11电平三相MMC逆变器并网控制技术与Simulink仿真探索
11电平三相MMC(模块化多电平换流器)逆变器并网/双闭环/载波移相调制/电容电压均衡控制/二倍频环流抑制控制/simulink仿真 1.采用双闭环控制,外环PQ控制,内环控制并网电流。 并网电流波形质量好,输出功率跟随指令值,额定容量10MW 2.模型桥臂子模块10个,11电平,采用载波移相调制。 3.采用负序环流抑制(CCSC)抑制桥臂二倍频环流,采用电容电压均衡控制,均压效果良好。 模型版本为21a,附参考文献
在电力电子领域,11电平三相MMC(模块化多电平换流器)逆变器的并网控制技术一直是研究热点。今天就来跟大家分享下基于双闭环、载波移相调制以及电容电压均衡控制和二倍频环流抑制控制的相关内容,并结合Simulink仿真进行分析。
双闭环控制策略
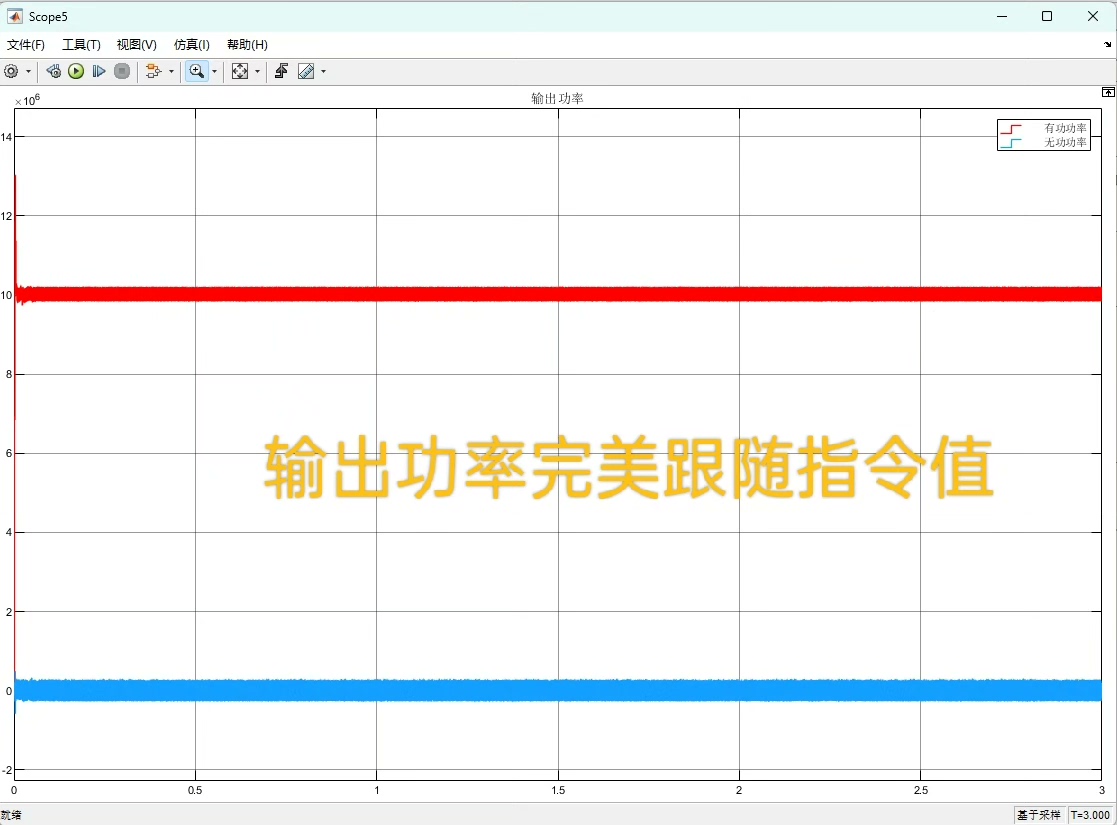
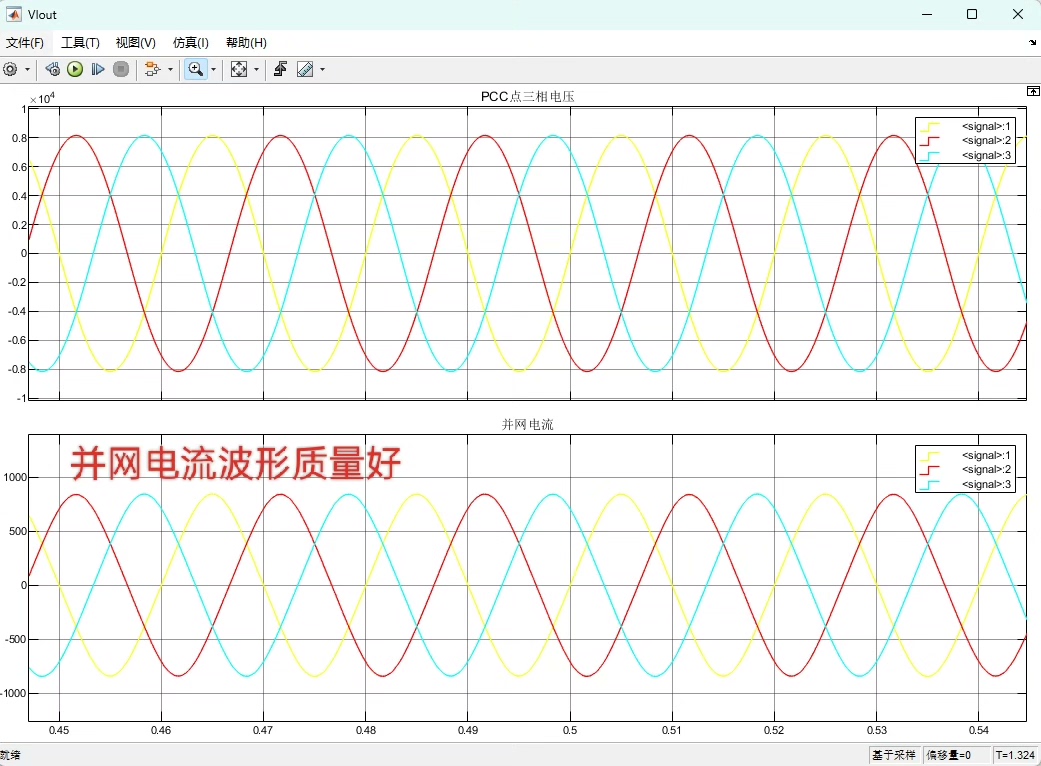
采用双闭环控制,外环为PQ控制,内环则负责控制并网电流。这种控制方式的好处是可以有效提高并网电流的波形质量,并且让输出功率紧紧跟随指令值。在本次研究中,逆变器的额定容量设定为10MW 。
PQ外环控制
PQ外环控制的核心目标是根据系统需求,准确地控制输出的有功功率(P)和无功功率(Q)。它会根据功率指令值与实际测量值的偏差,通过PI控制器计算出需要的d轴和q轴电流指令值。以下是一段简单示意的PQ外环控制的伪代码(实际在Simulink中以模块搭建为主,此处仅为辅助理解):
% 假设已知功率指令值P_ref, Q_ref
% 以及测量得到的实际功率P_meas, Q_meas
P_error = P_ref - P_meas;
Q_error = Q_ref - Q_meas;
% PI控制器参数
Kp_P = 0.5;
Ki_P = 0.1;
Kp_Q = 0.5;
Ki_Q = 0.1;
% 积分项初始化
int_P = 0;
int_Q = 0;
% 时间步长假设为dt
dt = 0.001;
% 计算d轴和q轴电流指令值
for k = 1:N % N为总的时间步数
int_P = int_P + P_error(k)*dt;
int_Q = int_Q + Q_error(k)*dt;
id_ref(k) = Kp_P*P_error(k) + Ki_P*int_P;
iq_ref(k) = Kp_Q*Q_error(k) + Ki_Q*int_Q;
end这段代码通过计算功率偏差,利用PI控制器的比例和积分作用,动态调整d轴和q轴电流指令值,为内环电流控制提供准确的参考。
并网电流内环控制
内环控制以PQ外环输出的d轴和q轴电流指令值为目标,对实际的并网电流进行调节。其目的是让实际并网电流快速、准确地跟踪指令值,从而保证并网电流的高质量输出。在Simulink中,通常会采用电流滞环比较器或者PI电流控制器来实现这一功能。以下以PI电流控制器为例,展示一段简单代码示意:
% 假设已知d轴和q轴电流指令值id_ref, iq_ref
% 以及测量得到的实际d轴和q轴电流id_meas, iq_meas
Kp_i = 0.2;
Ki_i = 0.05;
int_id = 0;
int_iq = 0;
for k = 1:N
id_error = id_ref(k) - id_meas(k);
iq_error = iq_ref(k) - iq_meas(k);
int_id = int_id + id_error(k)*dt;
int_iq = int_iq + iq_error(k)*dt;
% 输出控制量,例如调制波信号
vd(k) = Kp_i*id_error(k) + Ki_i*int_id;
vq(k) = Kp_i*iq_error(k) + Ki_i*int_iq;
end这里通过计算电流偏差,并结合PI控制器的作用,输出用于调制的控制量,以实现对并网电流的精确控制。
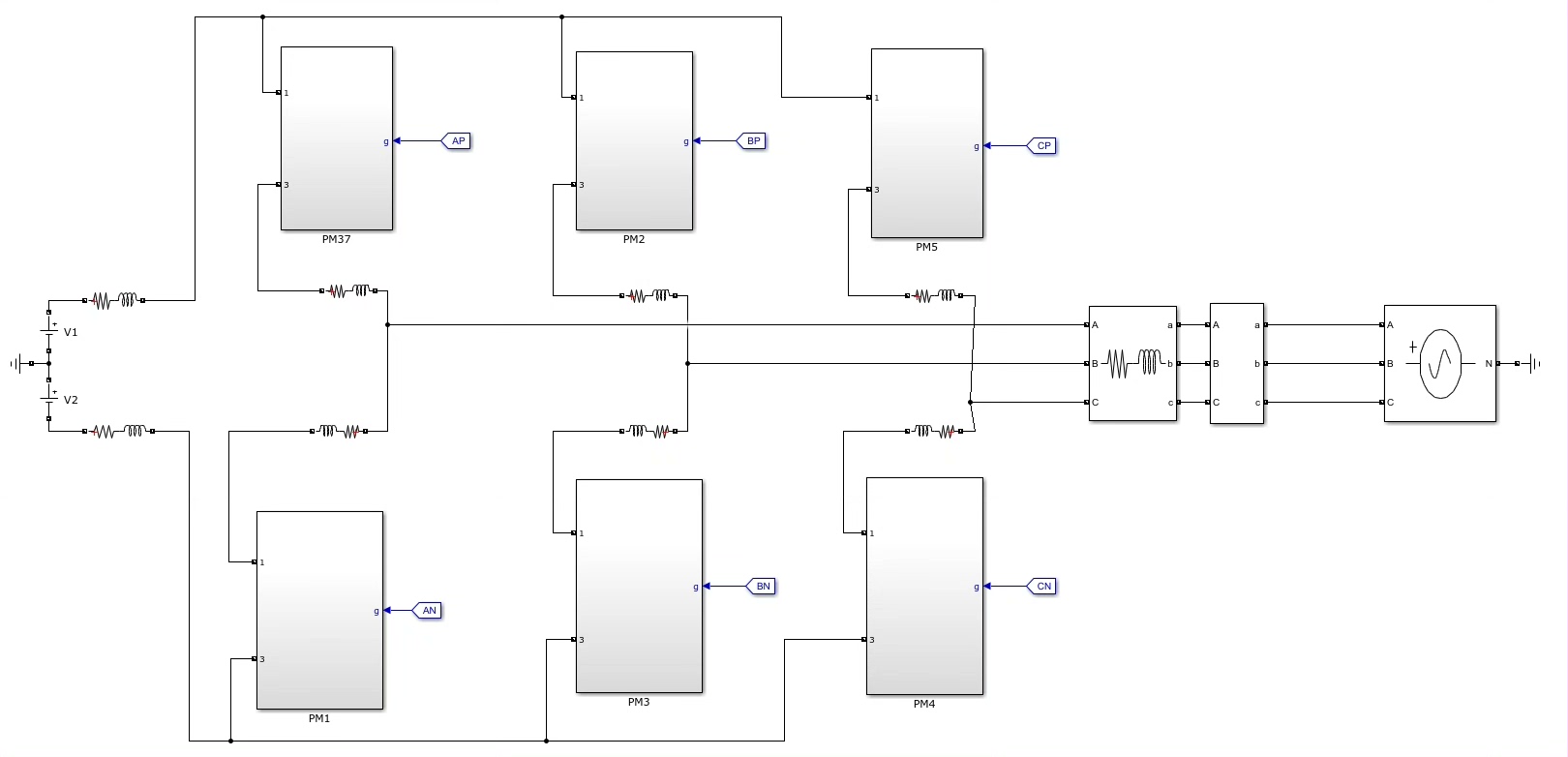
11电平与载波移相调制
本次模型的桥臂子模块设定为10个,从而实现11电平的输出。采用载波移相调制技术,它的优点在于可以有效降低输出电压的谐波含量。在载波移相调制中,每个子模块的载波信号在相位上依次错开一定角度。例如,对于10个子模块的情况,载波移相角为 $2\pi / 10 = 36^{\circ}$ 。在Simulink中搭建此模型时,会用到多个载波信号发生器,每个发生器的相位依次设置为 $0^{\circ}, 36^{\circ}, 72^{\circ}, \cdots, 324^{\circ}$ ,然后将这些载波信号与调制波信号进行比较,生成相应的PWM信号来控制子模块的通断。
电容电压均衡与二倍频环流抑制
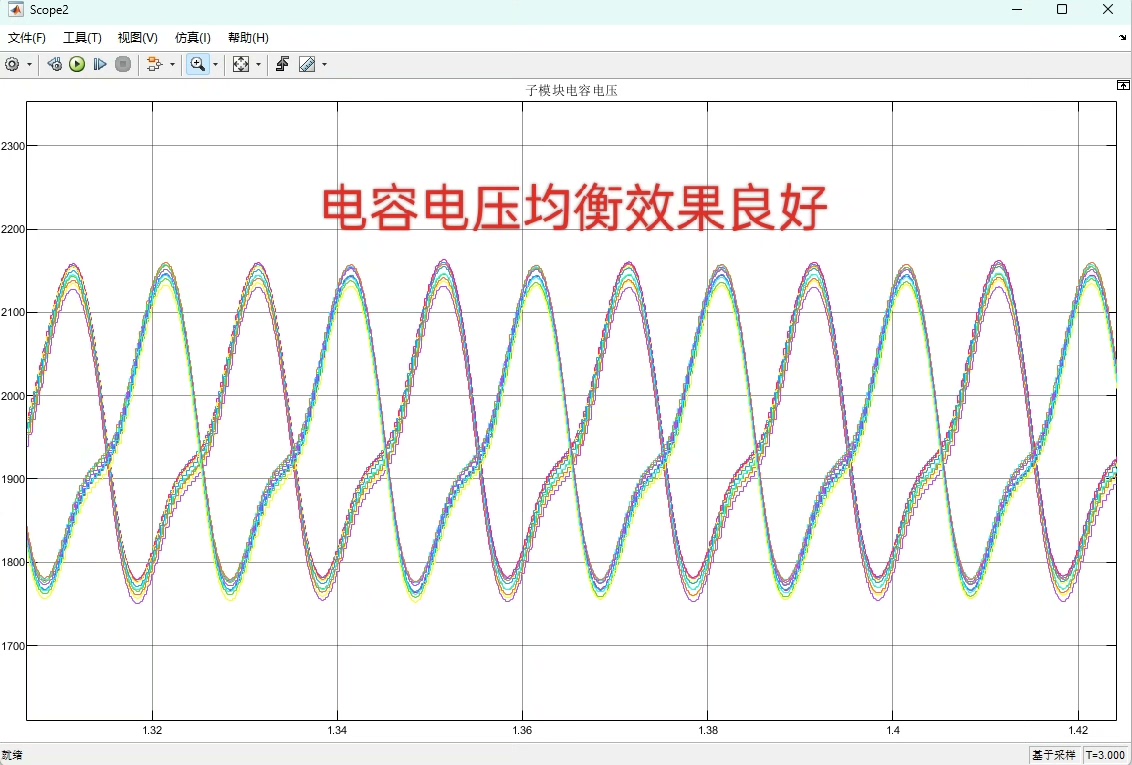
电容电压均衡控制
为了确保MMC各子模块电容电压的一致性,采用了电容电压均衡控制。这一控制策略能够有效避免因电容电压不均衡导致的系统性能下降甚至故障。在实际实现中,会实时监测每个子模块的电容电压,根据电压偏差来调整子模块的投入和切除。以下是一个简单的电容电压均衡控制逻辑示意代码:
% 假设已知所有子模块电容电压值C_voltages
% 设定的参考电压值V_ref
for j = 1:num_submodules % num_submodules为子模块数量
voltage_error = V_ref - C_voltages(j);
if voltage_error > threshold % threshold为设定的偏差阈值
% 采取措施降低该子模块电容电压,例如切除该子模块
submodule_status(j) = 0;
elseif voltage_error < -threshold
% 采取措施升高该子模块电容电压,例如投入该子模块
submodule_status(j) = 1;
end
end通过这样的逻辑,不断调整子模块的状态,使得各子模块电容电压保持在均衡状态,实际应用中还会结合更复杂的算法和控制手段,但基本原理类似。
二倍频环流抑制(CCSC)
桥臂中的二倍频环流会增加系统损耗,影响系统的稳定性和效率。因此采用负序环流抑制(CCSC)方法来抑制二倍频环流。CCSC通过检测桥臂电流中的负序分量,并引入相应的控制量来抵消这部分环流。在Simulink模型中,会涉及到对桥臂电流的分解,提取负序分量,然后经过一系列的控制算法生成补偿信号,注入到桥臂电流中,从而达到抑制二倍频环流的目的。
Simulink仿真与模型版本
本次研究采用的模型版本为21a 。在Simulink中搭建完整的11电平三相MMC逆变器并网模型,将上述的双闭环控制、载波移相调制、电容电压均衡控制以及二倍频环流抑制控制等功能模块有机结合起来。通过仿真运行,可以直观地看到并网电流波形质量良好,输出功率能够精确跟随指令值,同时电容电压均衡控制效果显著,二倍频环流也得到了有效抑制。
这里附上相关参考文献[文献名称1]、[文献名称2]等,感兴趣的朋友可以进一步深入研究。希望通过这次分享,能让大家对11电平三相MMC逆变器并网控制技术有更清晰的认识和理解,在实际项目和研究中有所帮助。
以上代码仅为示意帮助理解原理,实际工程应用中需根据具体情况详细设计和优化。
11电平三相MMC(模块化多电平换流器)逆变器并网/双闭环/载波移相调制/电容电压均衡控制/二倍频环流抑制控制/simulink仿真 1.采用双闭环控制,外环PQ控制,内环控制并网电流。 并网电流波形质量好,输出功率跟随指令值,额定容量10MW 2.模型桥臂子模块10个,11电平,采用载波移相调制。 3.采用负序环流抑制(CCSC)抑制桥臂二倍频环流,采用电容电压均衡控制,均压效果良好。 模型版本为21a,附参考文献
参考文献:
[文献名称1]
[文献名称2]

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 16
16 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)