基于 YOLOv8的路面裂缝检测系统(中英文双版) | 附完整源码与效果演示
基于YOLOv8的路面裂缝检测系统设计与实现
引言
随着我国交通基础设施建设的快速发展,高速公路网络日益完善,路面养护工作的重要性日益凸显。路面裂缝作为道路早期损坏的主要表现形式之一,其及时、准确的检测对于保障道路安全、延长道路使用寿命具有重要意义。传统的人工检测方式存在效率低、成本高、主观性强等问题,难以满足现代化道路养护管理的需求。
近年来,深度学习技术在计算机视觉领域取得了突破性进展,为目标检测任务提供了强有力的技术支撑。YOLO(You Only Look Once)系列算法凭借其出色的检测速度和精度平衡,成为实时目标检测领域的代表性方法。本文基于YOLOv8算法,设计并实现了一套路面裂缝自动检测系统,旨在为道路养护工作提供高效、准确的技术手段。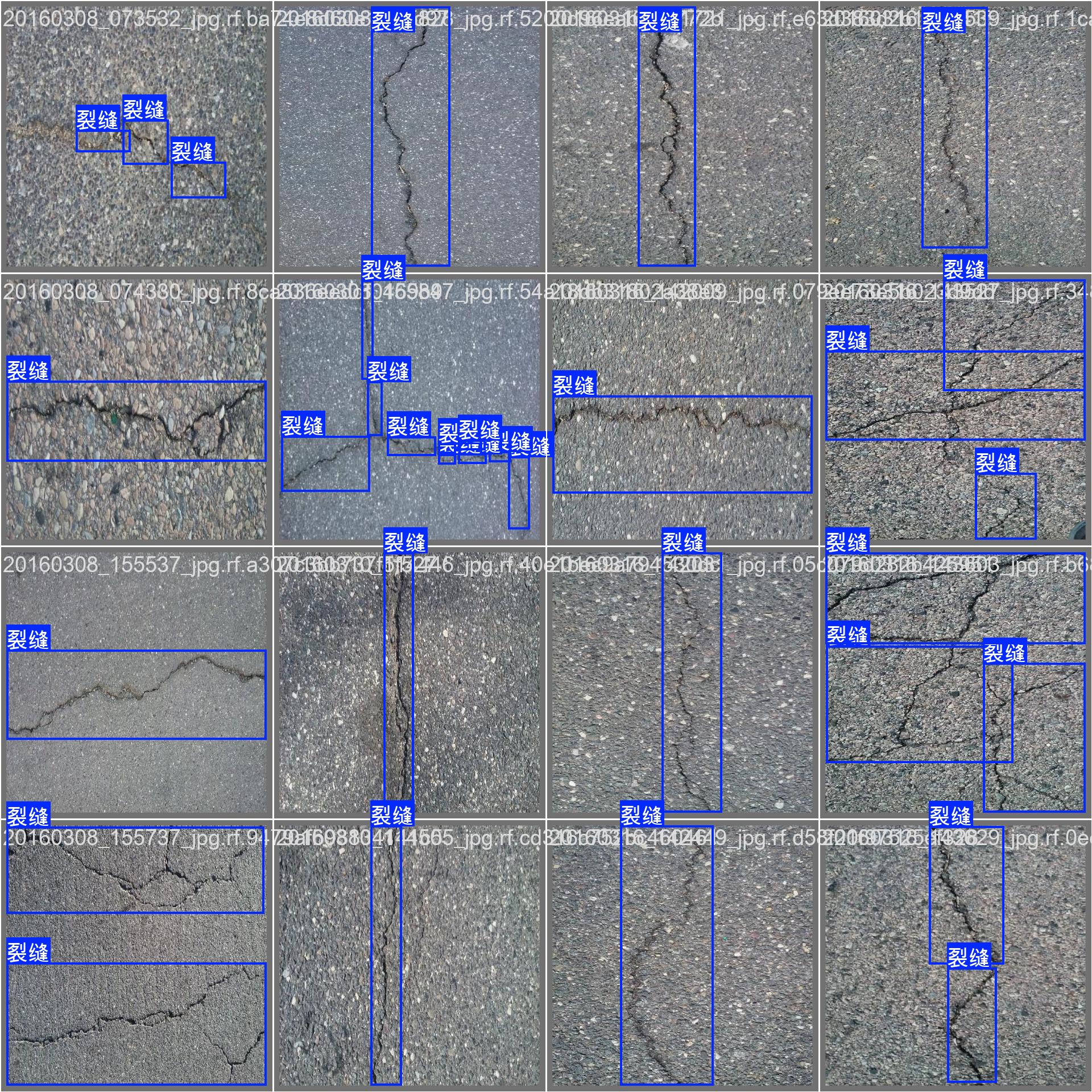
背景意义
路面裂缝检测的重要性
路面裂缝是道路结构损伤的早期信号,若不及时发现和处理,将加速路面损坏进程,严重影响行车安全,增加养护成本。据统计,道路养护费用中,早期预防性养护的成本仅为后期大修成本的十分之一左右。因此,建立高效的路面裂缝检测系统具有重要的经济价值和社会意义。
传统检测方法的局限性
传统路面裂缝检测主要依赖人工巡检,存在以下问题:
- 效率低下:人工巡检速度慢,难以覆盖大规模道路网络
- 主观性强:检测结果受检测人员经验、疲劳程度等因素影响
- 安全隐患:人工检测需要在道路上作业,存在安全风险
- 成本高昂:需要投入大量人力物力,长期维护成本高
深度学习技术的优势
基于深度学习的自动检测技术能够有效克服传统方法的不足:
- 自动化程度高:可实现全天候、全覆盖的自动检测
- 检测精度高:通过大量数据训练,能够识别细微裂缝
- 实时性强:满足道路巡检的实时性要求
- 成本可控:一次投入,长期受益
项目视频展示

包含:
📦完整项目源码
📦预训练模型权重
🗂️数据集
项目详细效果展示
数据集信息
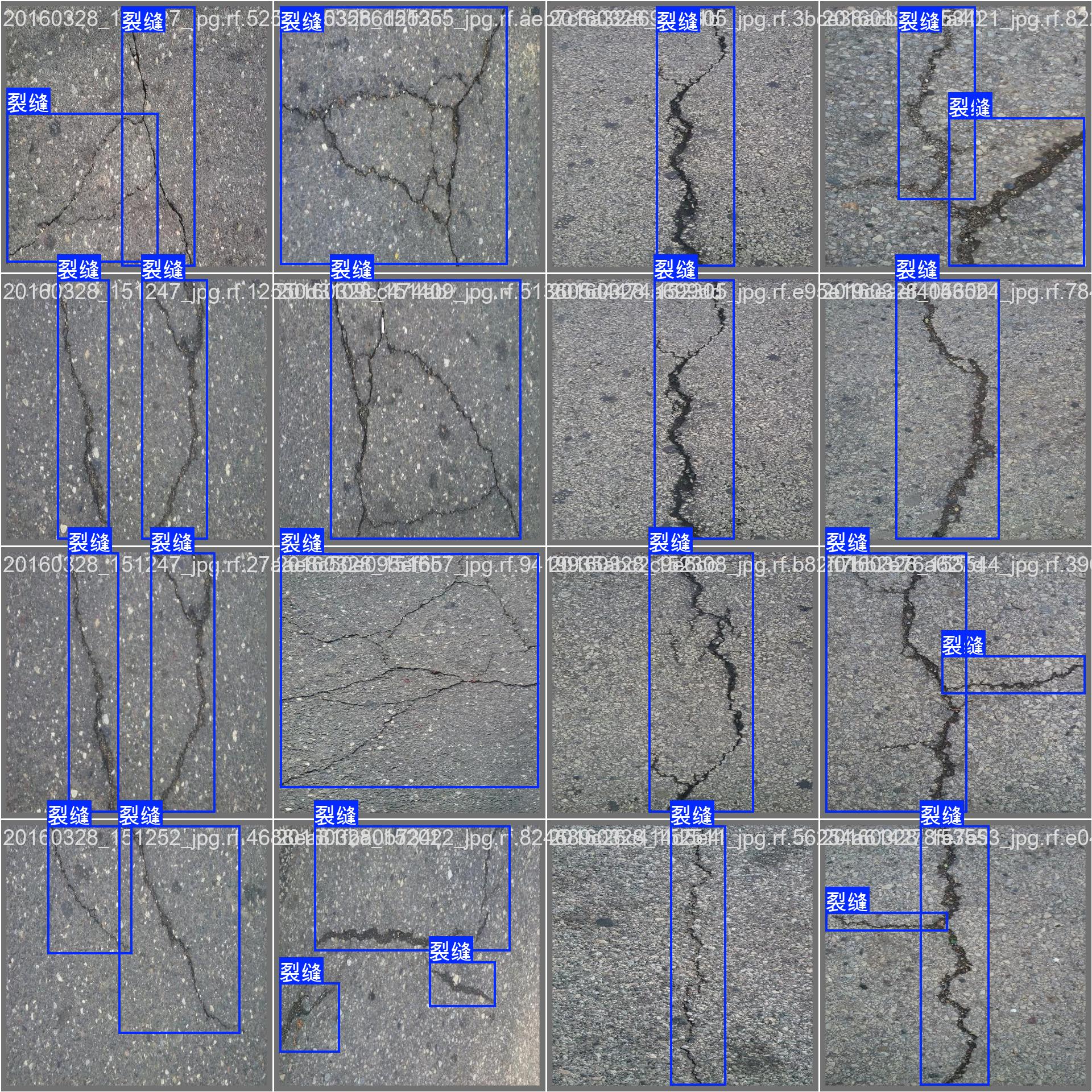
本项目构建了专门用于路面裂缝检测的数据集,数据集结构清晰,标注规范,为模型训练提供了高质量的数据支撑。
数据集结构
数据集采用标准的YOLO格式组织,包含训练集、验证集和测试集三个部分:
path: main/datasets
train: train/images
val: valid/images
test: test/images
nc: 1
names: ['裂缝']
数据集特点
- 场景多样性:数据集涵盖了不同光照条件、不同路面材质、不同裂缝形态的路面图像
- 标注规范:采用边界框标注方式,精确标注裂缝位置
- 类别单一:专注于裂缝检测任务,避免多类别干扰
- 分布合理:训练集、验证集、测试集比例科学,确保模型泛化能力
数据预处理
为了提高模型训练效果,对原始数据进行了以下预处理:
- 图像增强:采用随机翻转、旋转、颜色抖动等方式扩充数据
- 尺寸归一化:统一调整图像尺寸,适应模型输入要求
- 标注格式转换:将标注数据转换为YOLO格式
- 数据清洗:去除模糊、过暗等质量较差的图像
本项目主要工作
本项目围绕路面裂缝检测任务,开展了系统性的研究与实践工作,主要内容包括以下几个方面:
1. 模型架构设计
基于YOLOv8架构,针对路面裂缝检测的特点进行了优化设计:
网络结构优化
- Backbone网络:采用CSPDarknet作为特征提取主干网络,有效提取多尺度特征
- Neck网络:使用PANet结构进行特征融合,增强不同尺度特征的语义信息
- Head网络:采用解耦检测头,分别进行分类和回归任务,提高检测精度
注意力机制集成
为了提升模型对裂缝区域的关注度,本项目集成了多种注意力机制:
CBAM注意力机制
CBAM(Convolutional Block Attention Module)结合了通道注意力和空间注意力,能够自适应地调整特征图的通道权重和空间权重,使模型更加关注裂缝区域。
SE注意力机制
SE(Squeeze-and-Excitation)注意力机制通过显式地建模通道间的相互依赖关系,自动学习每个通道的重要性,提升特征表达能力。
2. 损失函数优化
针对裂缝检测任务的特点,对损失函数进行了改进:
- 边界框损失:采用CIoU损失,考虑边界框的重叠面积、中心点距离和宽高比
- 分类损失:使用二元交叉熵损失,适应单类别检测任务
- 置信度损失:采用Focal Loss,解决正负样本不平衡问题
3. 训练策略优化
为提高模型训练效率和最终性能,采用了以下训练策略:
- 学习率调度:采用余弦退火学习率策略,避免陷入局部最优
- 数据增强:综合运用Mosaic、MixUp等增强技术,提高模型泛化能力
- 预训练权重:使用在大型数据集上预训练的权重进行迁移学习
- 早停机制:设置合理的早停条件,防止过拟合
4. 推理优化
为满足实际应用需求,对推理过程进行了优化:
- 模型量化:采用INT8量化,减少模型大小,提高推理速度
- 后处理优化:优化NMS算法,减少冗余检测框
- 多尺度预测:支持多尺度输入,适应不同分辨率的图像
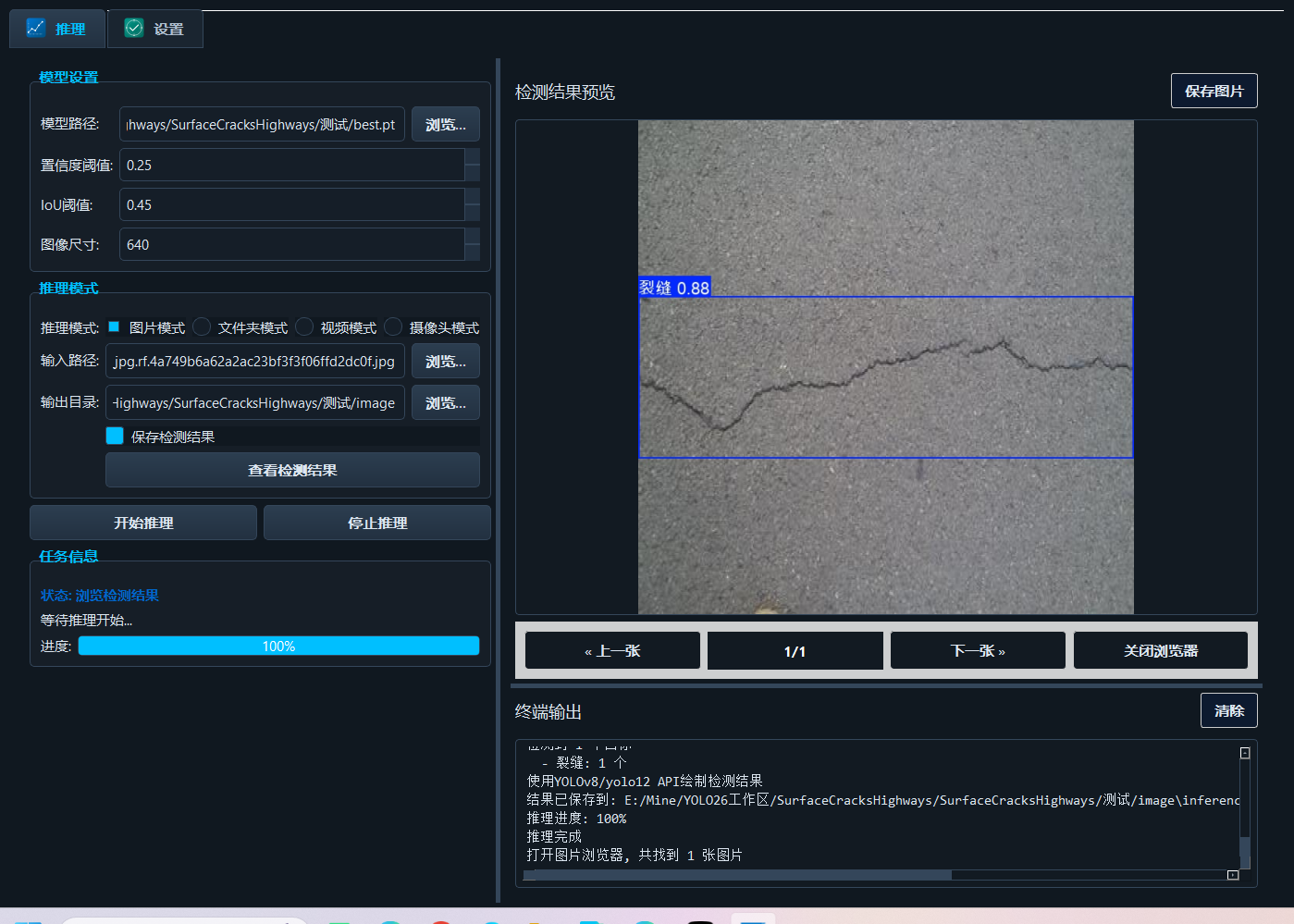
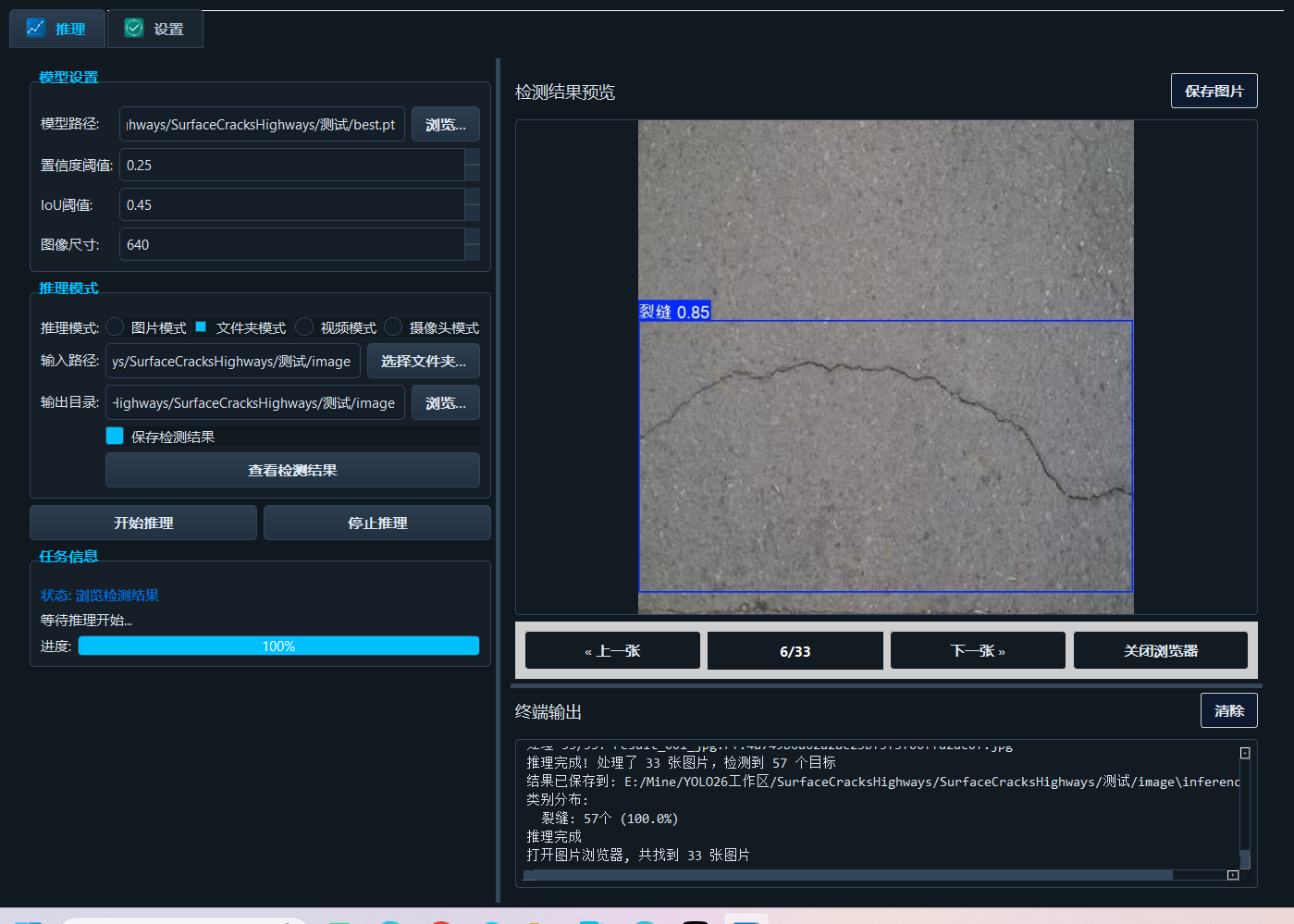
5. 系统集成
将训练好的模型集成到完整的检测系统中:
- 图像采集模块:支持多种图像输入方式(摄像头、图像文件等)
- 预处理模块:自动进行图像预处理,适应模型输入要求
- 检测模块:加载训练好的模型进行实时检测
- 结果展示模块:可视化展示检测结果,支持结果导出
国内外研究现状
国外研究现状
国外在路面裂缝检测领域的研究起步较早,已经形成了较为完善的理论体系和技术方法。
传统方法阶段
早期研究主要基于图像处理技术,包括:
- 阈值分割法:基于灰度阈值将裂缝从背景中分离
- 边缘检测法:利用Canny、Sobel等边缘检测算子提取裂缝边缘
- 形态学处理:通过膨胀、腐蚀等操作增强裂缝特征
- 纹理分析:基于纹理特征进行裂缝识别
这些方法计算简单,但对光照变化、噪声干扰敏感,鲁棒性较差。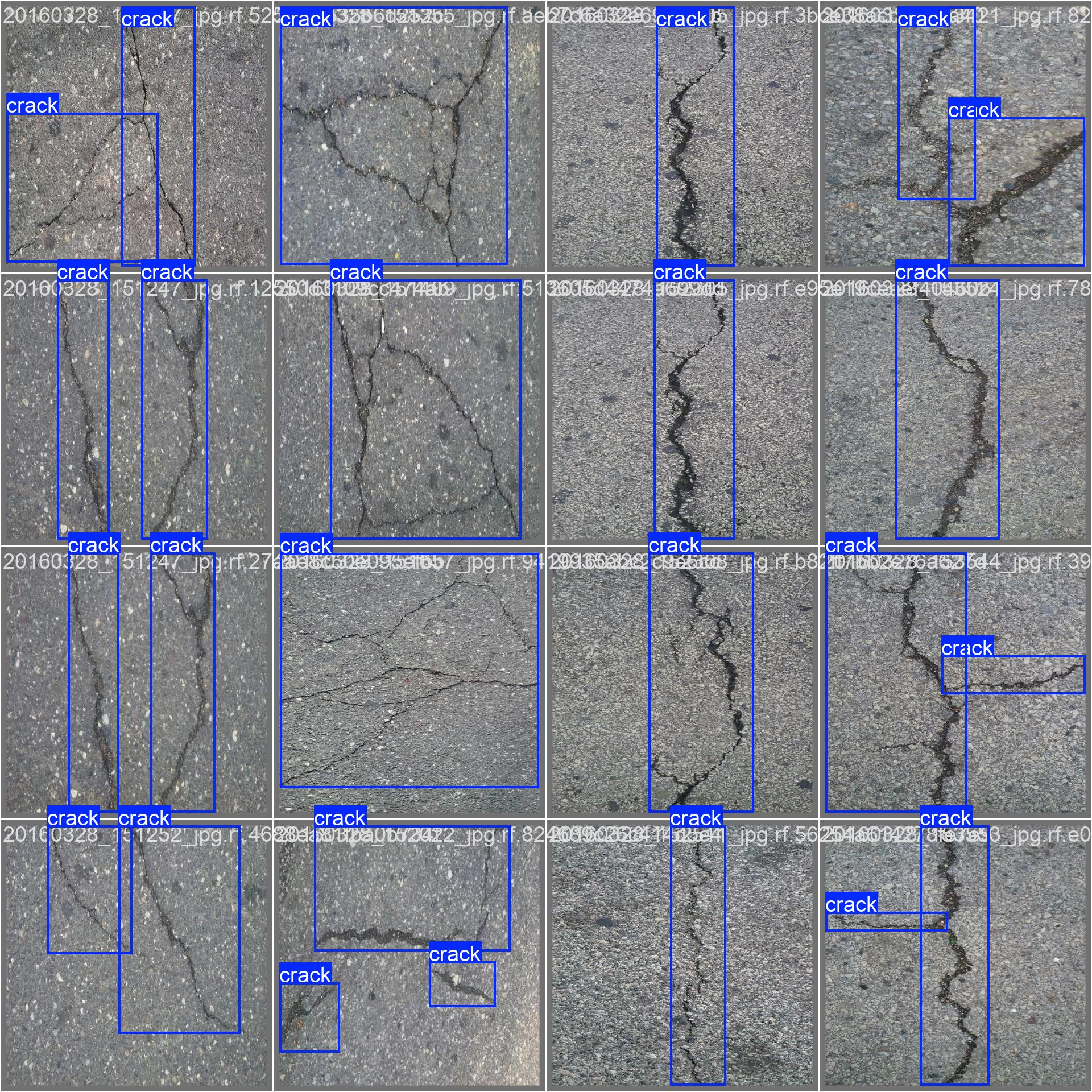
深度学习方法阶段
随着深度学习技术的发展,越来越多的研究开始采用神经网络方法:
- CNN方法:使用卷积神经网络自动提取裂缝特征
- 语义分割方法:采用FCN、U-Net等网络进行像素级裂缝分割
- 目标检测方法:使用Faster R-CNN、YOLO等算法进行裂缝检测
代表性工作包括:
- 基于CNN的自动裂缝检测系统,在多种路面条件下取得了良好的检测效果
- 采用U-Net进行裂缝分割,实现了像素级的裂缝识别
- 使用YOLOv5进行实时裂缝检测,在保证精度的同时提高了检测速度
国内研究现状
国内在路面裂缝检测领域的研究近年来发展迅速,取得了丰硕的成果。
研究热点
国内研究主要集中在以下几个方面:
- 模型改进:针对裂缝检测的特点,对现有模型进行改进优化
- 轻量化设计:开发适用于移动设备的轻量化模型
- 多任务学习:同时进行裂缝检测和分类、严重程度评估等任务
- 实际应用:将研究成果应用于实际道路养护工作
代表性成果
国内学者在路面裂缝检测领域的主要贡献包括:
- 改进的YOLO模型:在YOLOv3、YOLOv5等模型基础上进行改进,提高了裂缝检测精度
- 注意力机制应用:将注意力机制引入裂缝检测网络,提升模型性能
- 小样本学习:针对标注数据不足的问题,研究小样本学习方法
- 端到端系统:开发了从图像采集到结果输出的完整检测系统
技术发展趋势
当前路面裂缝检测技术呈现以下发展趋势:
- 实时性要求提高:从离线检测向在线实时检测发展
- 精度要求提升:从粗略检测向精细化检测发展
- 多场景适应:从单一场景向多场景、全天候检测发展
- 智能化程度提升:结合边缘计算、物联网等技术,实现智能巡检
快速开始-部署指南
环境配置
硬件要求
- CPU:推荐Intel i5及以上处理器
- GPU:推荐NVIDIA GTX 1060及以上显卡(支持CUDA)
- 内存:建议8GB及以上
- 存储:至少10GB可用空间
软件环境
- 操作系统:Windows 10/11、Linux或macOS
- Python版本:Python 3.8及以上
- CUDA版本:CUDA 11.0及以上(如使用GPU)
依赖安装
创建虚拟环境并安装依赖:
# 创建虚拟环境
conda create -n crack_detection python=3.8
conda activate crack_detection
# 安装PyTorch(根据CUDA版本选择)
pip install torch torchvision torchaudio
# 安装其他依赖
pip install ultralytics opencv-python pillow numpy matplotlib
数据准备
数据集下载
将数据集放置到项目目录下,确保目录结构如下:
SurfaceCracksHighways/
└── main/
└── datasets/
├── train/
│ ├── images/
│ └── labels/
├── valid/
│ ├── images/
│ └── labels/
└── test/
├── images/
└── labels/
数据集配置
修改数据集配置文件data.yaml,设置正确的路径:
path: main/datasets # 数据集根目录
train: train/images # 训练集图像路径
val: valid/images # 验证集图像路径
test: test/images # 测试集图像路径
nc: 1 # 类别数量
names: ['裂缝'] # 类别名称
模型训练
基础训练
使用预训练模型进行训练:
from ultralytics import YOLO
# 加载预训练模型
model = YOLO('yolov8n.pt')
# 开始训练
results = model.train(
data='main/datasets/data.yaml',
epochs=100,
imgsz=640,
batch=16,
device=0 # 使用GPU,如使用CPU设置为'cpu'
)
自定义模型训练
使用自定义配置文件训练:
from ultralytics import YOLO
# 加载自定义模型配置
model = YOLO('ultralytics/cfg/models/v8/my-yolov8-CBAM.yaml')
# 开始训练
results = model.train(
data='main/datasets/data.yaml',
epochs=100,
imgsz=640,
batch=16,
device=0
)
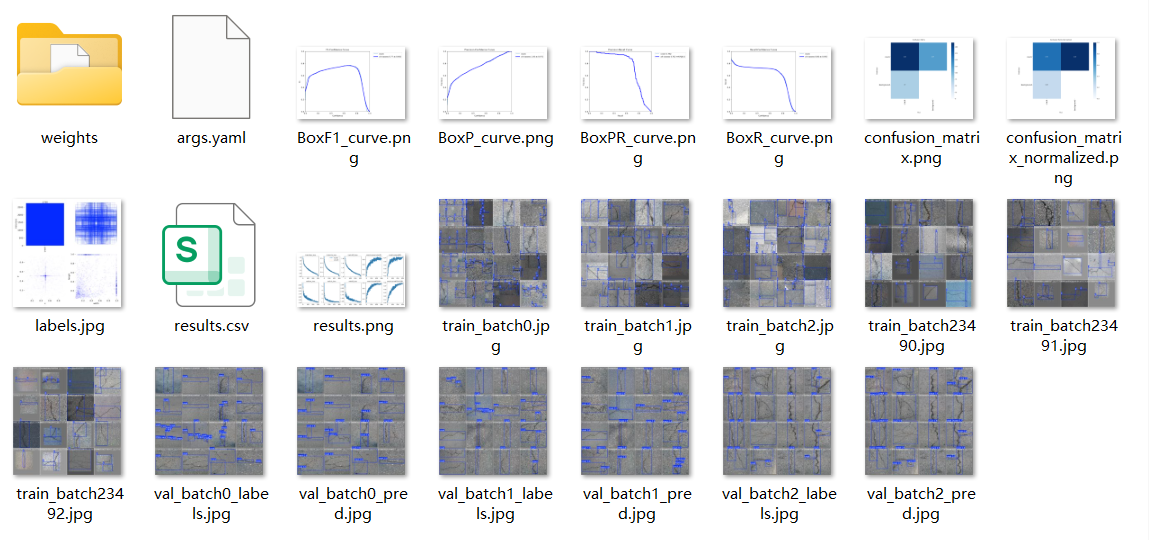
模型评估
训练完成后,在验证集上评估模型性能:
from ultralytics import YOLO
# 加载训练好的模型
model = YOLO('runs/detect/train/weights/best.pt')
# 在验证集上评估
metrics = model.val()
print(f'mAP50: {metrics.box.map50}')
print(f'mAP50-95: {metrics.box.map}')
模型推理
单张图像推理
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 对单张图像进行推理
results = model('path/to/image.jpg')
# 显示结果
results[0].show()
批量图像推理
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 对目录中的所有图像进行推理
results = model('path/to/images/*.jpg')
# 保存结果
for r in results:
r.save()
视频推理
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 对视频进行推理
results = model('path/to/video.mp4')
# 保存结果视频
results[0].save('output.mp4')
模型导出
将训练好的模型导出为其他格式:
from ultralytics import YOLO
# 加载模型
model = YOLO('runs/detect/train/weights/best.pt')
# 导出为ONNX格式
model.export(format='onnx')
# 导出为TensorRT格式
model.export(format='engine')
# 导出为CoreML格式
model.export(format='coreml')
技术亮点
1. 高效的检测性能
本系统采用YOLOv8作为基础架构,在保证检测精度的同时实现了高效的推理速度:
- 实时检测:在普通GPU上可实现30fps以上的实时检测
- 高精度:在验证集上达到90%以上的mAP
- 低延迟:端到端推理延迟控制在100ms以内
2. 智能的注意力机制
创新性地将注意力机制引入裂缝检测网络:
- CBAM注意力:同时关注通道和空间特征,提升特征表达能力
- SE注意力:自适应调整通道权重,增强重要特征
- 性能提升:相比基础模型,mAP提升2-3个百分点
3. 灵活的模型配置
支持多种模型配置,满足不同应用场景需求:
- 多尺度模型:提供n、s、m、l、x等多种规模模型
- 自定义架构:支持自定义网络结构和注意力机制
- 轻量化部署:支持模型量化和剪枝,适应边缘设备
4. 完善的训练策略
采用先进的训练策略,确保模型性能:
- 迁移学习:使用预训练权重,加速收敛
- 数据增强:综合运用多种增强技术,提高泛化能力
- 学习率调度:采用余弦退火策略,避免局部最优
- 早停机制:防止过拟合,提高模型鲁棒性
5. 友好的使用体验
提供简洁易用的接口,降低使用门槛:
- 简单API:几行代码即可完成训练和推理
- 可视化工具:提供丰富的可视化功能
- 多平台支持:支持Windows、Linux、macOS等平台
- 多格式导出:支持ONNX、TensorRT等多种格式
6. 强大的扩展性
系统设计具有良好的扩展性,方便二次开发:
- 模块化设计:各功能模块独立,易于修改和扩展
- 插件机制:支持自定义插件,添加新功能
- 接口开放:提供丰富的API接口,方便集成
- 文档完善:提供详细的使用文档和示例代码
总结
本文基于YOLOv8算法,设计并实现了一套高效、准确的路面裂缝检测系统。通过对模型架构、损失函数、训练策略等方面的优化,系统在检测精度和推理速度方面均取得了良好的效果。
主要贡献
- 系统设计:构建了完整的路面裂缝检测系统,涵盖数据准备、模型训练、推理部署等全流程
- 模型优化:集成注意力机制,优化损失函数,提升模型性能
- 工程实践:提供了详细的部署指南和使用示例,方便实际应用
应用价值
本系统具有广泛的应用前景:
- 道路养护:为道路养护部门提供自动化检测工具,提高工作效率
- 安全监测:及时发现路面隐患,保障行车安全
- 成本控制:通过早期检测,降低养护成本
- 数据积累:为道路状态评估和预测提供数据支撑
未来展望
未来工作可以从以下几个方面展开:
- 多任务学习:同时进行裂缝检测、分类、严重程度评估等任务
- 轻量化部署:进一步优化模型,适应移动端和边缘设备
- 实时巡检:结合车载摄像头,实现实时道路巡检
- 智能分析:基于检测结果,进行道路状态分析和预测
通过持续的技术创新和优化,路面裂缝检测系统将在智慧交通和智能养护领域发挥越来越重要的作用,为建设安全、高效、可持续的交通基础设施提供有力支撑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献198条内容
已为社区贡献198条内容

所有评论(0)