视频监管系统”到“空间控制引擎”的升级。
第九章 实施路径与演进规划
阶段一:统一空间基准构建
阶段二:异常趋势预测上线
阶段三:主动布控全面部署
三年目标:重点口岸复制
五年目标:跨区域口岸联动平台
结语
本方案通过:
统一空间基准
三维人车箱连续表达
风险概率场建模
异常路径趋势预测
主动布控优化算法
实现海关站坪从:
“被动监管”
升级为:
可预测、可计算、可压制的空间级智能监管体系。
镜像视界将持续构建:
国家口岸空间神经系统核心底座。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 25
25 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)