探索分布式驱动电动汽车复合制动控制策略
分布式驱动电动汽车复合制动控制策略,建立七自由度整车模型、魔术轮胎模型、电机模型、电池模型,研究上下层机电复合控制策略
在电动汽车发展的浪潮中,制动控制策略对于车辆的安全性、能量回收效率以及整体性能起着关键作用。今天咱们就来聊聊分布式驱动电动汽车复合制动控制策略,这里面涉及到一系列模型的建立以及上下层机电复合控制策略的研究。
各类模型搭建
七自由度整车模型
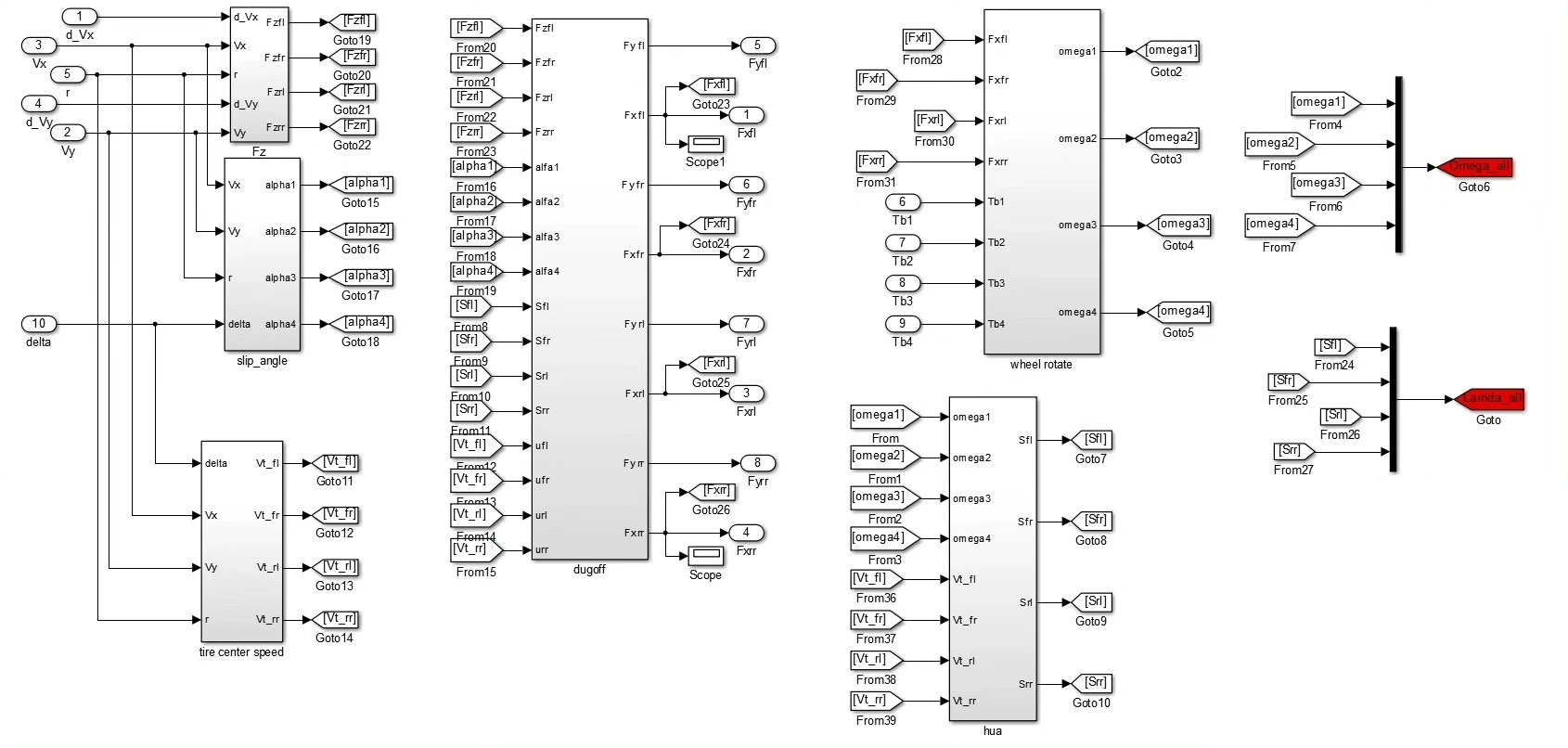
七自由度整车模型能够较为精准地描述车辆在行驶过程中的各种运动状态。它考虑了车辆的纵向、侧向、垂向运动,以及横摆、侧倾、俯仰运动和转向轮的转动。简单来说,这个模型就像是给车辆做了一个全方位的 “运动画像”。以下是一个简化的七自由度整车动力学模型在代码中的体现(这里以Python和一些常用的科学计算库为例):
import numpy as np
# 车辆参数设置
m = 1500 # 车辆质量 (kg)
Iz = 2500 # 车辆绕z轴转动惯量 (kg·m^2)
lf = 1.2 # 质心到前轴距离 (m)
lr = 1.4 # 质心到后轴距离 (m)
Cf = 12000 # 前轮侧偏刚度 (N/rad)
Cr = 10000 # 后轮侧偏刚度 (N/rad)
def vehicle_dynamics(state, input):
x, y, psi, vx, vy, omega, delta = state
Fxf, Fxr = input
# 纵向力平衡方程
Fx = Fxf + Fxr
vx_dot = (Fx - m * vy * omega) / m
# 侧向力平衡方程
Fyf = -Cf * (delta - np.arctan((vy + lf * omega) / vx))
Fyr = -Cr * (-np.arctan((vy - lr * omega) / vx))
Fy = Fyf + Fyr
vy_dot = (Fy + m * vx * omega) / m
# 横摆力矩平衡方程
Mz = lf * Fyf - lr * Fyr
omega_dot = Mz / Iz
return np.array([vx, vy, omega, vx_dot, vy_dot, omega_dot, 0])分析:这段代码通过定义车辆的一些基本参数,构建了一个简单的七自由度整车动力学模型函数。函数输入当前车辆的状态和前后轮纵向力,输出车辆状态的变化率。它依据车辆动力学基本原理,分别计算纵向力平衡、侧向力平衡和横摆力矩平衡,从而反映车辆的运动变化。
魔术轮胎模型
魔术轮胎模型在描述轮胎力与轮胎运动状态之间的关系上表现出色。它能更准确地模拟实际行驶中轮胎的复杂特性。在代码实现上,可能会基于一些实验数据拟合出轮胎力与滑移率、侧偏角等参数的关系。
import numpy as np
def magic_formula(s, alpha):
# 一些预定义参数,这里简单示意
B = 10
C = 1.5
D = 1000
E = -1
Fz = 5000 # 垂直载荷
# 计算侧向力
Fy = D * np.sin(C * np.arctan(B * s * (1 - E) + E * np.arctan(B * s)))
# 计算纵向力,这里简单示意,实际更复杂
Fx = D * np.sin(C * np.arctan(B * alpha * (1 - E) + E * np.arctan(B * alpha)))
return Fx, Fy分析:这段代码中的 magic_formula 函数,接收滑移率 s 和侧偏角 alpha 作为输入,通过魔术公式中的一些参数计算纵向力和侧向力。虽然实际应用中参数可能需要根据具体轮胎特性详细标定,但这里展示了基本的计算思路。
电机模型与电池模型
电机模型用于描述电机的转矩、转速以及效率等特性。对于分布式驱动电动汽车,每个电机的精确控制十分关键。而电池模型则关乎能量管理和回收,影响着车辆的续航能力。
# 简单的电机模型示例
def motor_model(T_req, omega):
# 假设一些电机参数
Kt = 1 # 转矩常数
R = 0.1 # 电枢电阻
L = 0.001 # 电枢电感
V = 400 # 电源电压
I = (V - Kt * omega) / R
T = Kt * I
if T > T_req:
T = T_req
return T分析:这个简单的电机模型函数 motormodel 根据需求转矩 Treq 和电机转速 omega,结合电机的一些基本参数,计算电机实际输出转矩。它考虑了电机的电气特性以及转矩限制,以满足车辆实际运行需求。
电池模型会更复杂一些,涉及到电池的SOC(State of Charge,荷电状态)计算、内阻变化等。这里简单示意一个SOC计算的代码片段:
# 简单的电池SOC计算
def calculate_soc(I, dt, soc0, Q):
# I: 电流,dt: 时间步长,soc0: 初始SOC,Q: 电池容量
dQ = I * dt
soc = soc0 - dQ / Q
if soc < 0:
soc = 0
elif soc > 1:
soc = 1
return soc分析:calculate_soc 函数通过电流 I 和时间步长 dt 来计算电池容量的变化,进而更新SOC。它确保SOC始终在合理的0到1范围内,为电池能量管理提供基础数据。
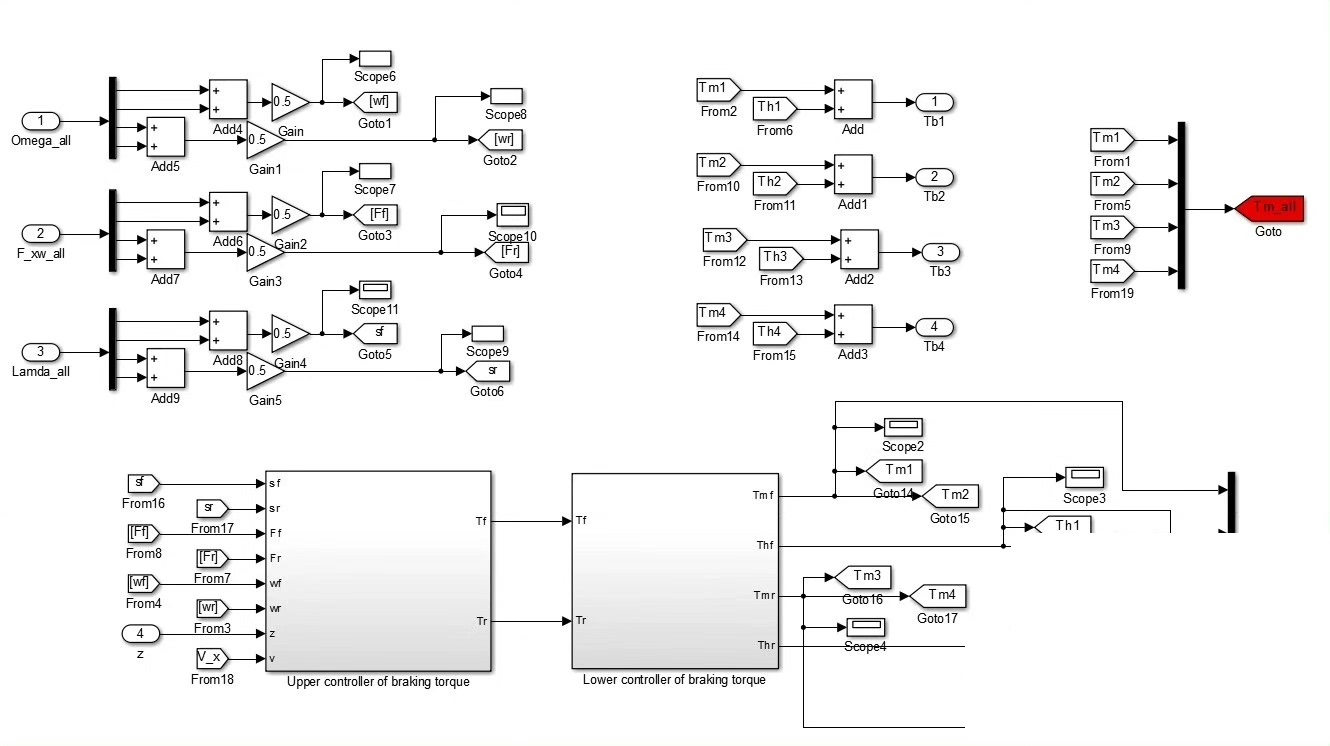
上下层机电复合控制策略研究
在建立好这些模型后,上下层机电复合控制策略就登场了。上层控制策略通常基于整车的行驶工况、驾驶员意图等信息,制定总体的制动目标和分配方案。比如,根据车速、制动踏板开度等判断是轻制动还是紧急制动,然后决定机械制动和电机制动的大致分配比例。
def upper_control(v, pedal):
if v < 30 and pedal < 0.3:
# 轻制动,更多电机制动
brake_type = 'electric'
target_torque = pedal * 100
else:
# 一般或紧急制动,混合制动
brake_type ='mixed'
target_torque = pedal * 200
return brake_type, target_torque分析:upper_control 函数依据车速 v 和制动踏板开度 pedal 来确定制动类型和目标转矩。如果车速较低且踏板开度小,倾向于电机制动;否则采用混合制动,体现了上层控制对不同工况的判断和制动策略选择。
分布式驱动电动汽车复合制动控制策略,建立七自由度整车模型、魔术轮胎模型、电机模型、电池模型,研究上下层机电复合控制策略
下层控制策略则是根据上层分配的任务,精确控制电机和机械制动系统的执行。对于电机,需要实时调节其转矩输出,以满足制动需求;对于机械制动,要控制制动压力等参数。这就像是一场精密的舞蹈,各个部件在下层控制的指挥下协同工作。
def lower_control(brake_type, target_torque, motor_state, brake_system_state):
if brake_type == 'electric':
# 控制电机输出转矩
motor_torque = motor_model(target_torque, motor_state['omega'])
mechanical_brake_force = 0
else:
# 混合制动,分配电机和机械制动
motor_torque = motor_model(target_torque * 0.6, motor_state['omega'])
mechanical_brake_force = target_torque * 0.4 * 1000 # 转换为制动力
# 更新电机和制动系统状态
motor_state['torque'] = motor_torque
brake_system_state['force'] = mechanical_brake_force
return motor_state, brake_system_state分析:lower_control 函数根据上层确定的制动类型和目标转矩,结合电机和制动系统当前状态,分别控制电机转矩和机械制动力。如果是电机制动,机械制动力为0;混合制动时按比例分配,最后更新相关部件状态,完成精确的制动执行。
分布式驱动电动汽车复合制动控制策略通过这些模型的搭建和上下层控制策略的协同,有望实现更高效、安全、智能的制动效果,为电动汽车的发展添砖加瓦。这是一个充满挑战与机遇的领域,还有许多细节等待我们进一步探索和优化。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)