探索MATLAB电动助力转向系统模型
MATLAB电动助力转向系统模型 simulink搭建整车二自由度模型、助力特性曲线模型、助力电机模型、齿条模型等。 模型控制方法简单,具有参考和建模公式等。 输入:前轮转角、方向盘力矩等 输出:转向助力力矩等
在汽车工程领域,电动助力转向系统(EPS)是一项关键技术,它不仅提升了驾驶的舒适性,还增强了车辆的安全性。今天咱们就来唠唠基于MATLAB的电动助力转向系统模型,带你领略这背后的技术魅力。
一、Simulink搭建各关键模型
1. 整车二自由度模型
整车二自由度模型是研究车辆转向特性的基础。在Simulink里搭建这个模型,能帮助我们理解车辆在转向过程中的动力学表现。
咱们来看一段简单的代码示例(假设使用MATLAB脚本辅助搭建部分逻辑):
% 定义车辆参数
m = 1500; % 车辆质量 (kg)
lf = 1.2; % 质心到前轴距离 (m)
lr = 1.5; % 质心到后轴距离 (m)
Iz = 2500; % 车辆绕z轴转动惯量 (kg·m^2)这段代码定义了车辆的一些基本参数,质量 m、质心到前后轴的距离 lf 和 lr,以及绕 z 轴的转动惯量 Iz。这些参数在整车二自由度模型中至关重要,它们决定了车辆在转向时的惯性、力矩分配等特性。在Simulink模型里,这些参数会作为模块的输入,参与到动力学方程的计算中。
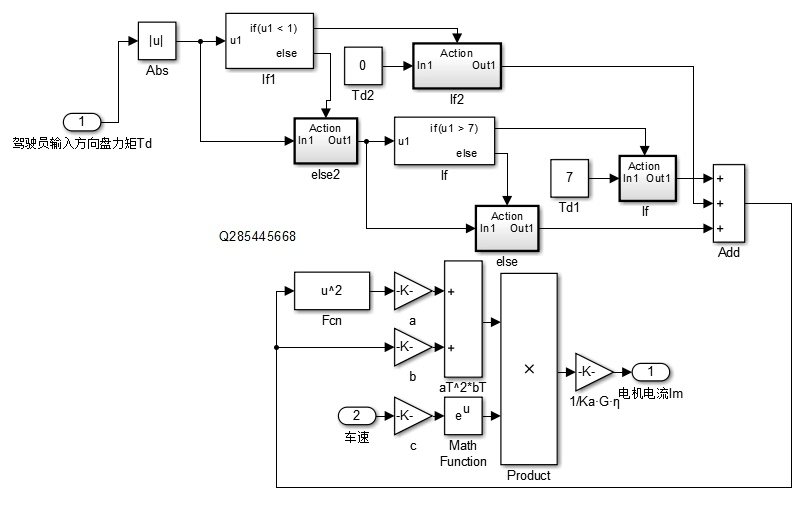
2. 助力特性曲线模型
助力特性曲线模型描述了助力大小与方向盘转角、车速等因素的关系。简单来说,它决定了在不同驾驶工况下,助力电机应该提供多大的助力。
function Tassist = assistCurveModel(theta, v)
% theta 方向盘转角
% v 车速
if v < 30
Tassist = 0.5 * theta;
else
Tassist = 0.3 * theta;
end
end这段代码定义了一个简单的助力特性曲线函数。当车速 v 小于30时,助力力矩 Tassist 与方向盘转角 theta 呈0.5倍的关系;车速大于等于30时,变为0.3倍关系。实际应用中,这个函数关系会更复杂,要综合考虑更多因素,但基本原理就是通过输入的方向盘转角和车速等信息,输出相应的助力力矩,为助力电机提供控制依据。
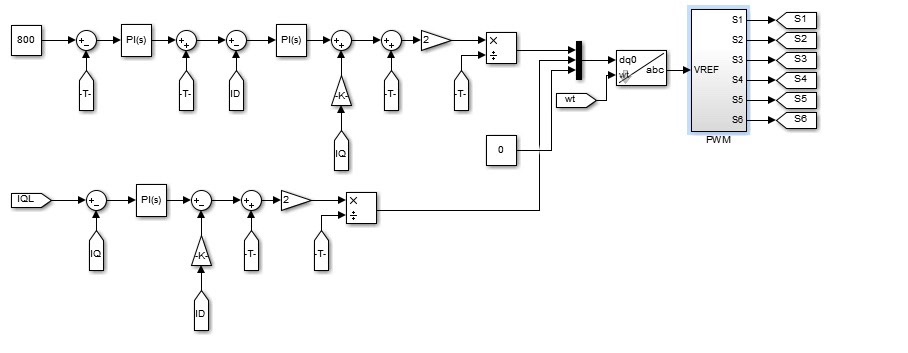
3. 助力电机模型
助力电机是EPS系统的执行机构,它根据助力特性曲线模型输出的指令,提供实际的转向助力。
classdef ElectricMotor
properties
Kt; % 转矩常数
R; % 电阻
L; % 电感
J; % 转动惯量
B; % 粘性摩擦系数
end
methods
function obj = ElectricMotor(Kt, R, L, J, B)
obj.Kt = Kt;
obj.R = R;
obj.L = L;
obj.J = J;
obj.B = B;
end
function T = getTorque(obj, V)
% V 电机输入电压
i = V / obj.R;
T = obj.Kt * i;
end
end
end这里定义了一个 ElectricMotor 类来模拟助力电机。类的属性包括转矩常数 Kt、电阻 R、电感 L、转动惯量 J 和粘性摩擦系数 B。通过 getTorque 方法,根据输入电压 V 计算出电机输出转矩 T。在Simulink模型中,这个类可以封装成一个模块,接收来自助力特性曲线模型的信号,输出实际的助力转矩。
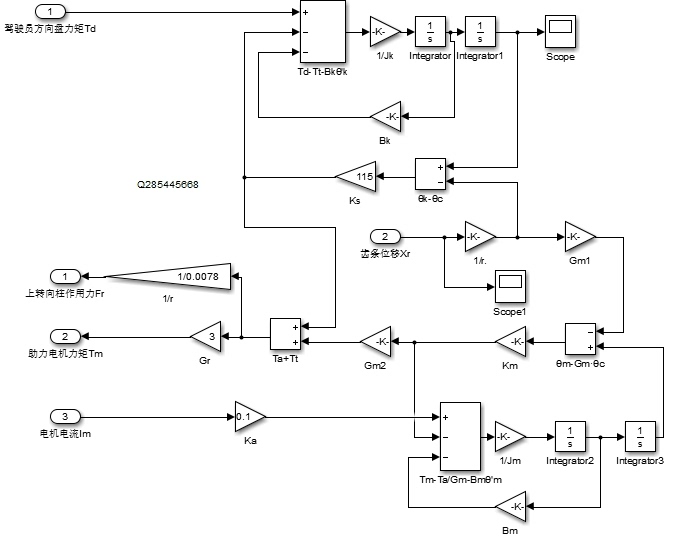
4. 齿条模型
齿条模型主要描述了转向齿条的运动,它将助力电机的旋转运动转化为直线运动,推动车轮转向。
function x_rack = rackModel(T, r)
% T 助力电机转矩
% r 齿轮齿条传动比
F = T / r;
% 这里简单假设齿条质量忽略不计,根据牛顿第二定律 F = ma,a = F/m,m 为0时,速度恒定
v_rack = F;
x_rack = v_rack * dt; % dt 时间步长,假设提前定义
end这段代码根据助力电机转矩 T 和齿轮齿条传动比 r 计算出作用在齿条上的力 F,进而得到齿条的速度 vrack,最后根据时间步长 dt 计算出齿条的位移 xrack。在Simulink里,这个模型模块与助力电机模型模块相连,共同完成从电机转矩到车轮转向动作的转化。
二、模型控制方法
这套MATLAB电动助力转向系统模型的控制方法相对简单。它基于前面提到的各个模型的输入输出关系,通过基本的数学公式和逻辑判断来实现控制。
MATLAB电动助力转向系统模型 simulink搭建整车二自由度模型、助力特性曲线模型、助力电机模型、齿条模型等。 模型控制方法简单,具有参考和建模公式等。 输入:前轮转角、方向盘力矩等 输出:转向助力力矩等
比如,在助力特性曲线模型中,通过判断车速和方向盘转角来决定助力力矩,这就是一种简单的控制逻辑。而在整个系统中,输入前轮转角、方向盘力矩等信号,经过各个模型的层层处理,最终输出转向助力力矩。
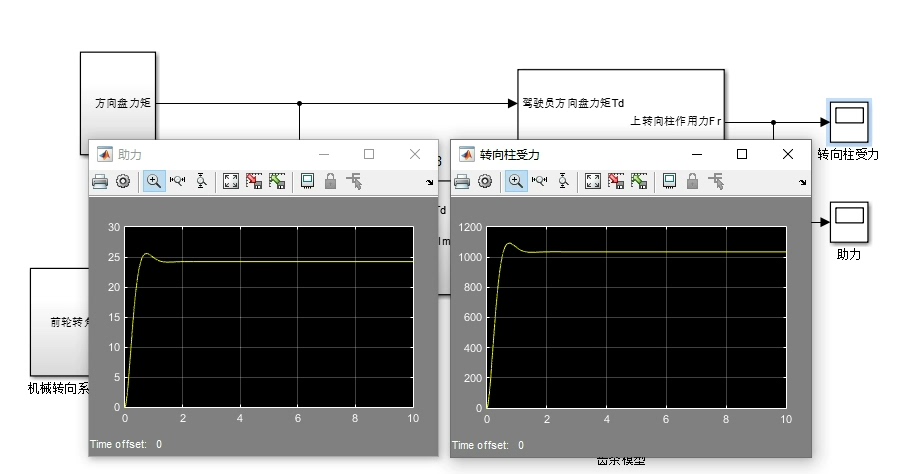
三、输入与输出
模型的输入主要有前轮转角、方向盘力矩等。前轮转角反映了驾驶员期望的车辆行驶方向,方向盘力矩则体现了驾驶员转动方向盘所施加的力。这些输入信息是整个系统运行的起始点,它们携带了驾驶员的驾驶意图。
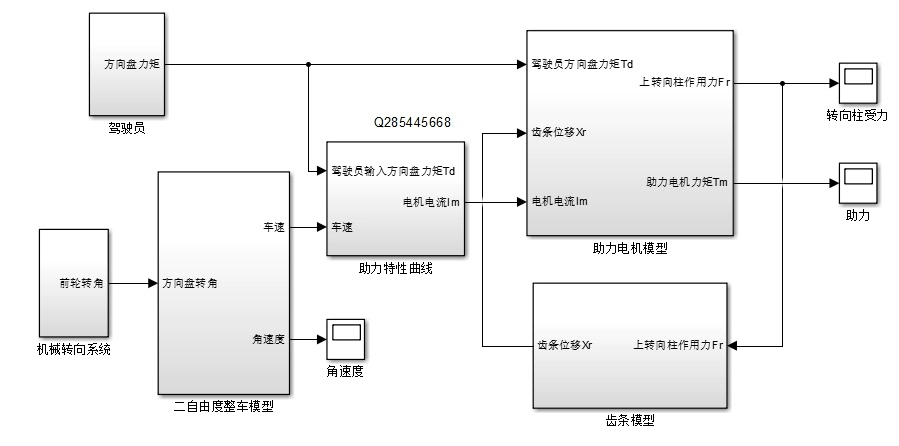
而模型的输出是转向助力力矩,这个输出直接作用于车辆的转向系统,帮助驾驶员更轻松地转动方向盘,实现车辆的转向操作。
总的来说,MATLAB电动助力转向系统模型通过Simulink搭建的各个关键模型,以及简单有效的控制方法,为我们研究和优化电动助力转向系统提供了一个强大的平台。无论是汽车工程师进行系统设计,还是科研人员探索新的控制算法,这个模型都具有极高的参考价值。希望大家通过这篇博文,对MATLAB电动助力转向系统模型有了更深入的了解。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 15
15 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)